低快拍下MIMO雷达收发角度联合估计方法
2014-06-23 13:52王咸鹏马跃华王君祥
哈尔滨工程大学学报 2014年9期
王咸鹏,王 伟,马跃华,王君祥
(哈尔滨工程大学 自动化学院,黑龙江 哈尔滨150001)
低快拍下MIMO雷达收发角度联合估计方法
王咸鹏,王 伟,马跃华,王君祥
(哈尔滨工程大学 自动化学院,黑龙江 哈尔滨150001)
在多输入多输出(MIMO)雷达中,基于二阶统计特性的子空间角度算法在低快拍条件下的估计性能急骤下降,甚至在单快拍时失效。针对该问题,提出一种扩展阵列孔径的二维联合空间平滑多目标波离方向(DOD)和波达方向(DOA)估计方法。该算法对MIMO雷达的发射端和接收端进行二维联合空间平滑,并利用MIMO雷达虚拟阵列的旋转不变特性对阵列孔径进行扩展,然后根据ESPRIT算法获得目标的DOD和DOA,且DOD和DOA自动配对。与基于二阶统计特性的子空间算法相比,且所提算法在低快拍条件下具有更加优越的角度估计性能,因所提算法能够适用于单快拍条件。仿真结果表明了所提方法的有效性和优越性。
MIMO雷达;双基地;角度估计;空间平滑;孔径扩展
多输入多输出(multiple-input multiple-output,MIMO)雷达是最近几年国际雷达领域界提出的一种新体制雷达,目前已经成为雷达界的一个热点研究问题[1-3]。与传统的相控阵雷达相比,MIMO雷达利用多个发射阵元发射相互正交的波形,并利用多个接收阵元接收回波信号,同时利用发射信号的波形分集对接收信号进行联合处理,具有更多的自由度、更高的空间角度分辨以及更好的角度估计性能等优点。根据MIMO雷达的收发阵列结构,将MIMO雷达分为两大类:统计MIMO雷达[2]和相干MIMO雷达[3]。统计MIMO雷达的收发阵列为分布式配置,从不同方向对空间目标进行观测获得空间分集,从而可以抑制目标的闪烁特性。相干MIMO雷达(双基地MIMO雷达和单基地MIMO雷达)的收发阵列采用集中式配置,发射阵元和接收阵元的间距一般小于或等于半个波长。相干MIMO雷达利用发射波形的正交性对接收信号进行处理,获得一个大孔径的虚拟阵列,因此具有更高的角度分辨率和更多的自由度。本文是对双基地相干MIMO雷达展开研究。
目前对于MIMO雷达的研究主要集中在波形设计[4],波束合成[5],角度估计[6]以及目标成像[7]等方面。针对角度估计问题,在双基地MIMO雷达中,由于接收信号同时包含目标的波离方向(direction of departure,DOD)和波达方向(direction of arrival,DOA),因此可以估计出目标的DOD和DOA。目前,针对MIMO雷达的DOD和DOA估计问题,已经提出了一些算法[8-12]。文献[8-9]提出了基于二维空间谱搜索(Capon,MUSIC)的DOD和DOA估计方法,但这些算法运算复杂度高。为了降低运算复杂度,文献[10-11]将旋转不变子空间算法 (ESPRIT)分别应用在MIMO雷达的发射阵列和接收阵列,不需要空间谱搜索实现了MIMO雷达的DOD和DOA估计。文献[12]利用多级维纳滤波器的前向递推获得MIMO雷达的信号子空间,避免了协方差矩阵的特征值分解,进一步降低了运算复杂度。令一方面,文献[13-14]将非圆信号考虑到MIMO雷达中,并提出了共轭旋转不变子空间算法(conjugate ESPRIT,C-ESPRIT),C-ESPRIT算法提高了目标的角度估计性能同时能够探测更多的目标。但以上这些算法都是基于接收信号的二阶统计特性,在低快拍下角度的估计性能会严重下降,甚至在单拍时失效。空间平滑算法[15]是一种低快拍下有效的预处理方法,但是以损失阵列孔径为代价。本文提出一种扩展阵列孔径的二维联合空间平滑DOD和DOA联合估计算法,该算法通过对收发阵列进行二维联合空间平滑,并利用MIMO雷达虚拟阵列的旋转不变特性进行阵列扩展,提高了角度的空域分辨。
1 信号模型
双基地MIMO雷达的结构如图1所示,发射阵列和接收阵列分别由M个阵元和N阵元的均匀线性阵列构成,且所有的阵列天线均为全向天线,发射和接收阵元距分别表示为dt和dr,图1。

图1 双基地MIMO雷达结构框图Fig.1 Principle diagram of bistatic MIMO radar
发射阵列同时发射一组相互正交的信号,且假设信号的多普勒频移对信号正交性没有影响。假设存在P个相互独立的目标,且第p个目标的空间位置为(φp,θp),其中φp和θp分别表示目标的DOD和DOA,则接收端接收的回波可表示为[12]

式中:ar(θ) = [1 ej(2π/λ)drsinθ… ej(2π/λ)(N-1)drsinθ]T为N×1维的接收阵列导向矢量,λ为载波的波长;at(φ) = [1 ej(2π/λ)dtsinφ… ej(2π/λ)(M-1)dtsinφ]T为M ×1维的发射阵列导向矢量;ap和ej2πfp(t)分别为第p个目标的散射系数和多普勒频率;S(t)=[s1(t) … sM(t)]T为 M ×1的正交发射波形;n(t)为N×1的零均值高斯白噪声。利用发射波形的正交性与接收信号进行匹配滤波处理,那么第m(1≤m≤M)个匹配滤波器的输出可以表示为

式中:Ar(θ)= [ar(θ1) … ar(θP)]为M×P发射导向矩 阵;Dm= diag(atm(φ1) … atm(φP)), 其 中atm(φ) 为 at(φ) 中 的 第 m 个 元 素,H(t) =[a1ej2πf1(t)… aPej2πfP(t)]T为匹配滤波后的信号矩阵,n-k(t)为经过第m个匹配滤波器后的高斯白噪声矢量。经过M个匹配滤波器后,阵列信号可表示为

对式(3)进行列堆栈,则有

式中: A(φ,θ) = [a(φ1,θ1) … a(φP,θP)] 为MN×P维的发射-接收联合导向矩阵;a(φ1,θ1)=at(φ)⊗ar(θ)为MN×1的发射-接收联合导向矢量, ⊗ 表 示 Kronecker 乘 积; N(t) =为MN ×1维的高斯白噪声矢量。在快拍数为K时,接收数据可表示为

2 低快拍下收发角度联合估计方法
在本节中,首先对MIMO雷达的收发阵列进行二维联合空间平滑预处理,推导出MIMO雷达虚拟阵列的旋转不变特性,并对阵列孔径进行扩展;然后给出阵列孔径扩展后的DOD和DOA估计的过程,最后总结该算法的具体实现步骤和给出双基地MIMO雷达角度估计的克拉美罗界(CRB)。
2.1 二维联合空间平滑算法
根据MIMO雷达发射-接收导向矢量的结构,对MIMO雷达的收发阵列进行二维联合空间平滑预处理,在单快拍条件下获得接收数据矩阵Yss(t)。令二维联合空间平滑后发射阵元数和接收阵元数分别为Msub和Nsub,则发射端和接收端的平滑次数分别满足LM=M-Msub+1和LN=N-Nsub+1。那么MIMO雷达的二维联合空间平滑矩阵可表示为

式中:

利用空间平滑矩阵对单快拍接收信号进行处理,则Yss(t)可表示为

式中:

Λ = diag(H(t)) 为信号矩阵, Nss(t) 为MsubNsub×LMLN维的高斯白噪声。
根据式(8)进行二维联合空间平滑后,新的发射-接收导向矩阵为

在快拍数为K时,利用空间平滑矩阵对每拍接收信号进行处理,则

式中:Xss(t)为K拍接收数据经过二维联合空间平滑预处理后的数据矩阵,Λ = [Λ(1),…,Λ(K)] ,其中Λ(i)=diag[H(ti)],(1≤i≤K)为第i拍的信号矩阵,[Nss(t1),…,Nss(tK)] 。
由式(10)、(11)可知,对接收数据进行二维空间平滑处理后,MIMO雷达的虚拟阵列由Msub个发射阵元和Nsub个接收阵元组成。由于Msub<M和Nsub<N,因此MIMO雷达虚拟阵列孔径和自由度均损失,直接将ESPRIT算法应用到数据矩阵Xss(t)进行DOD和DOA估计的性能下降。下面利用MIMO雷达虚拟的旋转不变特性对阵列孔径进行扩展,获得一种扩展孔径的二维空间平滑算法。
2.2 扩展阵列孔径的二维空间平滑算法
定义1 若一个线性阵列q×q维的导向矩阵A满足IIqA*=AΩ,其中IIq为q×q维的反对角置换矩阵,它的反对角线上元素全为1,其他位置元素全为0,Ω为酉对角矩阵,即满足ΩHΩ =Ω-1Ω,则称该线性阵列为centro-symmetric阵列,具有旋转不变特性。
命题1 MIMO雷达的虚拟阵列具有旋转不变特性。
证明 根据式(4)中MIMO雷达的发射-接收导向矩阵的结构,则

对接收信号进行二维联合空间平滑预处理后,式(11)中矩阵Asub和矩阵满足:

式中:=diag[exp[-j(2π/λ)((Nsub-1)drsin θ1+(Msub-1)dtsinφ1)],…,exp[-j(2π/λ)((Nsub-1)drsinθP+(Msub-1)dtsinφP)]],=diag exp[-j(2π/λ)((LN-1)drsinθ1+(LM-1)dtsinφ1)],…,exp[-j(2π/λ)((LN-1)drsinθP+(LM-1)dtsinφP)])。
由式(13)和命题1可知,矩阵Asub和均具有旋转不变特性。利用矩阵Asub和的结构对二维联合空间平滑预处理后的数据矩阵Xss(t)进行扩展,则
式中:AE是MIMO雷达一个新的发射-接收导向矩阵,其维数为 2MsubNsub×P。通过对数据矩阵Xss(t)进行扩展后,MIMO雷达的虚拟阵元数由原来的MsubNsub增加到2MsubNsub,即扩展了MIMO雷达的虚拟阵列孔径,增加了其自由度。扩展后接收数据XE的协方差矩阵为


式中: Φt= diag(e-j(2π/λ)dtsinφ1,…,e-j(2π/λ)dtsinφP) ,即对角矩阵Φt包含所求的DOD角度信息。将发射-接收导向矩阵AE进行另外分割为:AE3=D3AE和 AE4=D4AE,其中和分别为选择矩阵,diagMsub[INsub-1,O(Nsub-1)×1],diagl[r]表示一个 l块的块对角矩阵,每块元素为r。则AE3和AE4存在如下旋转不变特性:

式中: Φr= diag(e-j(2π/λ)drsinθ1,…,e-j(2π/λ)drsinφP) ,即对角矩阵中Φr包含所求的DOD角度信息。由式(16)和(17)可知,对于DOD和DOA的求解关键在于对对角矩阵Φt和Φr的求解。信号子空间和发射-接收导向矩阵的关系可表示为:Us=AET。结合Us=AET、式(16)、(17),则

式中:Ψt=T-1ΦtT,Ψr=T-1ΦrT。 Ψt和Ψr可通过对式(18)进行最小二乘法或总体最小二乘法求解获得,同时注意到Ψt和Ψr具有相同的特征向量,因此利用特征向量实现DOD和DOA的自动配对。令为Φt的估计值,则对Ψt进行特征值分解可表示为



2.3 算法步骤及克拉美罗界(CRB)
综上所述,将所提的低快拍下MIMO雷达的收发角度联合估计算法步骤总结如下:
1)利用发射信号波形的正交性对接收信号进行匹配滤波,获得式(5)的信号数据矩阵X(t);
2)对接收数据X(t)的预处理获得式(11)的数据矩阵Xss(t);
3)根据式(14)对数据矩阵Xss(t)进行扩展,获得扩展阵列孔径后的数据矩阵XE;根据式(15)计算XE的协方差矩阵RE,并对其进行特征值分解获得信号子空间Us;
4)对式(18)进行求解获得矩阵 Ψt和 Ψr,对Ψt进行特征值分解获得对角矩阵 ^Φt,并根据式(20)求解对角矩阵
根据文献[16],给出双基地MIMO雷达的角度估计CRB为

其中,dp(p= 1,2,…,P)为dp= at′(φ)⊗ar(θ)+at(φ)⊗ar′(θ),at′(φ)= ∂at(φ)/∂φ,ar′(φ)= ∂ar(φ)/∂θ。
3 算法仿真及性能分析
下面对所提算法的有效性和优越性进行仿真和分析。在仿真中,将所提算法的角度估计性能与文献[10]的ESPRIT算法、将ESPRIT算法应用到数据矩阵Xss(t)(记为:空间平滑-ESPRIT)的方法以及CRB进行对比。在仿真实验中假设存在P=3个目标,其角度为:(φ1,θ1)=(-8°,10°),(φ2,θ2)=(0°,0°),(φ3,θ3)=(8°,-10°)。
这里定义角度估计值的均方根误差为

式中:L1为Monte-Carlo试验次数;和分别为第p个目标的第l1次Monte-Carlo试验DOD和DOA估计值,以下仿真实验的Monte-Carlo试验次数均为200。
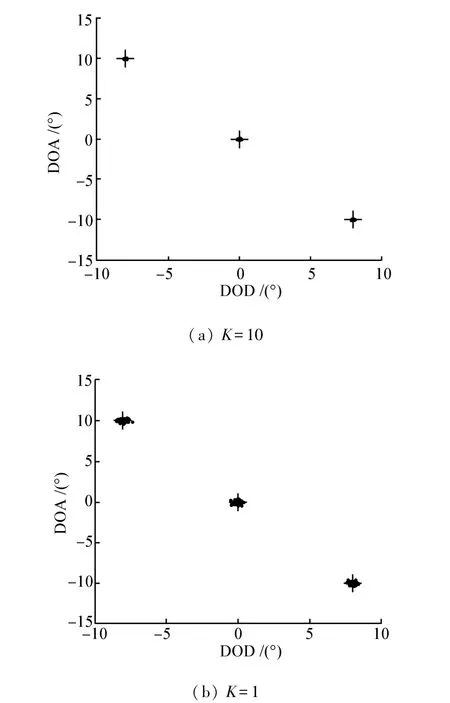
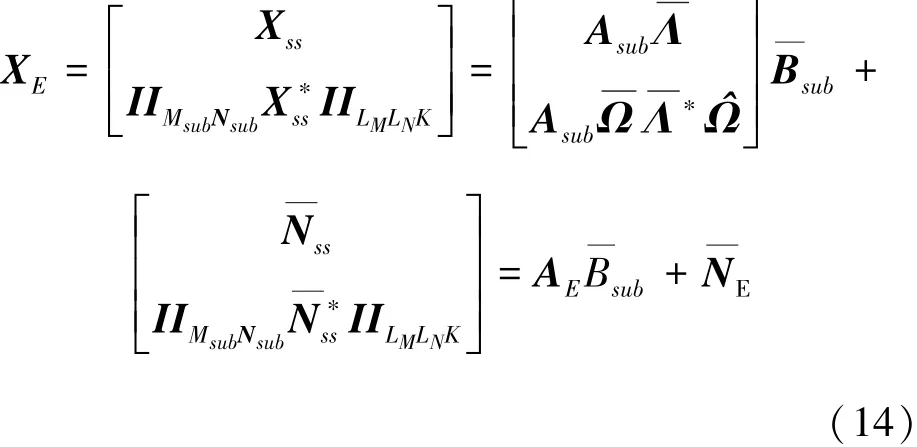
图2 本文算法收发角度估计结果Fig.2 The estimation results of the proposed method
图2给出了在M =9,N=12,Msub=4,Nsub=4,SNR=10 dB,快拍数分别为10和1的情况下,本文算法的收发角度估计结果。从图2中可知,本文算法在低快拍条件下,甚至是单快拍条件下,目标的收发角度都能够估计出来,且收发角度自动配对。
图3给出了在M =9,N=12,Msub=4,Nsub=4,快拍数分别为 10和 1的情况下,本文算法、ESPRIT、空间平滑ESPRIT的角度均方根误差以及双基地MIMO雷达角度估计的CRB。从图3(a)中可知,ESPRIT算法在低信噪比时已经失效,空间平滑-ESPRIT算法的角度估计性能比ESPRIT优越,而本文算法在不同的信噪比时的角度估计性能均优于ESPRIT和空间平滑ESPRIT,并接近于CRB。从图3(b)中可以看出,在单快拍时,ESPRIT算法已经完全失效,空间平滑-ESPRIT算法在低信噪比时角度估计性能急骤下降,而本文算法比空间平滑-ESPRIT提供更好的角度性能,同时在高信噪比时接近于CRB。这是由于本文算法利用了MIMO雷达虚拟阵列的旋转不变特性扩展了阵列孔径,提高了角度的空域分辨率,改善了收发角度的估计性能,因此具有优越的角度估计性能。
图3 角度估计均方根误差与SNR的关系Fig.3 The RMSE of angle estimation against
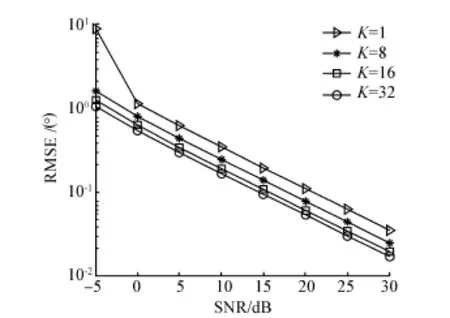
图4 角度估计均方根误差与快拍数的关系Fig.4 The RMSE of angle estimation against snapshots
图4则是M=9,N=12,Msub=4,Nsub=4,快拍数不同的情况下,本文算法的角度估计性能。从图4中可知,随着快拍数的增加,本文算法的角度估计性能有所改善。
图5则是M=9,N=12,Msub=4,Nsub=4,K=10,收发阵列的阵元数不同的情况下,本文算法的角度估计性能。从图5可以看出,无论是发射阵列的阵元数还是接收阵列的阵元数增加,本文算法的角度估计性能均有所提升。由前面的理论分析可知,收发阵列的阵元数增加等效于增加了信号的快拍数,因此本文算法的角度估计性能得到提升。
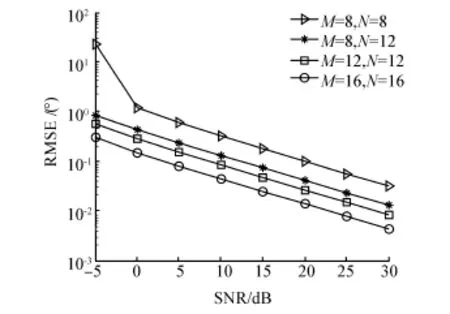
图5 角度估计均方根误差与收发阵元数的关系Fig.5 The RMSE of angle estimation against different transmit/receive elements
4 结束语
本文提出一种低快拍下MIMO雷达的收发角度联合估计算法。该算法对MIMO雷达的收发阵列进行二维联合空间平滑预处理,同时利用MIMO雷达虚拟阵列的旋转不变特性扩展阵列孔径,提高了角度的空域分辨率。仿真结果表明,所提算法在低快拍下比ESPRIT和空间平滑-ESPRIT具有更好的角度估计性能,甚至在单快拍时,所提算法也能够准确的估计出收发角度,并提供良好的角度估计性能,而ESPRIT算法已经失效。
[1]FISHLER E,HAIMOVICH A,BLUM R,et al.MIMO radar:an idea whose time has come[C]//IEEE Radar Conf Philadelphia,USA,2004:71-78.
[2]HAIMOVICH A M,BLUM R,CIMINI L.MIMO radar with widely separated antennas[J].IEEE Signal Process,2008,25(12):116-129.
[3]LI J,STOICA P.MIMO radar with colocated antennas[J].IEEE Signal Process,2007,24(5):106-114.
[4]王伟,赵俊杰,王辉.基于混合算法的MIMO雷达正交多相码设计[J].系统工程与电子技术,2013,35(2):294-298.
WANG Wei,ZHAO Junjie,WANG Hui.Design of orthogonal polyphase code for MIMO radar based on hybrid algorithm[J].Systems Engineering and Electronics,2013,35(2):284-298.
[5]郑志东,张剑云.MIMO雷达波束方向图及其旁瓣抑制方法[J].系统工程与电子技术,2010,32(2):287-290.
ZHENG Zhidong,ZHANG Jianyun.Beam pattern and sidelobe suppression based on MIMO radar[J].Systems Engineering and Electronics,2010,32(2):287-290.
[6]王伟,王咸鹏,盖猛.一种双基地MIMO雷达的相关目标定位方法 [J].兵工学报,2012,33(1):35-40.
WANG Wei,WANG Xianpeng,GAI Meng.A method for coherent multi-target localization in bistatic MIMO radar system[J].Acta Armamentarii,2013,24(5):106-114.
[7]王怀军,粟毅,朱宇涛,等.基于空间谱域填充的MIMO雷达成像研究[J].电子学报,2009,36(6):1242-1246.
WANG Huaijun,SU Yi,ZHU Yutao,et al.MIMO radar imaging based on spatial spectral-domain filling[J].Acta Electronica Sinica,2009,36(6):1242-1246.
[8]YAN H,LI J,LIAO G.Multitarget identification and localization using bistatic MIMO radar systems[J].EURASIP Journal on Advances in Signal Process,ID 2008,283483:1-8.
[9]GAO X,ZHANG X,FENG G,et al.On the MUSIC-derived aprroaches of angle estimation for bistatic MIMO radar[C]//In Proc Int'l Conf Wireless Networks and Inf Syst.Shanghai,China,2009:343-346.
[10]CHEN Duofang,CHEN Baixiao,QIN Guodong.Angle estimation using ESPRIT in MIMO radar[J].Electron.Lett.,2008,44(12):770-771.
[11]CHEN Jinli,GU Hong,SU Weimin.Angle estimation using ESPRIT without pairing in MIMO radar[J].Electron Lett,2008,44(24):1422-1423.
[12]王伟,王咸鹏,马跃华.基于多级维纳滤波的双基地MIMO雷达多目标定位方法 [J].航空学报,2012,33(7):1281-1288.
WANG Wei,WANG Xianpeng,MA Yuehua.Multi-target localization based on multi-stage Wiener filter for bistatic MIMO radar[J].Acta Aeronautica et Astronautica Sinica,2012,33(7):1281-1288.
[13]WANG W,WANG X P,MA Y,et al,Conjugate Unitary ESPRIT algorithm for bistatic MIMO radar[J].IEICE Trans Electron,2013,96(1):124-126.
[14]WANG W,WANG X P,SONG H,et al.Conjugate ESPRIT for DOA estimation in monostatic MIMO radar[J].Signal Process,2013,93:2070-2075.
[15]PILLAI S U,KWON B H.Forward/backward spatial smoothing techniques for coherent signal identification[J].IEEE Trans Acoust,Speech,Signal Processing,1989,25(1):8-15.
[16]ZOLTOWSKI M D,HAARDT M,MATHEWS C P.The stochastic CRB of array processing:A textbook derivation,[J].IEEE Signal Process Lett,2001,8(5):148-150.
Joint DOD and DOA estimation for MIMO radar with lower snapshots
WANG Xianpeng,WANG Wei,MA Yuehua,WANG Junxiang
(College of Automation,Harbin Engineering University,Harbin 150001,China)
The angle estimation performance of subspace algorithms based on the second order statistical characteristic is seriously descended with low snapshots in multiple-input multiple-output(MIMO)radar,even invalid with single snapshot.In order to solve this problem,a joint two-dimensional spatial smoothing multi-objective DOD and DOA estimation algorithm with enlarged array aperture is proposed.The proposed algorithm constructs a joint twodimensional spatial smoothing for both transmit array and receive array,and enlarges the aperture of array by exploiting the shift invariance property of the virtual array in MIMO radar.Then the DOD and DOA can be estimated by ESPRIT,which are paired automatically.Compared with the second order statistical characteristic based subspace algorithms,the proposed method provides better angle estimation performance with lower snapshots.Furthermore,the proposed method is suitable for single snapshot.Simulation results are presented to verify the effectiveness and advantages of the proposed method.
MIMO radar;bistatic;angle estimation;spatial smoothing;aperture extension
10.3969/j.issn.1006-7043.201306011
TN957.51
A
1006-7043(2014)09-1129-06
http://www.cnki.net/kcms/detail/23.1390.U.20140904.1819.002.html
2013-06-03. 网络出版时间:2014-09-04.
新世纪优秀人才支持计划基金资助项目(NCET-11-0287);中央高校基本业务费专项基金资助项目(HEUCFX41308);中国博士后科学基金资助项目(2014M550182);黑龙江省博士后特别资助项目(LBH-TZ0410);哈尔滨市科技创新人才资助项目(2013RFXXJ016).
王咸鹏(1986-),男,博士研究生;王伟(1979-),男,教授,博士生导师.
王伟,E-mail:wangwei407@hrbeu.edu.cn.
猜你喜欢
作文小学高年级(2022年3期)2022-04-20
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2018年12期)2018-12-29
福建中学数学(2018年1期)2018-11-29
西南石油大学学报(自然科学版)(2018年2期)2018-06-26
37°女人(2017年8期)2017-08-12
滇池(2017年7期)2017-07-18
雷达学报(2017年1期)2017-05-17
光学精密工程(2016年1期)2016-11-07
火控雷达技术(2016年3期)2016-02-06