
某电控液压助力转向器的助力特性研究
2014-06-27 05:46杨翔宇王杰苏道齐
重庆理工大学学报(自然科学) 2014年1期
杨翔宇,王杰,苏道齐
(重庆理工大学车辆工程学院,重庆 400054)
某电控液压助力转向器的助力特性研究
杨翔宇,王杰,苏道齐
(重庆理工大学车辆工程学院,重庆 400054)
电控液压助力转向系统(EHPS)具有随速可变的助力特性。在深入了解某型号EHPS助力转向器基本结构、设计尺寸的基础上,对其工作原理进行详细分析;同时,建立了该EHPS的数学模型,推导出了该助力转向器的助力与转阀的设计参数之间的理论公式;通过仿真计算,得出其理论助力特性曲线,为新的助力转向装置的设计和匹配提供了依据。
电控液压助力转向器;转阀;仿真;助力特性
汽车转向系统是影响汽车动态性能的重要系统,助力转向系统的匹配分析是汽车研发中的一个重要课题[1]。传统的液压助力转向系统(HPS)提供的助力不能随车速调节,无法兼顾助力需求较大的原地工况和助力需求较小的行驶工况,往往造成“原地沉重,高速发飘”的助力手感,从而影响了助力转向的准确性和舒适性。为解决这一难题,要求助力能随着车速的变化而改变,即具有可变的助力特性,采用电控液压助力转向系统(EHPS)可以实现此要求。
国内对电动液压助力转向系统的研究起步较晚。清华大学和天津大学曾研究过电动泵式电控液压助力转向系统,分析了其控制策略和控制方法[2]。郭晓林、季学武等对EHPS系统的等效通流面积进行了深入研究,针对不同转阀阀口的形状,研究了转阀节流面积与扭转角度之间的关系,并对其静态和动态特性进行了分析[3-5]。国内一些厂家也对EHPS系统进行了研究,但成熟的技术产品很少。由于国外对EHPS的关键技术进行保密,故涉及文献很少。
本文在深入了解某型号EHPS助力转向器基本结构、设计尺寸的基础上,从油路流通的角度描述并分析助力转向器的工作原理;同时根据建立的模型,计算了理论上的助力特性。
1.EHPS系统的组成及工作原理
1.1 EHPS的优势及组成
实现液压助力随速可变的功能有3种方法:①改变流入转阀的流量;②改变扭力杆的刚度;③改变转阀的通流面积。因此,EHPS系统可分为流量控制式、反力控制式和阀特性控制式等多种形式[6-7]。
电动助力转向系统(EPS)采用电机提供助力,通过ECU控制,助力大小容易根据车速大小调节,目前应用也越来越广泛。但EPS系统由于电机功率的限制,只适合在整备质量2吨以下的乘用车上应用,对于前轴重量更大的车型则无能为力。同样,电子泵式EHPS也存在类似的功率问题。
该EHPS助力转向器最大的优势在于助力大,由发动机提供驱动力,且助力手感随车速可变。通过对助力特性的精确设计,为驾驶者提供不同的手感反馈,凸显车型驾控特性,给操控者带来更多的驾驶乐趣。
该系统是由机械转向装置、液压助力装置和电液控制装置3个子系统组成的齿轮齿条式转向器,其基本组成如图1所示。机械转向装置包括方向盘、转向柱、扭杆、转向器、转向架和车轮悬架等;液压助力装置包括液压缸、由发动机驱动的恒流液压泵、储油罐和转阀;电液控制装置包括电子速率计(车速信号也可由ABS系统直接导入控制单源)、电液转换器和旁通阀。
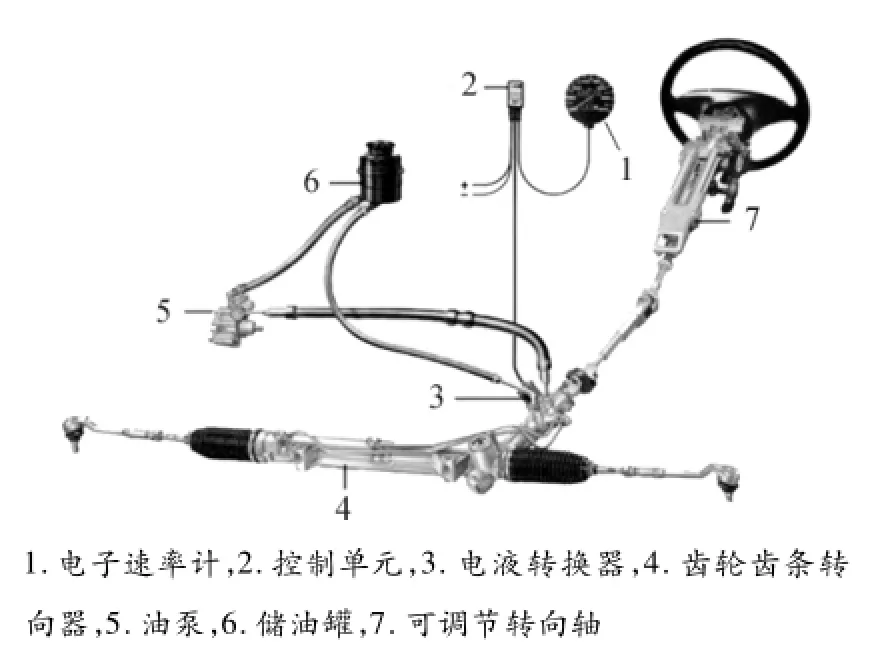
图1 EHPS系统的组成
由于系统采用了由发动机驱动的恒流液压泵,保持了机械液压助力系统的高负载能力和高可靠性等优势,尤其适合对转向系统的负载能力要求较高且需要精准操控性的车型。
1.2 EHPS的工作原理
当汽车低速行驶时,电液转换器关闭,液压油只通过转阀流通,这时系统的工作状态与传统的液压助力系统一样;随着车速的提高,ECU控制电液转换器逐渐开启,此时液压旁路逐渐打开,流入转阀的流量减小,流入液压旁路的流量增大,从而改变油缸两端的压力,相应的助力也随之改变;当车速超过预定值时,液压旁路完全打开,液压油经旁路流回储油罐,转阀中没有液压油流动,油缸两端压力平衡,不提供助力。此时,相当于一个纯机械式转向器,保证了驾驶员有良好的路感。该EHPS原理框图如图2所示。
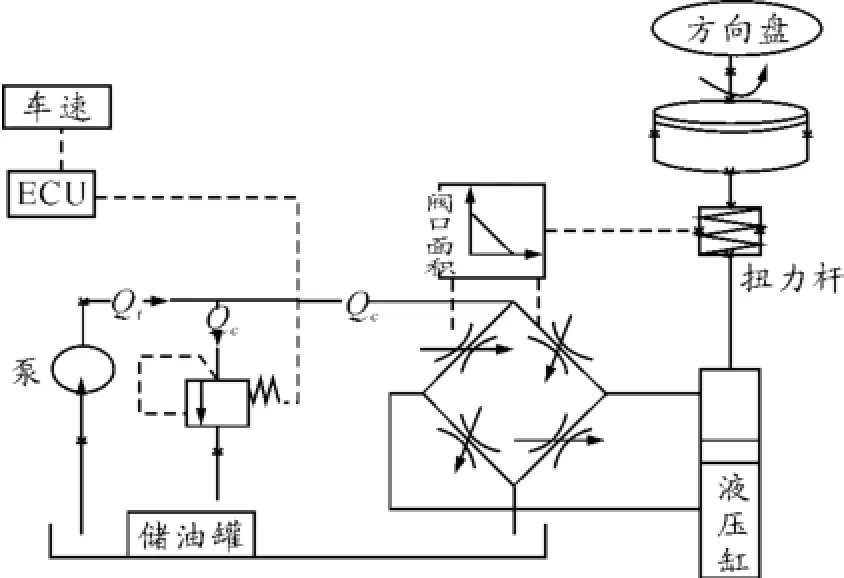
图2 EHPS系统的工作原理

图2中 Qt代表液压泵的供油量;QC代表流入转阀的油量;Qe代表流入旁通油路的油量。通过电液转换器控制QC与Qe的比例关系,进而提供合适的助力。
2 EHPS助力转向器模型的建立
为了形象地表示该EHPS助力转向器的助力特性,将建立主要部件的模型。
2.1 扭力杆模型的建立
扭力杆是转阀中不可或缺的弹性元件,在转阀回正中起关键作用,其材料大多为40Cr。扭力杆的上端通过销孔与输入轴相连,下端通过销孔与小齿轮相连。扭力杆结构简图如图3所示。

图3 扭力杆结构简图
根据实心圆截面扭杆的扭矩计算公式,可得在扭矩作用下扭力杆的弹性变形公式为

式(2)中:M为扭力杆受到的扭矩(N·M);d为扭力杆的有效直径(mm);l为扭力杆的有效长度(mm);G为扭力杆的剪切弹性模量,与材料性能有关,一般取80 GPa;φ为扭力杆的相对转角,转化为角度表示。
扭力杆的刚度特性可以通过调整其几何参数和材料进行改动,从而调整系统的助力特性和方向盘上的手力特性。
2.2 转阀模型的建立
转阀是决定整个转向器性能的关键部件,控制着液压油的流动方向。简化后的转阀工作原理如图4所示。图中:5为扭力杆,6为阀套。当转向盘处于中间位置时,扭力杆无转动,流入阀口1和阀口4的液压油流量相同,此时液压缸两端无压力差,液压系统不工作。
当转动方向盘时,以逆时针转动为例,转向器输入轴带动阀芯6转动,阀芯6带动与之相连的扭力杆5的顶端转动,扭力杆5再带动小齿轮转动。由于小齿轮通过齿条及转向横拉杆与转向节相连,而转向节受到轮胎与地面的摩擦力,使得阀套7不能转动。因此,扭力杆两端就在转向力矩作用下形成了一个扭转角,使得阀芯6与阀套7之间也有一个相对转角。这样,流入阀口1中的流量增加,流入阀口4中的流量减小,从而在转阀内形成压力变化,导致液压缸两端的压力变化,助力形成。

图4 转阀工作原理图
2.3 转阀阀口模型的建立
助力转向器的阀口大致分3种:简单刃口阀、加工长坡口的转阀和加工短切口的转阀[8-9]。该转向器的转阀阀口是简单刃口阀,其剖面如图5所示。

图5 阀口的剖面图
R代表阀芯半径,Amax代表预开间隙完全关闭的角度,a代表预开间隙宽度,b代表孔口瞬间宽度,w代表孔口轴向长度,则等效通流面积A可由式(3)求得。

3 转阀中压力变化公式的推导
在图4中,4个可变的阀口相当于4个可变的液阻,整个转阀相当于3个并联的3位4通通道。该原理图可以进一步等效为惠更斯桥路[10],如图6所示。

图6 转阀的等效液压回路
图6中:Qc为流入转阀的流量;Q1~Q4为流入各阀口的流量;QL为流入负载的流量;Pa、Pb为负载两端的压力。
推导过程中,假设液压油是不可压缩的,且在流动过程中不计内泄露和沿途压力损失。根据桥路的压力平衡可得:

根据桥路的流量平衡可得:

则桥臂的流量-压力方程是:

Ai( 1,2,3,4)表示各桥臂的节流面积,而节流面积又随阀芯转角φ变化而变化。因转阀是对称结构,故:

由式(2)~(15)可得:

流经转阀各阀口油液的流量与压力差的关系可以按照薄壁小孔流量的计算公式进行计算[11],即

式(20)中:Δp为阀口两侧的压力差;Cd为流量系数;ρ为液压油密度。
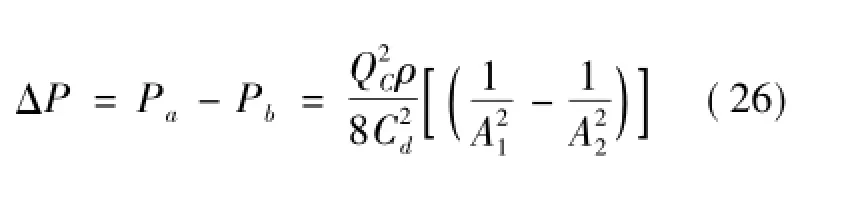
由式(18)~(20)可得:
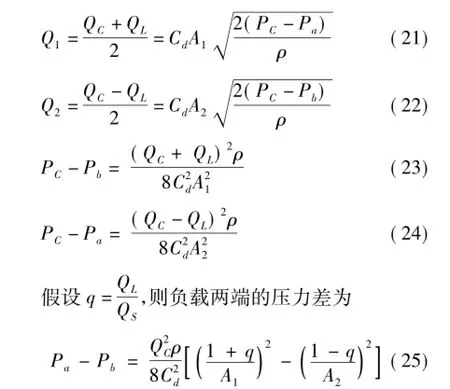
在静态条件下,液压缸中的活塞不移动,故QL的初始值为0。可得该转向器的静态助力计算公式为
4 EHPS助力转向器的仿真及结果分析
4.1 各参数的选取
系统额定压力为14 MPa,模型的初始参数如下:Qt=16 L/min,ρ=900 kg/m3,Cd=0.6,w=20 mm,a=5 mm,R=11 mm,l=70 mm,d=4.6 mm。
4.2 仿真及结果分析
联合式(1)、(2)、(3)、(26),在Matlab中进行仿真。仿真过程中,假设电液转换器的开度逐渐增大,计算旁通流量Qe(L/min)取值分别为0、4、8、12时扭矩与油压压力的关系,其仿真结果如图7所示。
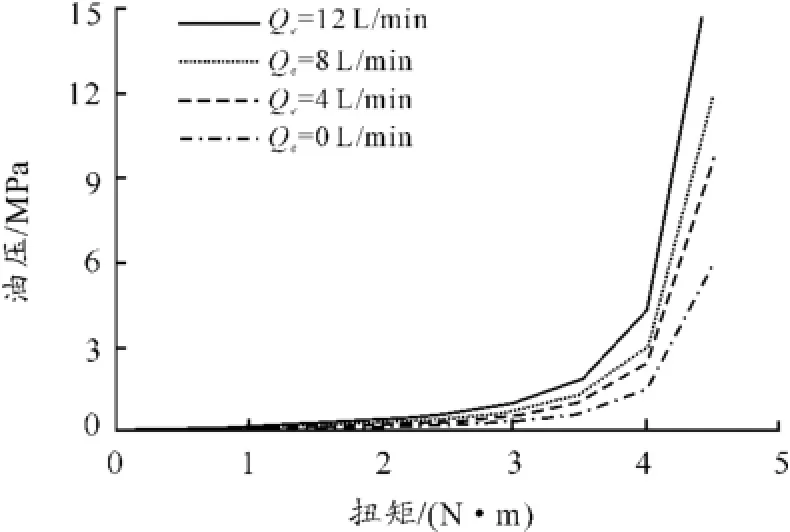
图7 扭矩与油压压力的关系
从图7可以看出:在相同扭矩下,随着车速的增大,Qe取值随之增大,助力系统提供的液压压力逐渐降低;在相同的液压压力下,随着车速增大,转动方向盘所需要的方向盘转矩也逐渐增大。这符合低速大助力、高速小助力的趋势,满足了汽车的操作稳定性。
在图7中,曲线有明显的尖端。由于液流的惯性等因素,实际关系曲线为理论曲线的近似切线。另外,由于仿真模型采用了简单刃口阀,曲线的上升趋势比较陡,如果采用加工长坡口的阀口模型,其上升趋势会比较平缓。对于该助力转向器,将在接下来的台架实验中进一步详细研究。
5.结束语
本文通过建立某型号EHPS助力转向器的数学模型,从理论上验证了该助力转向器可以提供比较理想的助力特性,为下一步台架试验提供了理论指导,也为大功率助力转向器的开发奠定了一定的基础。
[1]林秉华.最新汽车设计实用手册[M].哈尔滨:黑龙江人民出版社,2005.
[2]陈勇,何仁.电动液压助力转向系统仿真及实验研究[J].液压与气动,2009(10):29-32.
[3]Guo Xiaolin,Ji Xuewu,Liu Yahui,et al.Study on Dynamic Responses of the vehicle Handing Models with a Speed-sensitive Hydraulic Power Steering System[J]. Training,2013:10-11.
[4]高峰,刘亚辉,季学武.电控液压助力转向系统的初步匹配[J].北京航空航天大学学报,2007,33(5):605-607.
[5]Wolfgang KemmetmüllerModeling and Nonlinear Control of an Electro-hydraulic Closed center Power-steering System[C]//Proceeding of the 44th IEEE Conference on Decision and Control.[S.l.]:[s.n.],2005:5077-5082.
[6]毕大宁.汽车转阀式动力转向器的设计与应用[M].北京:人民交通出版社,1998.
[7]陈峰,何仁,刘文光,等.前轴载荷对电动客车EHPS系统的助力与节能性的影响[J].重庆理工大学学报:自然科学版,2013,27(10):16-19.
[8]曾迥立,刘嵘.汽车动力转向器任意切边矩形阀口压力静特性的计算分析[J].汽车技术,2003(12):14-16.
[9]高翔,王若平.短切口旋转控制转阀特性的仿真研究[J].机床与液压,2005(11):68-69.
[10]Aly Badawy,Dieter Fehlings.Developmentof a New Concept of Electrically Powered Hydraulic Steering[J].SAE transactions,2004,113(6):1074-1081.
[11]谭心,陈超,方桂花,等.汽车电动液压助力转向系统的仿真分析[J].液压与气动,2013(1):15-19.
(责任编辑 刘舸)
Assistance Characteristics of Electronic Hydraulic Power Steering
YANG Xiang-yu,WANG Jie,SU Dao-qi
(School of Vehicle Engineering,Chongqing University of Technology,Chongqing 400054,China)
Electronic hydraulic power steering system(EHPS)has an alterable assistance characteristic which is adapted to vehicle speed.Based on the analysis of the structure and design parameters of an EHPS system,the working principle was elaborated.Then themathematicalmodel was built,and the theoretical formulas between the power steering assistand the design parameterswere derived.The theoretical curves of assistance characteristics can be obtained by computer simulation,which lays the foundation for the design and choice of new power steering system.
electronic hydraulic power steering;rotary valve;simulation;assistance characteristics
U463.4
A
1674-8425(2014)01-0012-05
10.3969/j.issn.1674-8425(z).2014.01.003
2013-09-21
重庆市科技攻关计划资助项目(CSTC.2009AB6021);重庆理工大学研究生创新基金资助项目(YCX2012201)
杨翔宇(1953—),男,重庆人,教授,硕士生导师,主要从事车辆传动技术及应用研究。
杨翔宇,王杰,苏道齐.某电控液压助力转向器的助力特性研究[J].重庆理工大学学报:自然科学版,2014 (1):12-16.
format:YANG Xiang-yu,WANG Jie,SU Dao-qi.Assistance Characteristics of Electronic Hydraulic Power Steering[J].Journal of Chongqing University of Technology:Natural Science,2014(1):12-16.
猜你喜欢
装备制造技术(2022年7期)2022-10-21
玩具世界(2022年1期)2022-06-05
橡塑技术与装备(2022年6期)2022-06-02
塑料包装(2020年4期)2020-09-24
塑料包装(2020年1期)2020-04-09
电动工具(2016年6期)2016-12-22
兵器装备工程学报(2015年8期)2015-05-06
筑路机械与施工机械化(2015年4期)2015-04-22
浙江大学学报(工学版)(2015年6期)2015-03-01
科技视界(2014年23期)2014-12-25
