基于模糊神经网络的无刷直流电动机能量回馈控制
2014-06-19 09:09:26费蓝冰魏玉平
微特电机 2014年1期
费蓝冰,崔 方,魏玉平
(1.江苏大学,江苏镇江212013;2.江苏科技大学,江苏镇江212003)
0 引 言
目前国内外针对无刷直流电动机能量回馈做了大量的研究,已经取得了一些成果[2-4]。但由于无刷直流电动机系统具有非线性、时变的特性,因而很难建立无刷直流电动机能量回馈系统的准确数学模型。文献[2]等采用神经滑模结构对无刷直流电动机的能量回馈过程进行控制,取得了不错的效果,但文中算法只考虑了制动电流对能量回馈的影响,并没有考虑转速对能量回馈效率的影响,使得对能量回馈效率的控制精度不高,且缺少实物验证。文献[3]采用模糊控制算法对能量回馈过程进行控制,而其规则来源于专家的经验和知识,缺乏自学习和自适应能力。文献[4]提出模糊PI控制技术,提高了无刷直流电动机能量回馈控制的鲁棒性,但是该控制技术仍是建立在数学模型上的,使得该方法无法达到设计的预期效果。
针对当前研究成果存在的不足,在分析能量回馈原理的基础上,提出采用基于Takagi-Sugeno模型的模糊神经网络来控制无刷直流电动机的能量回馈过程,制动电流与反馈电流的偏差、电机转速作为模型的输入,占空比作为模型的输出,系统中还使用BP学习算法对网络进行训练学习,使得模型具有自学习、自适应的能力。最后将设计的控制系统仿真结果与试验结果作对比,结果表明,该模型能量回馈效率高,鲁棒性强。
1 能量回馈原理
能量回馈就是电机工作于再生制动模式。在制动时,控制驱动器使电流方向与正方向运行时相反,便会产生制动性质的转矩。当产生的电压高于蓄电池时,可以将电流回馈到蓄电池,达到能量回馈的目的[1]。在回馈控制阶段,将上桥臂的功率管关断,无刷直流电动机控制器根据位置传感器信号对下桥臂的功率管的通断进行有规律的PWM控制,可以起到升压斩波的效果。在一个PWM周期内,无刷直流电动机的能量回馈控制过程分为续流和能量回馈两个阶段。图1是能量回馈控制过程的电流流向图,其中左图为续流阶段电流流向图,右图为能量回馈阶段电流流向图。

图1 无刷直流电动机电流流向图
当VT6导通时,为电流提供续流通道。由于无刷直流电动机是感性负载,在此阶段,电能将存储于三相绕组的电感上。此时在电机反电动势下,电流形成了两条续流通道,一条通过VD4构成了由C相到B相的续流通道,另一条通过VD2由C相流向A相的续流通道。
当VT6关断时,在反电动势与三相绕组的寄生电感共同作用下,存储于三相绕组中的能量回馈到蓄电池中。此阶段的电流流向如图2所示。VT6关断,电流经VD5回馈到蓄电池。同样存在通过VD2和VD4流向A相和B相的电流通路。
2 模糊神经网络控制器设计
2.1 无刷直流电动机能量回馈控制模型
结合无刷直流电动机回馈制动的专家经验,本文以给定电流与反馈电流的偏差ΔI,当前转速为输入量S,PWM脉宽值调节量U为输出变量,通过改变PWM占空比控制回馈电流,从而调节制动转矩,最终达到控制能量回馈的目的[3]。
图2是无刷直流电动机能量回馈系统的模糊神经网络框图。模糊神经网络控制器有训练样本,误差反向传播训练算法网络的离线学习算法和一个模糊神经网络组成。模糊神经网络使用离线学习算法进行训练。离线学习的训练样本是有无刷直流电动机在能量回馈状态时的相关动态信号组成的。该样本表由ΔI(l)、S(l)和U(l)组成,其中l为样本中样本的数量。

图2 无刷直流电动机能量回馈系统的模糊神经网络框图
2.2 无刷直流电动机能量回馈的模糊神经网络模型
本文建立了一个Sugeno模型的模糊神经网络控制器。根据上文中的设计要求,建立的BLDCM能量回馈的模糊神经网络结构图,如图3所示。该模型由5层网络结构组成。该网络结构的作用及函数如下:
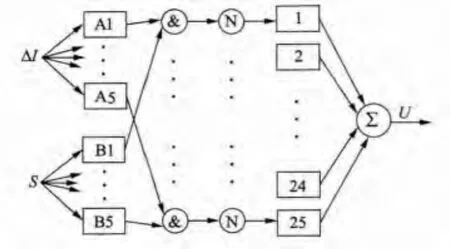
图3 模糊神经网络结构图
第一层:模糊化层。该层由隶属度函数在其论域上对输入值进行模糊化运算,求出模糊输入向量。本系统的隶属度函数采用高斯函数。

第二层:规则层。实现输入变量(ΔI,S)与输出变量(U)之间的映射:ωi代表每个节点中规则所对应的适用度。
第三层:归一化层。该层对规则层的规则适用度进行归一化计算,加快模糊神经网络网络结构的调整。

第四层:反模糊化层。对模糊输出向量进行反模糊化运算。
式中:fi=pi0x0+pi1x1+pi2x2=pi0+pi1ΔI+pi2S。pik是第三层与第四层之间的连接权值。
第五层:输出层。该层对上一层的反模糊化的结果进行加权综合,输出精确的结果。

2.3 模糊神经网络的学习
该模型主要学习的参数是隶属度函数层中的隶属度函数的中心值 CAi、CBi和宽度 σAi、σBi,反模糊化层的连接权pik。通过对这些参数的学习和调整来实现对模糊模式的记忆。
误差函数的定义:

式中:l=1,2,…,1 550,l为学习样本中第 l个样本数组;d(l)表示期望输出的PWM脉宽值调节量;y(l)际输出脉宽值调节量。该模糊神经网络各层误差的定义如下:

式(8)~ 式(11)中,i=1,2,…,25;k=0,1,2,其中δ(5)表示由第五层的输入传递来的误差,、和分别表示各层每个节点所对应的输入误差。

式(12)和式(13)表示的是第一层各节点的输入误差。其中,i=1,2,3,4,5。因此,可得该层中每个节点隶属度函数所对应的中心值(C)和宽度(σ)的变化量,如下:


由式(14)~式(17)可以得出参数调整的算法:

式中:βC、βσ为相对于C和σ的学习率。
3 仿真及实验结果
根据上文中建立的模糊神经网络模型,对无刷直流电动机能量回馈系统进行仿真。无刷直流电动机的技术参数:额定功率1 000 W,额定电压48 V,额定转速2 000 r/min,最大效率点电流43 A,相电阻0.2 Ω,相电感8.5 mH。
本文采用1 550个训练样本,迭代500代,对网络进行离线学习。训练过程中的均方根误差变化曲线如图4所示。采用BP神经网络训练后的模糊神经网络显示了优秀的非线性效果。从图4可以看出,当训练到40代左右时,网络输出误差下降到0.139。该算法收敛快速,误差小,能够满足系统的控制精度要求。

图4 训练过程中的均方根误差变化曲线
图5 为当电机制动初速度为2 000r/min时,不同控制方式的能量回馈效率曲线变化图。由图5可以看出,仿真情况下模糊神经网络系统的能量回馈效率要比模糊控制能量回馈效率高0.19左右,模糊神经网络系统能量回馈效率的仿真结果与试验结果基本一致。这说明模糊神经网络系统能够提高能量回收效率。

图5 能量回馈效率变化曲线
表1是不同控制方式下能量回馈效率与电机制动初始转速之间的关系。由表1可知:
(1)不同转速下,模糊神经网络系统比模糊系统的能量回馈效率高;
(2)当转速变化时,模糊神经网络系统比模糊系统的能量回馈效率变化小;
(3)在回馈制动过程中,当制动转速低于临界制动转速时,将不能进行能量回馈;模糊神经网络系统能量回馈的最低制动初始转速比模糊控制的小;
(4)模糊神经网络仿真结果与试验结果相符合,该模型满足设计要求。

表1 几种不同结果的比较
4 结 语
基于模糊神经网络控制的能量回馈系统其临界制动转速低,即系统能在较低转速时产生制动,并可以进行能量回馈。因此系统能量回馈的范围增大,回馈效率提高。
所设计的模糊神经网络控制器,成功地解决了传统的无刷直流电动机能量回馈系统控制精度不高,稳定性和实时性差的问题。并且响应快速、鲁棒性强,并具有神经网络自学习、自适应的能力。实物试验证明所设计的能量回馈控制技术成功且安全可靠。
[1]俞志文,姜淑忠,温新明,等.电动汽车用无刷直流电机回馈制动研究[C]//微特电机技术创新与发展论文集.西安,2009:91-93.
[2]Cao Jianbo,E Shiju,Zhu Xilin,et al.Simulation research on neural network sliding mode control of energy-regenerative braking of electric vehicle[J].Applied Mechanicls,2010,38(37):1187 -1190.
[3]宗立志.电动车用无刷直流电机能量回馈控制技术[D].北京工业大学硕士学位论文,2008.
[4]刘龙江,张政.基于DSP的电动汽车再生制动模糊PI控制系统[J].汽车零部件,2012(9):062-065.
[5]李世超,石秀华,孙希通,等.改进模糊神经网络无刷直流电机控制系统设计[J].计算机仿真.2009,26(10):153 -165.
[6]Elmas C,Ustun O,Sayan H H.A neuro- fuzzy controller for speed control of permanent magnet synchronous motor drive[J].Expert Systems with Applications,2008,34:657 -664.
[7]Sharifian M B B,Shafiei M,Sadeghi M S,et al.Direct torque control of brushless DC motor drives based on ANFIS controller with fuzzy supervisory learning[C]//2011 International Conference on Electrical Machines and Systems(ICEMS).IEEE,2011:1 -6.
[8]Gaur P,Mittal A P,Singh B.Recurrent and feedforward neural network control of permanent magnet synchronous motor[J].IETE Journal of Research,2011,57(6):541 -549.
[9]孙佃升,高联学,白连平.电流滞环跟踪控制的永磁无刷直流电机回馈制动的研究[J].计算机技术与应用,2011,37(6):138-144.
[10]Cui Wei,Zhang Hang,Ma Yan - li,et al.Regenerative braking control method and optimal scheme for electric motorcycle[C]//Proceeding of the 2011 International Conference on Power Engineering,Energy and Electrical Drives.Span,2011:419 -424.
[11]成立,奚家健,李宁,等.一种半/全桥PWM切换策略电动车能量回馈法[J].江苏大学学报(自然科学版),2013,34(3):304-308.
[12]Wang Guoye,Xiao Hang,Zhang Juanli,et al.Energy regenerative braking ABS control research on feedback lockup driving-braking integrated system for electric vehicles[J].Mechanika,2012,18(3):341-346.
[13]孙佃升,贾荣丛,白连平.半桥调制下无刷直流电机回馈制动的研究[J].电力电子技术,2008,42(10):22 -24.
[14]吴海波.无刷直流电机负载能耗制动的分析与实现[J].仪器仪表用户,2012,19(1):80 -83.
[15]Kim S-S,Kwak K -C.Development of quantum -based adptive neuro - fuzzy network[J].IEEE Transactions on Systems,Man,and Cybernetics,Part B:Cybernetics,2009,40(1):91-100.
猜你喜欢
疯狂英语·新悦读(2022年7期)2022-11-23 00:33:39
厦门大学学报(自然科学版)(2022年4期)2022-07-15 08:58:40
北京第二外国语学院学报(2021年2期)2021-08-13 08:34:34
现代装饰(2020年7期)2020-07-27 01:27:50
运筹与管理(2019年10期)2019-12-17 06:07:12
电子制作(2019年19期)2019-11-23 08:42:00
重型机械(2016年1期)2016-03-01 03:42:04
大连工业大学学报(2015年4期)2015-12-11 04:06:52
共产党员(辽宁)(2015年6期)2015-06-07 02:08:50
海军航空大学学报(2015年4期)2015-02-27 13:45:47