
ROV运动控制技术综述
2014-06-27 05:46魏延辉高延滨
重庆理工大学学报(自然科学) 2014年7期
刘 鑫,魏延辉,高延滨
(哈尔滨工程大学自动化学院,哈尔滨 150001)
ROV运动控制技术综述
刘 鑫,魏延辉,高延滨
(哈尔滨工程大学自动化学院,哈尔滨 150001)
水下机器人(ROV)是人类在海洋探索和开发中的重要工具,而运动控制技术是ROV的关键技术之一,是各国研究机构的研究热点。综述了国内外主要的ROV运动控制技术,总结了ROV运动控制技术的主要研究内容及关键技术,并对ROV运动控制技术进行了展望。
水下机器人;运动控制;关键技术
海洋蕴藏着巨大的经济潜力,受到世界各国的广泛关注。随着科学技术的发展,近年来人们逐渐把注意力投向作为海洋资源开发工具的各种海洋机器人的研发中。智能海洋机器人由于在实际作业中无须人工干预,可以自主运行于难以接近和无法预知的海洋环境中,完成自主导航、自主避障和自主作业等任务,因此无论在军事还是国民经济中都有无可比拟的优越性[1]。
水下机器人(remote operated vehicle,ROV)是海洋机器人的一种,能通过人的远程操控代替人在深海环境进行作业,是一种人工智能系统,其自身具有很强的自主性、记忆性,还可根据具体的实际情况做出相应的改变[2]。操作人员只需将任务下达给ROV,实际操作全由ROV自主完成。
ROV作为一种人工智能系统,具有智能形式的运动控制技术就成为ROV技术中最为关键和重要的技术。只有解决了ROV自身的运动控制问题,才能保障机器人按照预定的指令和规划完成工作。因此,研究ROV的运动控制具有重要意义。
1 ROV运动控制技术
1.1 ROV运动控制技术的发展历程
ROV作为目前应用最为广泛的一类海洋机器人,其运动控制技术的发展与科学技术的进步紧密相连。纵观ROV的发展历史可以看出,ROV的运动控制技术的发展大致可以分为如下3个阶段:
1)模拟控制技术阶段。这个阶段为水下机器人发展的初期,大约从20世纪50年代到70年代初,处于模拟控制技术阶段。在这个阶段,ROV的运动控制系统大量采用模拟电子技术,控制系统由大量的分立元件组成。因此,电子设备体积庞大,元件数量多、功耗大、可靠性差[3]。
2)模拟-数字控制技术阶段。随着数字技术的发展,20世纪70年代开始出现采用模拟-数字混合电子技术的水下机器人运动控制系统,这其中还包括采用单片机的控制系统。数字技术和单片机的应用不仅使控制设备的体积缩小,而且使得ROV的性能和可靠性得到了提高[2-3]。
3)计算机控制技术阶段。从20世纪80年代中期以后,电子计算机技术被广泛应用于水下机器人运动控制领域,所以将这一阶段称为计算机控制技术阶段。在这一阶段,随着计算机的普遍应用和大规模集成电路技术的飞跃发展,电子元件的集成度越来越高,电子设备所占的空间大大减小[2-4]。计算机技术在 ROV中的应用促使ROV运动控制技术发生了巨大的变化,新一代的采用更新型技术的ROV已经呈现在我们面前。
1.2 国内外典型ROV及运动控制技术
国外对于ROV的研究起步比国内早,其研制始于20世纪50年代[4]。1960年,美国率先研制出世界上第一台 ROV——“CURV 1”,如图 1所示。

图1 世界上第一台ROV
1966年,“CRUV 1”与载人潜水器配合,在西班牙外海海底找到了一颗失落的氢弹,这在当时引起了极大的轰动。从此,ROV的研究得到了世界各国的重视[4]。在20世纪70和80年代,ROV进入了商业化发展阶段。在1975年,Hydro Production公司研发了第一台商业化的 ROV——“RCV-125”,其主要任务是进行水下管道的连接和水下钻井工作[5]。随后很长的一段时间,ROV主要用于军事方面,主要用于探测和销毁水雷。比较先进的有法国的“PAP104”、意大利的“PLUTO-plus”、德国的“企鹅-B3”、瑞典的“海鹰”和加拿大的“开路先锋”等[6]。
1982年,美国研制成功的“MAX Rover”ROV被正式应用于油田开发。这种ROV经过多年的发展,已经成为世界上最先进的全电力工作级ROV,潜深达3 000 m,安装有水下TV、声纳、5自由度机械手、自动导航和定位设备等,还拥有4个均衡控制的高速液压推进器,每个推进器提供113 kg的推力[7]。在1985年,Jung等[8]将滑模控制器用于水下缆控机器人的轨迹控制,并在此基础上深入研究了水动力导数的相关特性。1990年,Gewonder等[9]提出一种多变量自适应控制器,用于解决ROV在自动控制时运动模型不确定的问题。同年,日本成功研制了“KAIKO”(海沟号)ROV (图2),该机器人长3 m,重5.4 t,可以到达海洋的最深点——10 911.4 m的马里亚纳海沟。
“海沟号”的2个潜器系统发射器通过12 000 m的光纤与母船相连,再通过250 m的二级电缆与潜器相连。该潜器可以在半径200 m的范围内自由运动。“海沟号”有3个任务模式:一是通过拖曳系统调查6 500 m的海床;二是将海床的研究拓展到整个海洋;三是为 SHINKAI6500提供救援[10]。

图2 日本“KAIKO”(海沟号)ROV
1992年,Murong等[11]在对ROV进行深入的运动学分析的基础上,提出了一种非线性4自由度的跟踪控制方法,包括对水下机器人舷向、纵倾、横倾和纵向位置等4个方面的控制。在1994年,Derbtoy等研究了一种基于14个模糊规则的模糊控制器,并将其成功应用于水下缆控机器人的深度控制方面。同年,Mutu等[12]针对欠驱动的ROV开展速度和位置控制研究,通过试验验证了离线神经网络控制器、在线神经网络控制器、基于非回归的自适应控制器和模糊控制器等4种不依赖模型的运动控制系统。1998年,Yiss等[13]提出了自主神经网络控制系统,将其成功应用于舷向控制,并通过仿真试验验证了该方法的有效性。
国内对于水下机器人的研究起步于20世纪70年代末,相比欧美国家和日本处于落后水平。目前,我国比较先进的ROV是“海龙号”深海机器人,它由上海交通大学的科研团队历经9年完成。ROV一般由脐带缆连接,但是海洋是变幻莫测的,风浪常常会使脐带缆断裂,这样耗资巨大的ROV就会沉入海底。“海龙号”在前人的基础上解决了脐带缆断裂的问题,这一技术具有我国自主知识产权[14]。图3为我国目前最先进的ROV——“海龙号”。
在“海龙号”水下ROV研制成功的基础上,上海交通大学水下工程研究所就水下ROV的运动控制技术开展了如下工作:
1)对ROV动力定位系统(DP)的控制时序和事件触发逻辑进行了分析和设计。解决了包含有核心控制策略算法的动力定位系统与ROV自身水下计算机(下位机)之间的控制时序的匹配问题,以及事件触发逻辑关系的相互响应问题。此外,采用线程同步和时钟校验的方法以确保动力定位系统对通讯数据包的实时跟踪处理。
2)在“海龙号”控制系统的基础上扩展开发了一套具有虚拟监控(VMS)功能和动力定位(DP)功能的软件。此软件不仅能仿真ROV的水下作业过程,并且能实时对ROV的水下作业进行控制。
3)基于软件平台Multigen Creator和Vega开发深海潜水器近海底作业视景仿真系统。通过运用Vega视景仿真软件平台所提供的碰撞矢量方法这一先进的仿真技术,模拟安装在潜水器实体上各种声纳或传感器的功能,用以实现潜水器在深海环境下对其作业路径上障碍物的规避及对其作业路径起伏的及早预知。
2002年,中科院沈阳自动化研究所研制成功中国第一台能够进行水下作业的 ROV——“CISTAR”。随后几年,又相继地研制出“海人一号”和“金鱼三号”。沈阳自动化研究所主要在以下3方面取得进展:在虚拟三维模拟技术的基础上深入研究了水下ROV避障问题;将三维障碍物描述、避障声纳布置、避障声纳探测区域和运动控制统一起来,建立了三维水下障碍物模型,并针对不同障碍物类型采取相应的避障措施;提出了一种基于水平面模糊避障规划和垂直面模糊避障规划相结合的三维实时避障规划方法。
哈尔滨工程大学在水下ROV运动控制方面也有着突出的贡献。刘学敏教授[15]提出了一种基于PD和模糊控制的S面控制方法,并且通过试验验证了此方法的可行性。王丽荣等[16-17]在 S面控制方法的基础上提出了将sigmoid函数开方得到亚S面控制方法,用于提高控制的响应速度。甘永等[18]提出了一种并行神经网络控制器,用于解决传感器在短时间内无数据情况下的控制问题。
表1和表2分别列举了一些国内外典型的ROV参数。
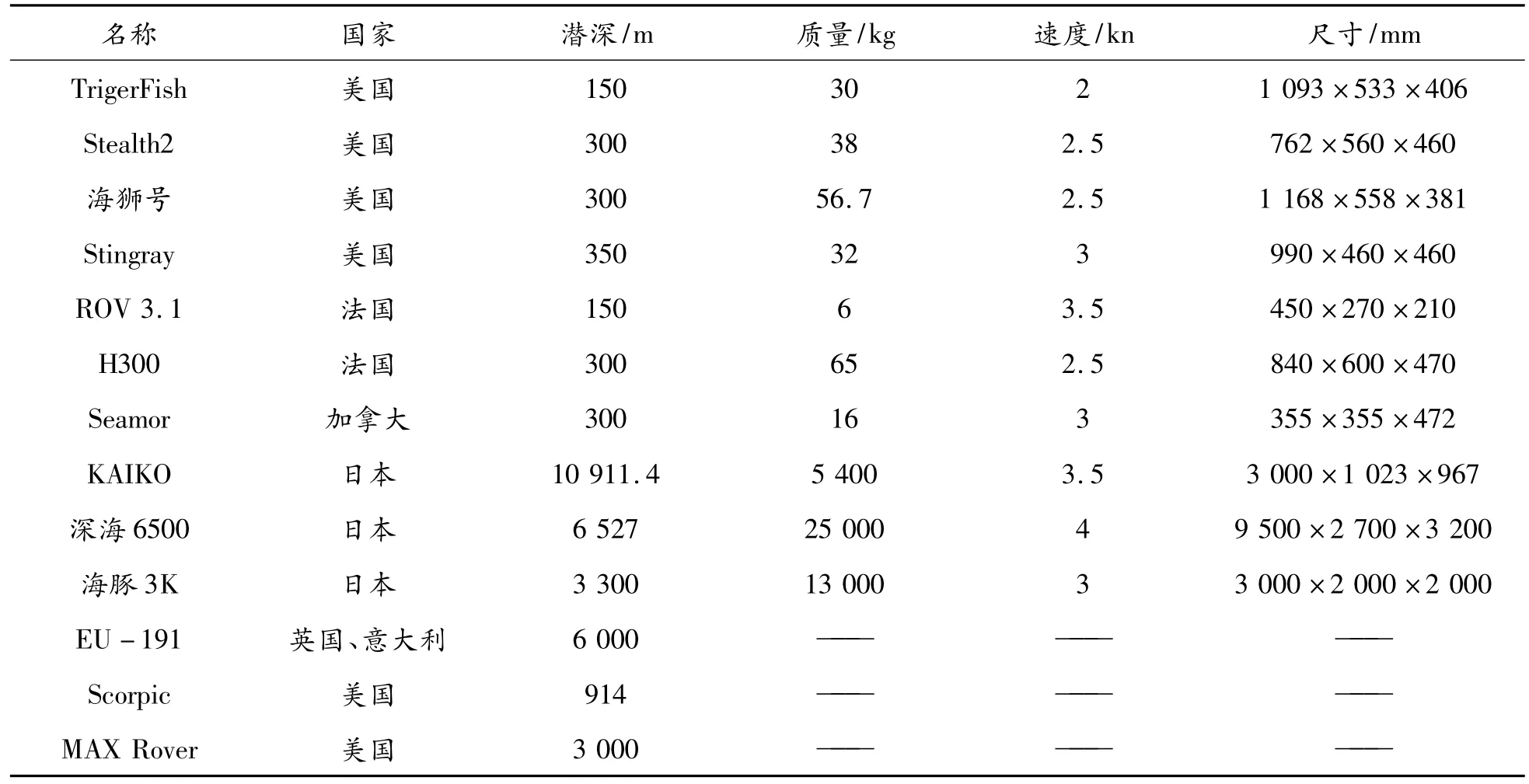
表1 国外ROV参数

表2 国内ROV参数
目前,我国正自主研发首个载人7 000 m ROV,将于2014年年底进行下水试验。
1.3 ROV运动控制技术的研究内容
在ROV的运动控制方面有两个主要的研究方向:运动控制系统的基本回路和航行控制的闭环控制算法[17]。ROV在运动状态下能够保证自身的稳定是其进行水下作业的前提,而能够精确控制ROV的运动轨迹才能保证水下机器人按照人们的意愿去工作。
1)运动控制系统的基本回路。为使问题简单化并且获得良好的控制效果,大多数ROV采用单回路闭环控制,如深度回路(定深控制)、高度回路(定高控制)、艏向角回路(定向控制)、距离回路(自动定距控制)、位置回路(自动定位控制)、速度回路(恒定航速控制)等。这里需要说明的是,ROV在实验和应用中,上述的回路会存在相互的影响,如自由度的耦合、控制时其他回路的干扰等,这些影响与执行机构的种类、执行机构的布置、机器人的运动状态等诸多因素相关。
2)航行控制的闭环控制算法(轨迹控制)。在控制的基本回路的基础上,还需要一定的控制算法才能实现对ROV运动的精确控制。常用的控制算法有PID控制、模糊控制、自适应控制、神经网络控制等[19]。
单独的某种控制算法都会有其局限性,国内外的研究人员在分析上述控制算法的基础上,为发挥不同算法的优点,正尝试将上述控制算法相结合以形成新的控制算法。
2 ROV运动控制的关键技术
总的来说,水下ROV的运动控制应主要解决如下几个问题:
1)运动控制体系和运动控制结构的设计。这个问题的解决需要与ROV实际工作特点和工作方式相结合。运动控制体系结构的设计需要从稳定性、准确性和快速性3个方面考虑。ROV实际工作环境的不同对这3个参数的要求也不同。
2)ROV在水下运动时自身的稳定控制技术。在这个方面对稳定性和快速性的要求比较高。ROV是一个动态的作业工具,在其处于运动状态时,自身的稳定控制能力是其工作的基础。在运动稳定性控制方面,着重需要考虑的是ROV在遇到突发的海流冲击情况下如何快速恢复自身的稳定状态。
3)ROV在行进间的轨迹控制和避障技术。精确的轨迹控制是ROV为人类服务的基础。而在预先的轨迹上遇到突发障碍物的情况下,如何快速地调整运动轨迹完成预先设定的任务是研究的重点。在这个方面对ROV运动控制的快速性和准确性要求比较高。
目前,国内针对上述ROV运动控制的比较典型的研究成果如下:
1)基于信息流的ICE基础运动控制方法。这是一种针对信息流依次经过水下机器人的信息层(information)、控制层(control)、执行层(execute)所建立的一种水下缆控机器人ICE基础运动控制体系结构,是一个完善的基础运动控制体系,能为高层智能规划系统提供所需的信息,获得精确的运动控制能力[20]。
在ICE基础运动的基础上提出一种基于三点滚动的野点剔除法,能实现对采样频率较高的传感器数据的野点剔除。该方法解决了光纤陀螺数据由野点数据引起的积分误差问题,使光纤陀螺积分测得的艏向角满足了ROV的设计要求[20]。同时将定向、定深及悬停的基本控制回路及控制策略应用到了水下机器人的控制上,通过对实验数据曲线的分析,验证了定深、定向及悬停的基本控制回路及控制策略的可行性。
2)S面控制器。早在2001年就已经有人提出工程中比较实用的S面控制器。该控制器结合了PD控制的简单结构和模糊控制的基本思想。它不仅可以简化控制器的设计环节,而且可以有效减少控制器的调节参数,最终保证水下机器人非线性控制的控制效果。但是这个控制器不具备自学习功能[21]。为了给S面控制器增加自学习的能力,使得控制器具有更好的性能,有科研人员在S面控制器中引入了神经网络的自学习功能,借鉴神经网络的误差反向传播算法来改善水下机器人控制性能。而后李烨等[22]将遗传算法引入到S面控制器中,利用遗传算法优化S面的控制参数,从而降低控制器设计过程中存在的主观影响。
3 ROV运动控制技术的发展前景
1)向高稳定性方向发展,抗干扰能力不断加强。ROV技术经过多年的研究,各项技术正在逐步走向成熟。ROV技术的发展将致力于提高观察能力和顶流作业能力,加大数据处理容量,提高操作控制水平和操纵性能,完善人机交互界面,使其更加实用可靠。
2)在稳定性的前提下,不断提高ROV水下工作的效率(快速性和准确性)。未来各国之间对海洋资源的争夺必将是激烈的。在相同的工作时间内,尽可能提高ROV水下工作的效率,是对运动控制方法的一大考验[23]。
3)尽可能提高深海的稳定工作时间。地球上97%的海洋深度在6 000 m以上,称之为深海。随着海洋油气等资源的开发走向深海,必然要求ROV向更大作业深度发展。如今,世界各国都在加大力度研制潜深超过6 000 m的深水ROV。但目前世界上能够在深海保持稳定的工作状态的ROV的工作时间不超过5 h。所以,真正提高ROV在深海的稳定工作时间是未来的一大控制难题。
4)对新概念ROV的有效控制[24]。多媒体技术、临场感技术及虚拟现实技术等新型技术在ROV中的应用将产生新一代全新概念的ROV。如何有效控制新概念的ROV,使其更好地为人类服务,也是今后的技术难点。
[1] 徐玉如,肖坤.智能海洋机器人技术进展[J].自动化学报,2007,33(5):518-521.
[2] 姚峰.水下机器人基础运动控制体系结构及运动控制技术研究[D].哈尔滨:哈尔滨工程大学,2012:1-10.
[3] 蒋新松,封锡盛,王棣文.水下机器人[M].辽宁:辽宁科学技术出版社,2000:238-241.
[4] 许竞克,王佑君,侯宝科,等.ROV的研发现状及发展趋势[J].四川兵工学报,2011(4):71-74.
[5] 刘朝俊.遥控潜器的现状与未来[J].国外舰船工程,2003(5):40-44.
[6] 张文瑶,裘达夫,胡晓棠.水下机器人的军事发展、应用及启示[J].中国修船,2006(19):37-39.
[7] 兰志林,周家波.无人水下航行器发展[J].国防科技,2008,29(2):13-15.
[8] 封锡胜,刘永宽.自治水下机器人研究与开发的现状与趋势[J].高技术通讯,1999(9):55-59.
[9] 晏勇,马培荪,王道炎,等.深海ROV及其作业系统综述[J].机器人,2005(1):82-89.
[10]彭学伦.水下机器人的研究现状与发展趋势[J].技术应用.2004(4):88-91.
[11]李晔.微小型水下机器人运动控制技术的研究[D].哈尔滨:哈尔滨工程大学,2007,1-31.
[12]张子迎.水下机器人运动控制方法研究[D].哈尔滨:哈尔滨工程大学,2005:10-41.
[13]张磊.基于Agent的水下机器人运动控制系统体系结构[D].哈尔滨:哈尔滨工程大学,2010,12-32.
[14]桑方恩,庞永杰,卞红雨.水下机器人技术[J].机器人技术与应用,2003(3):8.
[15]郭冰洁.微小型水下机器人运动控制[D].哈尔滨:哈尔滨工程大学,2008:9-27.
[16]王建国.水下机器人运动控制与故障诊断研究[D].哈尔滨:哈尔滨工程大学,2011:1-21.
[17]刘春媚.遥控式水下机器人运动控制技术的研究[D].哈尔滨:哈尔滨工程大学,2007:1-20.
[18]甘永.水下机器人运动控制系统体系结构的研究[D].哈尔滨:哈尔滨工程大学,2007:11-20.
[19]温秀萍.水下机器人特性分析及其控制方法研究[D].哈尔滨:哈尔滨工程大学,2012:1-21.
[20]Liu Zhishen,Ding Tianfu,Wang Gang.ROV Based Underwater Blurred Image Restoration[J].Journal of Ocean University of Qingdao,2003(1):85-88.
[21]王磊,杨申申,徐鹏飞,等.一种新型水下机器人的研究与开发[J].中国造船,2010(1):122-130.
[22]袁晓宇.一种基于PID算法的ROV运动控制的研究[J].自动化博览,2012(7):76-79.
[23]李晓东.缆控水下机器人的定位和运动[J].水雷战与舰船防护,2009(1):66-69.
[24]梁霄.微小型水下机器人运动控制及可靠性研究[D].哈尔滨:哈尔滨工程大学,2009:1-27.
(责任编辑 刘 舸)
Review of ROV Motion Control Technology
LIU Xin,WEI Yan-hui,GAO Yan-bin
(School of Automation,Harbin Engineering University,Harbin 150001,China)
Remote operated vehicle(ROV)is an important tool for human in ocean exploration and development.Motion control technology is one of the key technology of the ROV and becomes a hotspot of research.This paper describes the main ROV motion control technology at home and abroad,summarizes the ROV motion control technology,the main research contents and key technologies,and discusses the research prospect of ROV motion control technology.
remote operated vehicle;motion control;key technology
TP24
A
1674-8425(2014)07-0080-06
10.3969/j.issn.1674-8425(z).2014.07.016
2013-12-28
国家自然科学基金资助项目 (51205074);高等学校博士学科点专项科研基金资助项目(20112304120007);黑龙江省教育厅博士后研究人员科研启动基金资助项目(LBH-Q10129);哈尔滨市科技创新人才研究专项资金资助项目(RC2012QN009037);中央高校基本科研业务费专项资金资助项目(HEUCFR1011)
刘鑫(1990—),男,江苏盐城人,硕士研究生,主要从事水下ROV的运动控制方法及水下ROV运动避障问题研究。
刘鑫,魏延辉,高延滨.ROV运动控制技术综述[J].重庆理工大学学报:自然科学版,2014(7):80-85.
format:LIU Xin,WEI Yan-hui,GAO Yan-bin.Review of ROV Motion Control Technology[J].Journal of Chongqing University of Technology:Natural Science,2014(7):80-85.
猜你喜欢
煤气与热力(2021年12期)2022-01-19
速读·中旬(2021年2期)2021-07-23
校园英语·上旬(2019年9期)2019-09-16
建材发展导向(2019年13期)2019-08-24
电子制作(2019年7期)2019-04-25
大陆桥视野(2016年12期)2016-12-27
照明工程学报(2016年3期)2016-06-01
电测与仪表(2014年1期)2014-04-04
筑路机械与施工机械化(2014年4期)2014-03-01
自动化博览(2014年9期)2014-02-28
