基于ANSYS 的磁悬浮平台空载磁场有限元分析
2014-11-22 07:52:08仇志坚戚振亚陈小玲
微特电机 2014年1期
仇志坚,戚振亚,陈小玲
(上海大学,上海200072)
0 引 言
磁悬浮平台技术是一种综合了电磁学、控制理论及电力电子技术等众多领域的交叉学科技术,具有无接触、无摩擦、无噪声、长寿命、结构新颖等优势。因而在航空航天、微电子制造、精密定位、微细加工等众多领域得到了广泛发展和应用。磁悬浮平台的发展阶段主要分为三个方面:第一代磁悬浮技术,也称为吸力型磁悬浮技术,是靠磁性材料之间的吸引力克服物体的重力使其悬浮;第二代磁悬浮技术,也称为斥力型磁悬浮技术,是靠磁性材料之间的斥力克服物体的重力使其悬浮;第三代磁悬浮技术,也称为混合型磁悬浮技术,磁性材料之间既有吸引力也有斥力,二者相互作用克服重力使其悬浮。
从目前的研究状况来看,文献[1]针对一种应用在微电子制造业中的新型磁悬浮平台,运用ANSYS 分析软件建立三维模型,分析了磁悬浮平台载体受力与电流之间的关系、载体受力与间隙之间的关系,但是没有分析载体受力与平台结构尺寸参数的关系。文献[2]针对进给系统的工作台提出一种斥力型磁悬浮平台,采用磁体等效方法推导出其数学模型,并通过实验验证了其准确性,实现了斥力型磁悬浮平台的稳定悬浮,文中只分析了斥力与气隙的关系,未涉及平台结构参数的分析。文献[3]针对微重力环境平台激励器,设计出多种结构形式,完成了有限元磁路仿真和激励器的线圈设计,并比较、总结了不同结构形式的优缺点,为激励器的具体设计提供了依据,但是没有涉及平台结构参数的设计分析。文献[4]针对高加速、超高精度的平台,建立了五自由度磁悬浮运动平台系统完整的机电耦合动力学模型,并得到了平台稳定悬浮时的控制参数范围。文献[5-6]是针对某两级磁悬浮平台进行PID控制;文献[7-9]介绍一种应用于半导体光盘、纳米技术等领域的新型磁悬浮平台,分别采用了自抗扰控制器的控制方法、H∞鲁棒控制方法、多变量非线性的逆系统理论;文献[10]是针对纳米两维磁悬浮定位平台,采用了Halbach 阵列。
从以上文献可以看出,对于磁悬浮平台多集中于控制方面的研究,而且其悬浮控制的数学模型没有经过有限元方法的验证,因此,会影响悬浮控制的精度,然而关于平台本体的电磁场有限元分析和验证较少,尤其是对平台结构尺寸参数优化尚没有形成完善的理论体系。而本文主要是针对磁悬浮平台在空载磁场时,采用ANSYS 软件的APDL 语言建模并仿真,分析了悬浮力与磁悬浮平台结构多参数之间的变化情况,对磁悬浮平台的结构尺寸优化和精确控制研究起到关键作用。
1 磁悬浮平台的工作原理
本文所研究的磁悬浮平台的结构示意图如图1所示,主体部分有永磁环、悬浮物、四个线圈、位移传感器等组成。悬浮物是被悬浮的对象;永磁环的作用是提供基本磁场;线圈的作用是实时调节电流以实现悬浮物的稳定悬浮;位移传感器的作用是检测悬浮物和永磁环之间的位移变化。

图1 磁悬浮平台的结构示意图
磁悬浮平台的控制框图如图2 所示,根据恩绍定理(Earnshaw's theorem)可知,悬浮物在静态空载磁场中无法获得稳定悬浮。所以,为获得稳定的悬浮状态,需要加入线圈和位移传感器。其基本工作原理是:当平台受到扰动时,由位移传感器检测到悬浮物与永磁环之间的位置变化,传感器输出电压发生变化,信号经过控制器处理,并由功率放大器放大,以调节线圈中的电流,使平台重新稳定悬浮。

图2 磁悬浮平台的控制框图
2 ANSYS 建模仿真
2.1 APDL 命令流建模
APDL 是一种可用来自动完成常规有限元分析操作或通过参数化变量方式建立分析模型的脚本语言,是完成优化设计和自适应网格划分最主要的基础。APDL 文件命令流的生成方法有两种,一种是对ANSYS 软件的命令及相关参数非常熟悉的情况下直接编写;另一种是利用在GUI 模式下生成的LOG 文件修改而成。本文采用的是第二种方法,具体的流程图如3 所示。
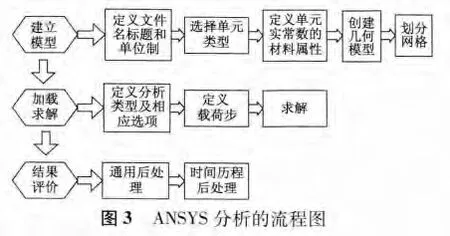
图3 ANSYS 分析的流程图
命令流建模的过程主要包括:①建立模型中,选取MKS 国际单位制,轴对称坐标系,场域剖分采用PLANE53 单元,并定义悬浮物、永磁环、气隙的材料属性,建立模型,选择材料属性并进行网格划分;②加载求解中,施加边界条件、定义力单元组件,采用麦克斯韦张量法计算悬浮力,采用矢量磁位Az来求解;③查看分析结果[11-12]。
2.2 磁悬浮平台空载磁场的有限元分析
本文研究的磁悬浮平台中,悬浮物采用钕铁硼材料,永磁环采用铁氧体材料,详细的参数如表1 所示,从中算得悬浮物的重力G 约为0.27 N。

表1 磁悬浮平台的参数表
有限元软件通常用于悬浮特性的验证,而考虑麦克斯韦方程组进行解析法分析建模比较困难,所以本文建立了磁悬浮平台的空载磁场的二维模型,进行电磁场分析,从中可以得到磁通密度曲线和y方向的受力情况。其中悬浮物的磁通密度曲线方向向下或指向永磁环方向,大小以紫色蓝色浅蓝色等表示的为主,磁通密度范围是0.234~0.700 T ;永磁环的磁通密度曲线方向向上或指向悬浮物,磁通密度范围是0.000 02~0.234 T ,比较小。悬浮物的受力大小范围是0.156~2.5 N 。
3 多参数变化的仿真分析
从表1 中可知,磁悬浮平台的结构尺寸参数较多,其中厚度、半径影响较大,因此本文主要分析了悬浮物的半径和厚度同时变化、内外半径同时变化时的悬浮力的变化;永磁环的外半径和厚度同时变化、内外半径同时变化时悬浮力的变化情况,主要包括以下几个方面。
3.1 悬浮物的半径和厚度同时变化
在仿真过程中,悬浮物的厚度变化是从0.5~30 mm,悬浮物的半径变化是1~50 mm,其他参数保持不变,得到悬浮力的变化情况如图4 所示。从图4 中可以看出,随着悬浮物厚度和半径增大,悬浮力也呈增大趋势,其中悬浮物的体积也会相应的变化,为了能承载更重的悬浮物,所以要对悬浮物的体积进行优化,即要选取合适的厚度和半径。因为悬浮物初始的G = 0.27 N,所以悬浮力F1≥G,才可能实现悬浮。

图4 悬浮物的半径和厚度同时变化时悬浮力的变化曲线图
根据悬浮物体积最小的原则,用MATLAB 整理图4 中的数据可得表2,其中从1 N 开始,每次均在1 N 的范围内进行优化。从表2 中可以看出,F1/G 的比值越大,越能承载更重的悬浮物,其中在悬浮物的半径为45 mm、厚度为8.5 mm 时,F1/G 的值最大。

表2 悬浮物的悬浮力与悬浮物厚度和半径的关系
3.2 悬浮物外半径和内半径同时变化
在仿真过程中,悬浮物的外半径变化1~30 mm,内半径变化是0~25 mm,其他参数保持不变,得到的悬浮力的变化情况如图5 所示。从图5 中可以看出,悬浮物的内半径变化对悬浮力基本没影响,而悬浮力随着外半径的增大而呈现增大的趋势。

图5 悬浮物的内外半径同时变化时悬浮力的变化曲线图
同理,整理图5 的数据可得到表3,其中R11表示悬浮物的外半径,R12表示悬浮物的内半径,从0.5 N 开始,每次均在0.5 N 的范围内进行优化。从表3中可以看出,悬浮物的外半径为24 mm、内半径为23 mm 时,F1/G 的值最大,此时能承载更重的悬浮物。

表3 悬浮物的悬浮力与悬浮物内外半径的关系
3.3 永磁环外半径和厚度同时变化
在仿真过程中,永磁环的厚度变化10~40 mm时,外半径变化50~90 mm,其他参数保持不变,得到的悬浮力的变化情况如图6 所示。从图6 中可以看出,下永磁环的外半径和厚度在变化时,悬浮物的受力变化范围比较小,而且还会产生相反方向的力,可见下永磁环的外半径和厚度对悬浮物的悬浮力的影响较小。

图6 永磁环的外半径和厚度同时变化时悬浮物的悬浮力的变化曲线图
根据永磁环体积最小的原则,整理图6 中的数据可得表4,从0.5 N 开始,每次均在0.5 N 的范围内进行优化。从表4 中可以看出永磁环外半径为56 mm、厚度为13 mm 时,F1/G 的值最大,能承载更重的悬浮物。

表4 悬浮物的悬浮力与永磁环厚度和外半径的关系
3.4 永磁环外半径和内半径同时变化
在仿真过程中,永磁环外半径的变化是60~80 mm,20~45 mm,其他参数保持不变,得到的悬浮力的变化情况如图7 所示。从图7 中可以看出,永磁环的内外半径在变化时,悬浮物的受力也较小,也有部分出现了反方向的力,在外半径固定时,悬浮物的悬浮力基本随内半径的较小而增大。

图7 永磁环的内外半径同时变化时悬浮物的悬浮力的变化曲线图
同理,整理图7中的数据可得表5,从0.5 N开始,每次均在0.5 N 的范围内进行优化。从表5 中可以看出,永磁环外半径为62 mm、内半径为44 mm时,F1/G 的值最大,能承载更重的悬浮物。

表5 悬浮物的悬浮力与永磁环内外半径的关系
4 结 语
本文利用ANSYS 软件的APDL 命令流建模以及仿真,在磁悬浮平台结构尺寸多参数变化时,对相应情况下的悬浮物的悬浮力的变化情况进行分析比较,可以看到悬浮力与悬浮物半径和厚度、悬浮物内外半径、永磁环厚度和外半径、永磁环内外半径等四种情况下的关系,可以根据实际设计的需要选择合适的参数。本文所作的研究对磁悬浮平台的结构参数优化设计和悬浮控制研究起到了重要作用。
[1] 郭磊,严珩志,李群明,等.一种磁悬浮平台的电磁场分析[J].仪器仪表用户,2005,12(2):76-77.
[2] 张文跃,杨均悦,葛研军,等.斥力型磁悬浮运动平台建模与仿真[J].武汉理工大学学报,2010,32(1):54-57.
[3] 陈进新,王宇.空间微重力磁悬浮运动平台激励器研究[J].空间科学学报,2008,28(6):584-591.
[4] 李群明,万梁,段吉安,等.磁悬浮平台系统的机电耦合动力学模型及稳定性分析[J].光学精密工程,2007,15 (4):535 -542.
[5] 段吉安,齐斌,廖平.新型磁悬浮运动平台力学分析与控制[J].控制工程,2009,16(2):152-153.
[6] 戴利明,齐斌,周海波,等.磁悬浮运动平台的PID 控制[J].仪器仪表,2008(6):79-82.
[7] 刘德君,曲永印,白晶.基于自抗扰控制器的6-DOF 磁悬浮平台悬浮高度控制[J].微细加工技术,2008(3):50-54.
[8] 郭庆鼎,刘德君,赵希梅.基于输入解耦的6-DOF 磁悬浮平台悬浮高度的H∞控制[J].电工技术学报,2005,20(11):70-74.
[9] 刘德君,郭庆鼎,翁秀华.直线电机驱动的磁悬浮运动平台推力动态解耦控制[J].沈阳工业大学学报,2005,27(1):43 -46.
[10] 仉毅,周虹.采用HALBACH 磁阵列的磁悬浮平台的磁场分析[J].机床与液压,2010,38(1):41-43.
[11] 龚曙光,谢桂兰.ANSYS 操作命令与参数化编程[M].北京:机械工业出版社,2004.
[12] 张倩,胡仁喜,康士廷,等.ANSYS 12.0 电磁学有限元分析从入门到精通[M].北京:机械工业出版社,2010.
猜你喜欢
化工管理(2022年14期)2022-12-02 11:43:52
小猕猴智力画刊(2022年4期)2022-05-23 13:48:30
小学科学(学生版)(2021年4期)2021-07-23 01:24:18
上海大中型电机(2021年2期)2021-07-21 03:01:32
防爆电机(2020年6期)2020-12-14 07:16:54
中学生数理化·八年级物理人教版(2017年6期)2017-11-09 06:00:31
中学生数理化·七年级数学人教版(2017年6期)2017-11-09 02:46:03
中国卫生标准管理(2015年3期)2016-01-14 03:41:43
油气田环境保护(2015年4期)2015-12-28 10:45:46
广东海洋大学学报(2015年3期)2015-12-22 10:05:30