GNSS系统时间偏差的确定及其对定位结果的影响
2014-06-21 08:39张雪张慧君李孝辉
时间频率学报 2014年1期
张雪,张慧君,李孝辉
GNSS系统时间偏差的确定及其对定位结果的影响
张雪1,2,张慧君1,李孝辉1
(1. 中国科学院国家授时中心,西安 710600;2. 中国科学院大学,北京 100049)
由于GNSS各个导航系统都有独立的系统时间,在GNSS多模导航定位中需要对各导航系统之间的系统时差进行处理。以GPS/GLONASS双模导航为例,讨论了系统时差的解决方法以及系统时差对定位结果的影响。实验结果表明,在多模导航定位中考虑系统时差可以有效地提高定位结果的准确性,改善定位结果的精度。
GNSS;系统时间偏差;定位结果
0 引言
随着全球卫星导航定位系统的发展,使用多个卫星导航系统兼容定位是未来导航领域的重要发展方向。对GNSS的每一个组成部分(GPS,GLONASS,COMPASS,Galileo系统等)在设计、构建和操作方面贯彻互用性,使它们的信号之间不互相堵塞并且在组合使用这些信号时能够提供最佳的导航服务,这就是多模导航的目的,这一目的的实现将会涉及一系列复杂的技术问题[1]。现在有越来越多的GNSS观测站配备GNSS接收机,多模接收机的应用能够跟踪更多的GNSS卫星,增加可见星的数目,从而改善观测的几何条件,提高定位的可靠性和精度。然而,不同的GNSS导航系统采用不同的系统时间,存在着系统时间偏差[2],简称系统时差。这导致了多模GNSS接收机对于不同导航系统卫星的观测值存在着相应的偏差。为了实现GNSS系统的兼容性与互操作性,各个GNSS导航系统都提出了其系统时间偏差监测的要求[3]。
1 GNSS系统时间偏差产生的原因
为了满足精密导航的需要,各卫星导航系统建立了专门的时间系统,并且溯源到国家的标准时间[4]。
全球定位系统GPS的系统时间称为GPST,溯源到UTC(USNO)。GPST属于原子时系统,是一个连续的时间尺度,不用闰秒来调整。
GLONASST是GLONASS系统的时间基准,它溯源到俄罗斯国家标准时间UTC(SU),并与UTC(SU)之间存在3 h的时差。它属于UTC时间系统,采用原子时秒长,但时标不连续,有闰秒调整。
GST是Galileo系统的时间基准,是由PTF(precise time facility)产生的,属于原子时系统。GST不实施闰秒调整。
BDS系统时间称为BDT,根据BDS地面控制中心原子钟组生成,并溯源到UTC(NTSC),BDT无闰秒调整。
下面以GPS系统和GLONASS系统为例(下文皆以GPS/GLONASS为例分析),分析系统时间偏差对组合定位产生的影响。
GPST溯源到UTC(USNO),GLONASST溯源到UTC(SU),它们之间存在系统时间偏差。利用双模接收机同时接收GPS,GLONASS卫星信号,使用导航电文中播发的钟参数修正,测量的GPS伪距改正到GPST系统,而测量的GLONASS伪距改正到GLONASST系统。这样,GPST与GLONASST之间的时差会引起测量误差,导致用户在解算位置信息时出现偏差[5],如图1所示。

图1 GPS/GLONASS系统时间偏差导致测量偏差
2 GNSS系统时间偏差的处理方法研究
GPS/GLONASS系统时差的处理方法,大致分为3种,分别为系统级,用户级和第三方处理方法。系统级方法就是将GPS,GLONASS系统时差测量出来,然后在各自的导航电文中进行播发。用户级方法就是将两个导航系统之间的时差作为第5个未知量,直接在用户端解算。用户可以通过一系列伪距方程来解算出用户的位置坐标和时间信息,如式(1)所示[2]:

双模导航情况下5个DOP参数用以下公式计算:

第三方处理方法是指通过第三方权威机构监测GPS/GLONASS系统时差,并向用户预报。
2.1 系统级处理方法



2.2 用户级处理方法



2.3 第三方处理方法
第三方处理方法是指通过第三方权威机构监测GPS/GLONASS系统时差,并向用户预报。用户可利用预报值参与定位解算,其具体处理方法与系统级处理方法相同。
3 系统时间偏差监测方法研究
当前系统时间与其他卫星导航系统时差监测方案主要有2种:1)建立时间系统之间的时间比对链路;2)接收其他卫星导航系统的空间信号。
中国科学院国家授时中心是我国标准时间的产生和保持单位,从2005年至今,国家授时中心产生并保持的协调世界时(UTC(NTSC))与国际标准协调世界时(UTC)的偏差始终保持在20 ns内,利用此优势采用GNSS定时接收机,测量(UTC(NTSC))与各导航系统之间的时差,并以此为中介得到各导航系统之间的时差。
国家授时中心采用第2种监测方案搭建GNSS时差监测平台,原理如图2所示。一方面,定时接收机接收GNSS空间信号,利用导航电文等解算出接收机与导航系统之间的时间差;另一方面,时间间隔计数器输出UTC(NTSC)1 PPS与接收机1 PPS定时信息的时间差,根据接收机输出的测量信息和IGS精密星历信息,对接收机输出的1PPS定时信息进行修正,可以分别得到UTC(NTSC)与GPS系统的时差以及UTC(NTSC)与GLONASS系统之间的时差[6],二者相减就可以得到GPS与GLONASS之间的系统时差。经过大量数据统计和误差分析,利用此监测系统得到的系统时差精度可达到5 ns[7]。
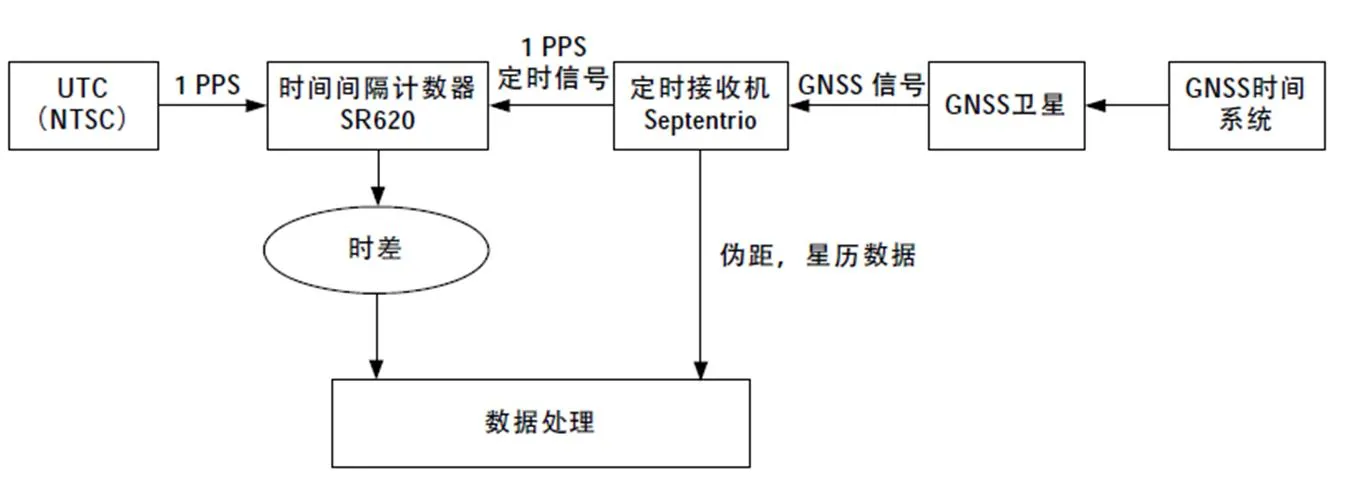
图2 GNSS系统时间偏差监测系统原理图
采用2012年7月的实测数据,用上述监测系统与用户级解算2种方法确定GPS/GLONASS的时差,并与BIPM公布的GPS/GLONASS时差数据作对比,以BIPM公布的时差数据作为标准值,分别计算时差监测结果和用户级解算时差结果相对于标准值差的均方根(RMS),对比结果如图3所示,可以看出:由这2种方法确定的系统时差结果与BIPM公布值走势基本相同,有较好的一致性,监测系统的时差监测结果(=2.97 ns)准确性略优于用户级解算时差结果(=3.15 ns)。
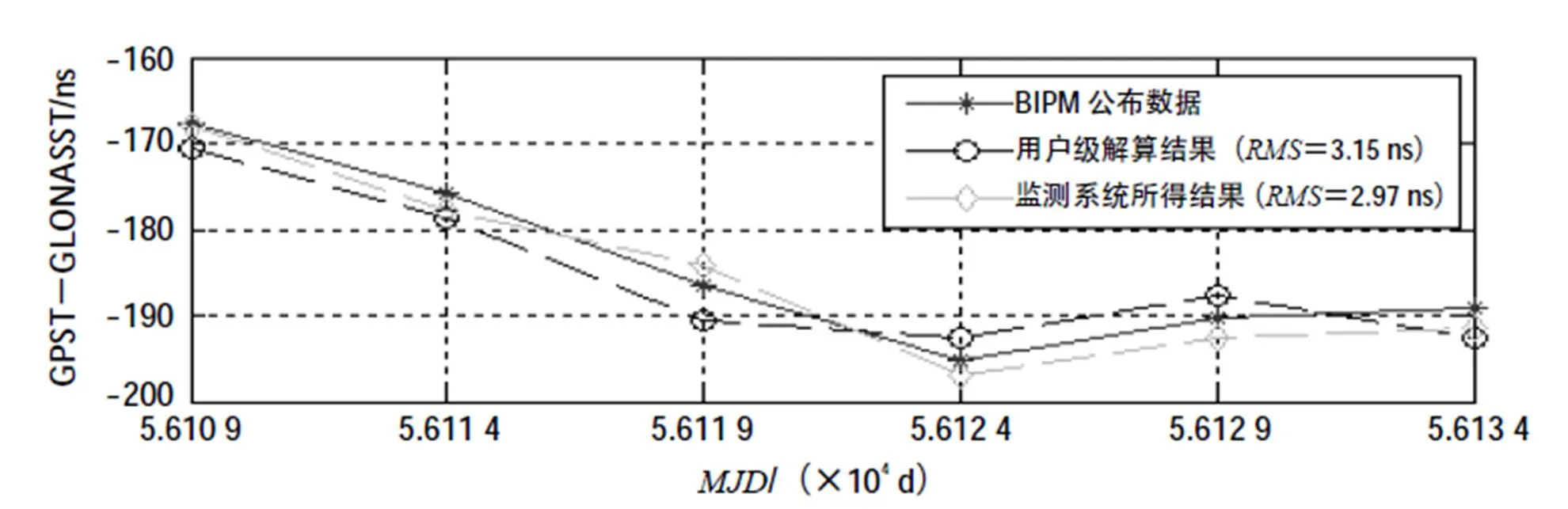
图3 GPS/GLONASS系统时差计算结果比对图(2012年7月)
4 GNSS系统时间偏差对定位结果的影响
尽管GLONASS与GPS在坐标系统,时间系统,信号结构等多方面存在诸多的差异,但是GPS的24颗卫星覆盖并不能保证在全球范围内实现用户的自主完备性监测(RAIM)[8]。所以将两者结合起来定位具有重要的现实意义。
选取临潼站点进行定位实验,接收机位置坐标已知,使用以下4种导航方式的实测数据进行定位解算对比研究,分析系统时间偏差给导航定位结果带来的影响。1)GPS系统单独定位;2)GLONASS单独定位;3)GPS/GLONASS组合定位,引入系统时间偏差(用户级解算);4)GPS/GLONASS组合定位,引入系统时间偏差(由上述监测系统监测,其监测精度为5 ns)。虽然GPS采用WGS84坐标,而GLONASS采用PZ90坐标,存在坐标差异,但双模接收机内部会将所有坐标都转换统一到WGS84坐标(下文所涉及的三维位置均指在WGS84坐标中的位置)。
4.1 卫星可见度
选取不同的仰角截止角,在临潼站观察在不同导航模式(GPS导航、GLONASS导航、GPS/GLONASS双模导航)下的可见卫星数目变化情况,表1为实验结果。
表1 不同导航模式下临潼站的不同可见卫星数目在1d内所占的时间百分比

由表1可以看出:相同定位模式下仰角截止角越大,可见的卫星数目就越少;仰角截止角相同时,利用GPS/GLONASS双模导航系统的卫星可见数目多于任意一个单独的导航系统。尤其在多遮挡的环境(城市以及多山地区)下,多模接收机的应用能够跟踪更多的GNSS卫星,更有利于多模导航的用户定位计算,提高定位的可靠性和精确度。
4.2 准确性
将监测系统监测的系统时差引入GPS/GLONASS组合定位中,即上文提到的定位解算的方式4),卫星仰角截止角选取为10°,求出的三维位置与接收机已知坐标的偏差大约在±2m之间,如图4所示。采用如下面的式(8)表达的误差的均方根()来比较分析其定位的准确性:

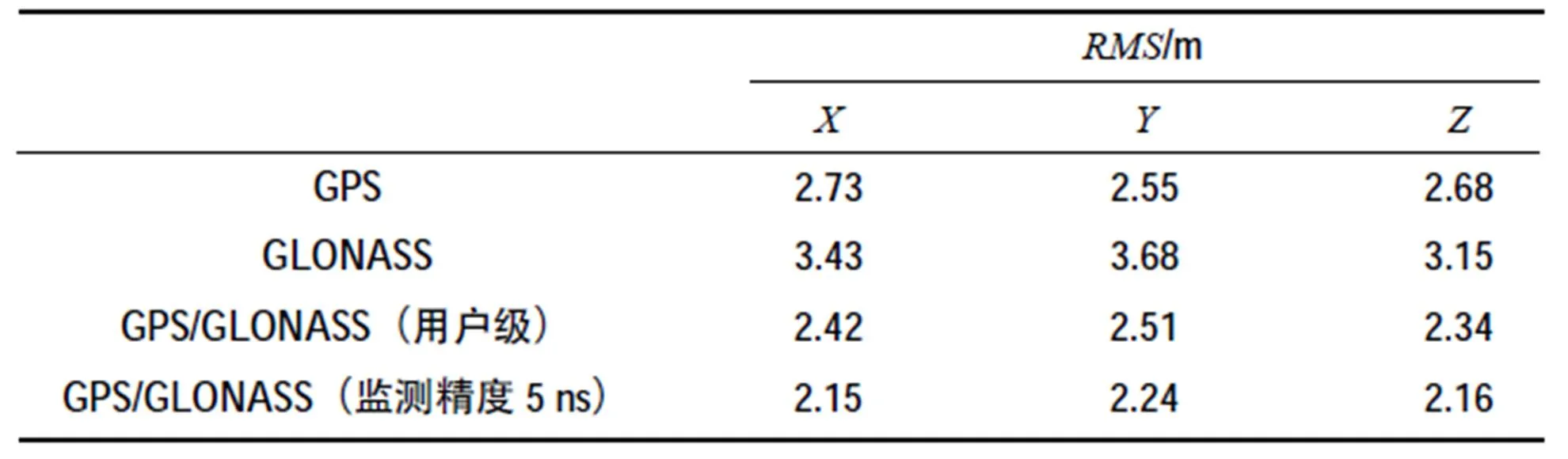
通过对不同导航模式定位解算进行实验,发现双系统组合定位结果的准确性明显优于单系统定位结果的准确性。3个方向的坐标的计算结果表明,双系统定位结果的明显小于单系统定位结果的,其具体数值如表2所示。

图4 GPS/GLONASS组合定位结果的位置偏差(仰角≥10°)
表2 不同导航模式下的定位值(仰角≥10°)
4.3 系统DOP值
不同的GNSS系统时差确定方法可能会对定位精度带来不同的影响。计算不同处理方法下的系统DOP值,用以评价其对定位精度的影响,计算结果如表3所示。
表3 不同导航模式下系统的DOP值

由表3可以看出:1)同一种导航模式下,随着仰角截止角的增大,,显著增大;2)在相同的仰角截止角下,GPS/GLONASS组合定位大大改善了可见卫星的几何分布,使得值较GPS或者GLONASS单模导航的值都有所降低,相对GPS而言,降低约20%,提高了定位的精度。
5 结语
如今,导航系统日益增多,多卫星导航系统联合定位是未来导航领域的重要发展方向,系统时间偏差问题成为多卫星导航系统组合定位中非常重要的问题之一。本文介绍了系统时间偏差的解决方法,进行了单系统、双系统(引入系统时间偏差)定位实验,实验结果的分析表明双系统定位解算(引入系统时间偏差)可以增加可见星的数目,有效地提高定位的准确性和精度,其定位结果优于GPS系统定位结果。
[1] 吴海涛, 李孝辉, 华宇, 等. 卫星导航系统时间基础[M]. 北京: 科学出版社, 2011: 159.
[2] VANSCHOENBEEK I, BONHOURE B, BOSCHETTI M, et al. GNSS time offset: effects on GPS-Galileo interoperability performance[J]. Inside GNSS, 2007, 2(5): 60-70.
[3] 陈俊平, 吴斌, 胡小工, 等. GPS/GLONASS时差监测及其在多模定位中的应用[C]//第三届中国卫星导航学术年会论文集. 广州: 2012中国卫星导航学会年会组委会, 2012.
[4] 张慧君, 李孝辉, 许龙霞. GNSS系统时间偏差监测与预报[C] // 第一届中国卫星导航学术年会论文集. 北京: 2012中国卫星导航学会年会组委会, 2010.
[5] MOUDRAK A, KONOVALTSEV A, FURTHNER J. GPS Galileo time offset: How it affects positioning accuracy and how to cope with it[C] // ION GNSS 17th International Technical Meeting of the Satellite Division. Long Beach: Long Beach Convention Center, 2004: 660-669.
[6] 李孝辉, 刘阳, 张慧君, 等. 基于UTC(NTSC)的GPS接收机时延测量[J]. 时间频率学报, 2009, 32(1): 18-21.
[7] 朱琳. GNSS系统时差单站和多站联合监测方法研究[D]. 北京: 中国科学院大学, 2013.
[8] 许龙霞, 张慧君, 李孝辉. 多模卫星导航系统的RAIM算法研究[J]. 时间频率学报, 2011, 34(2): 131-138.
GNSS system time offset determination and its effect on positioning result
ZHANG Xue1,2, ZHANG Hui-jun1, LI Xiao-hui1
(1. National Time Service Center, Chinese Academy of Sciences, Xi′an 710600, China;2. University of Chinese Academy of Sciences, Beijing 100049, China)
In the Multi-GNSS satellite navigation application, the time offset between different navigation systems needs to be dealt with, since each navigation system has its own system timescale. Taking the combined GPS/GLONASS positioning as an example, the system time offset determination and its effect on positioning result were discussed. The experiment result shows that the positioning accuracy can be improved effectively in multi-GNSS navigation by taking the system time offset into consideration.
GNSS; system time offset; positioning result
TN967.1
A
1674-0637(2014)01-0057-08
2013-03-29
中国科学院“西部之光”人才培养计划资助项目(Y109YR2701)
张雪,女,硕士研究生,主要从事GNSS系统时差监测方法研究。
猜你喜欢
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
学生天地(2020年6期)2020-08-25
数学年刊A辑(中文版)(2020年2期)2020-07-25
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
中学生数理化·八年级物理人教版(2018年4期)2018-06-27
中国惯性技术学报(2017年1期)2017-06-09
百科探秘·航空航天(2016年9期)2016-12-01
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24