
多相永磁同步电机PWM技术
2014-06-15 17:14薛劭申许海平黄钦鹏
哈尔滨工业大学学报 2014年4期
薛劭申,许海平,方 程,黄钦鹏,2,薛 山
多相永磁同步电机PWM技术
薛劭申1,许海平1,方 程1,黄钦鹏1,2,薛 山1
(1.中国科学院电工研究所,100190北京;2.中国科学院大学电子电气与通信工程学院,100049北京)
为了解决在多相电机控制系统中普遍存在的谐波问题,找到合适的PWM技术以减少多相电机控制系统中的谐波畸变,分析了几种适用于多相电机控制的PWM技术的原理,研究了最大矢量SVPWM,空间多维矢量SVPWM和基于载波的多相PWM技术,给出了这些PWM技术的推导过程与实现方法,并利用十五相永磁同步电机的矢量控制系统的Matlab/Simulink仿真模型,对不同的PWM技术进行仿真.仿真结果表明,采用基于载波的多相PWM技术的电机控制系统电流谐波含量小,控制性能好.
多相电机;十五相永磁同步电机;多相PWM技术;矢量控制;基于载波的PWM
与传统的三相电机系统相比,多相电机具有许多非常突出的优点[1-3]:易实现低压大功率,可靠性高,转矩脉动小,效率高,控制资源多等等.由于这些突出的优点,20世纪80年代以来,随着现代电力电子技术和控制理论的飞速发展,多相电机越来越受到广泛的关注,多相电机的应用潜力也越来越多地被发掘出来.
如今,多相电机系统已经越来越多地应用在如船舶推进,电动汽车等领域.2007年下水的英国皇家海军T45型驱逐舰,采用了阿尔斯通公司制造的十五相感应电机作为推进动力,功率达到了19 MW,转速150 r/min[4-5].美国大西洋舰队“马金岛号”两栖攻击舰则采用了2台5 000马力的多相电机作为辅助动力[6].在电动汽车领域,通用汽车,雷诺汽车,福特汽车公司等在内的大型汽车生产企业越来越重视多相电机在纯电动汽车中的应用,据调查,近几年这些大型汽车生产企业申请的关于多相电机的专利数也有所增加.
3次谐波,5次谐波和7次谐波的大量存在是造成电机控制性能下降的重要因素,在三相电机中,星形接法能够抑制3次谐波,而在多相电机中,则没有这个优势.国内外的专家学者也针对多相电机的谐波问题进行了研究:如从电机设计的角度出发,改变中性点接法、极槽匹配与绕组分布来降低谐波含量[7],从控制策略角度,采用将电流解耦到不同谐波平面控制谐波[8]等方法.本文从多相永磁同步电机控制系统的特性入手,研究了多相电机的PWM技术,详细阐述了几种PWM技术的原理,并在理论推导的基础上进行了仿真研究,对比分析了几种PWM技术.
随着相数的增加,从电机控制的角度看,多相电机呈现出了与三相电机截然不同的特性[8-11].三相电机的矢量控制中仅用到23=8个矢量,而n相电机则有2n个矢量,十五相电机就有215=32 768个矢量.如此多的矢量在增加控制资源的同时,也增加了控制的难度,对控制算法提出很高的要求.
在15相逆变器中,一共有215=32 768个矢量,显然,用所有的32 768个矢量组合来进行控制是不现实的[12].而如图1所示,逆变器一共有7种开关组合(14/1,13/2,12/3,11/4,10/5,9/6,8/7),而在每种开关组合中,只有当电压矢量中的0或者1是连续的情况下,才会产生这个组合里的最大矢量,这样的矢量一共有30×7= 210种,如何利用这210个矢量来进行控制,是区分不同PWM技术的关键,按照使用的矢量组合不同,可以分为最大矢量SVPWM技术,多维空间矢量SVPWM技术和基于载波的PWM技术.

图1 十五相逆变器的开关组合
1 最大矢量SVPWM技术
上文所述的210个非零矢量,共分为7组,如图2所示其中最大的一组矢量构成了图中最外圈的30个矢量,加上两个零矢量,共32个矢量,这一组矢量由图1所示的8-7开关组合产生.在这种方法中,某一时刻的参考电压合成,只选用相邻两个最大矢量作为基本矢量,如图2中圈出.
这种只用30个最大的一组矢量和2个零矢量的SVPWM技术,称为最大矢量SVPWM技术,具体推导过程如下.
1.1 列出各矢量开关状态
各矢量对应的开关状态所对应的空间矢量如图3和表1所示.
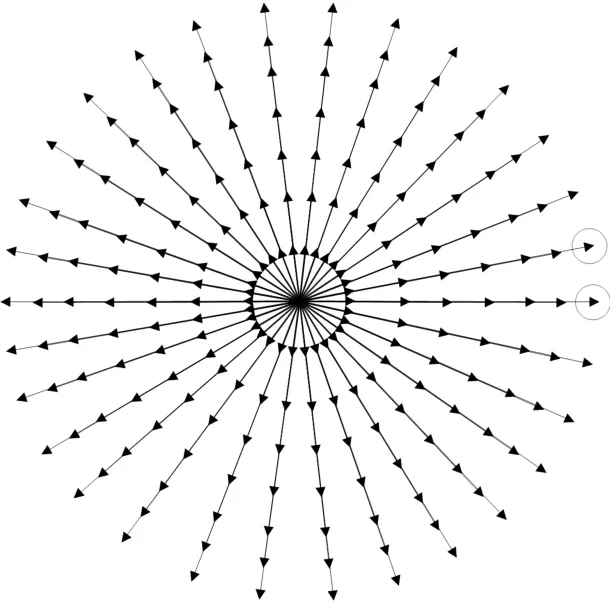
图2 十五相逆变器矢量分布
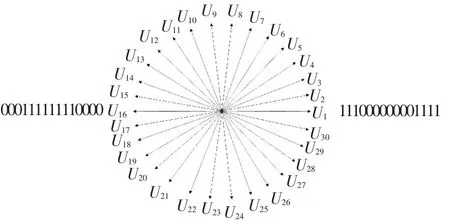
图3 最大矢量分布图和对应开关状态
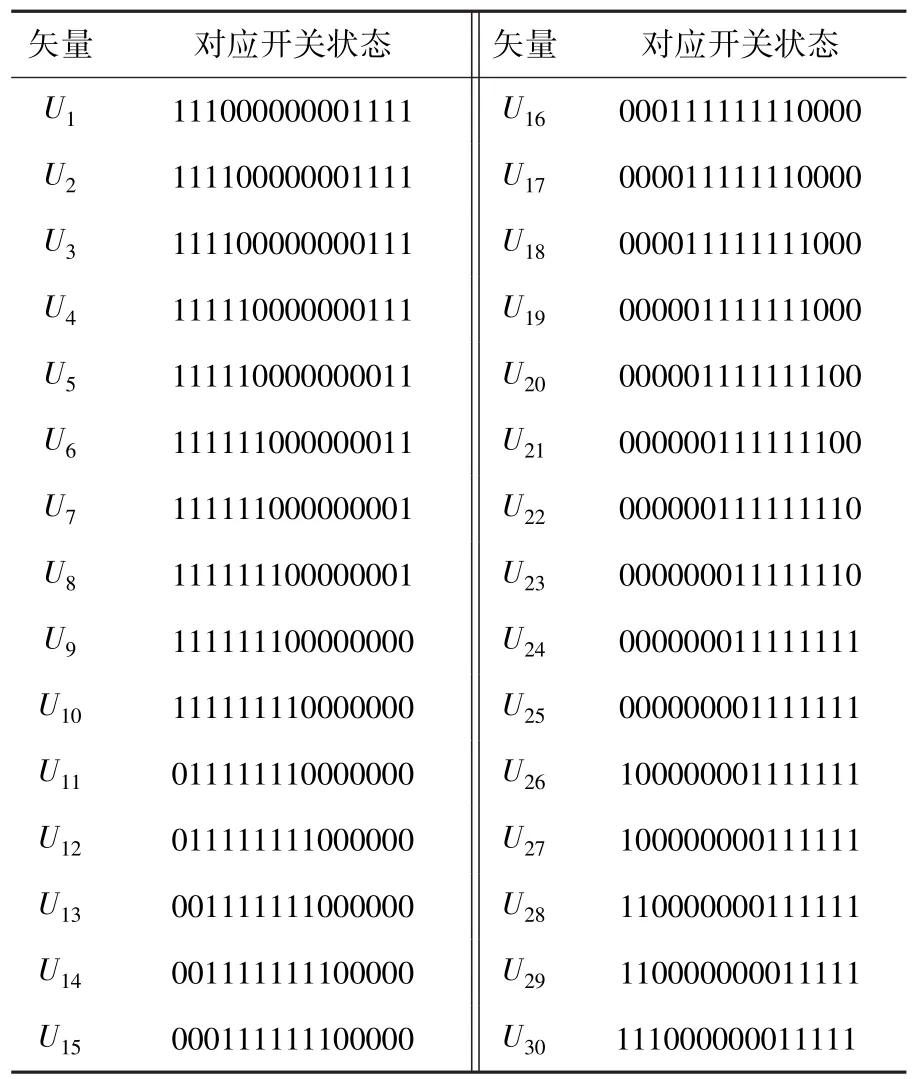
矢量对应开关状态矢量对应开关状态U1111000000001111 U16000111111110000 U2111100000001111U17000011111110000 U3111100000000111U18000011111111000 U4111110000000111U19000001111111000 U5111110000000011U20000001111111100 U6111111000000011U21000000111111100 U7111111000000001U22000000111111110 U8111111100000001U23000000011111110 U9111111100000000U24000000011111111 U10111111110000000U25000000001111111 U11011111110000000U26100000001111111 U12011111111000000U27100000000111111 U13001111111000000U28110000000111111 U14001111111100000U29110000000011111 U15000111111100000U30111000000011111
1.2 利用给定的Uα、Uβ判断扇区
图4给出了30个扇区分布图,从图中可以看出:|Uout|>Uα>|Uout|cos 12°且|Uout|sin12°>Uβ>0时,判断Uout在第1扇区,如图5所示.
同理可以推算得到其余29个扇区的判断条件,在这里不一一累述.
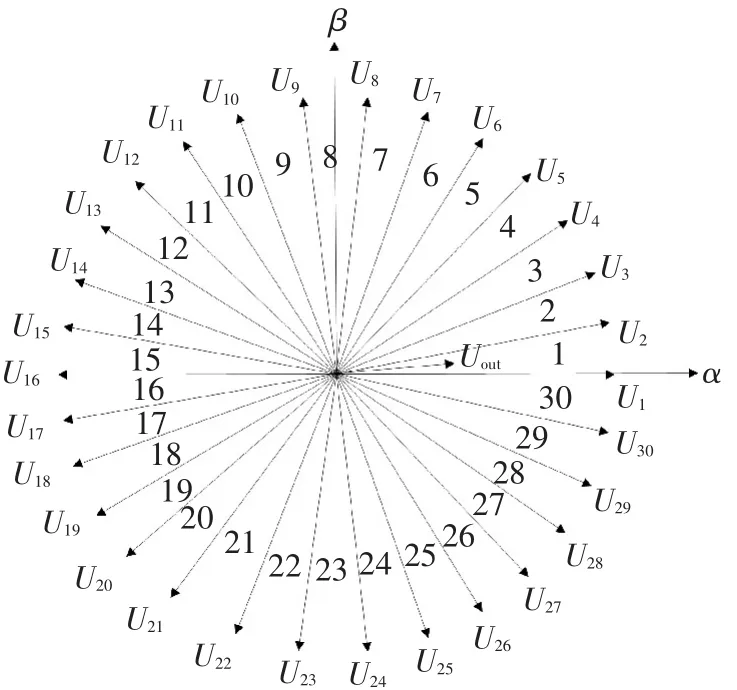
图4 扇区分布图
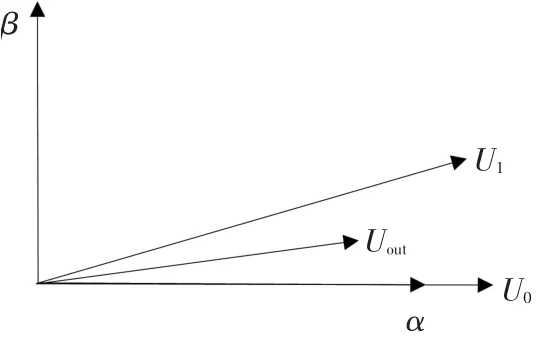
图5 第一扇区矢量合成示意图
1.3 计算各扇区内相邻矢量的导通时间
判断得到给定电压矢量的所在扇区后,需要计算该扇区内,相邻两个矢量的导通时间,在第一扇区时
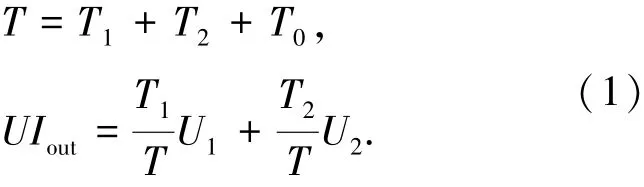
投影到α,β平面,有
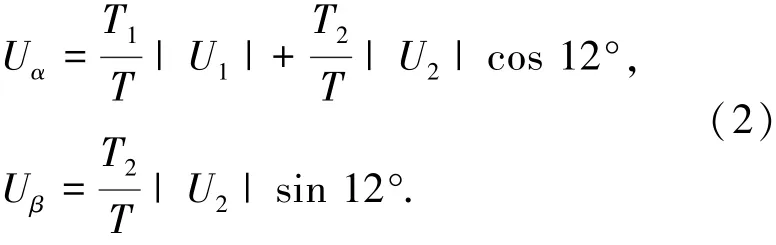
解出导通时间为

依此类推,在第n扇区(n<30)时


解出导通时间为

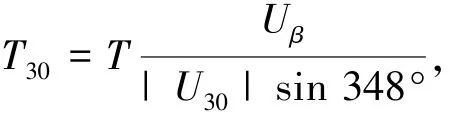
Tn为Un的作用时间,Tn+1为Un+1的作用时间,在第30扇区时,如图6所示.

图6 第30扇区矢量合成示意图

解出导通时间为

1.4 计算开关开通时刻
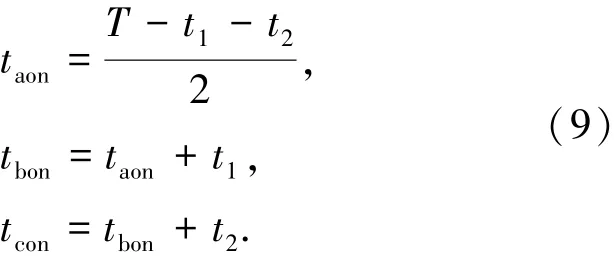
t1、t2分别为扇区内前一矢量和后一矢量的作用时间与开关周期的比值.由于不同扇区内,矢量的作用顺序不同,一般选择导通开关管少的矢量先作用,这样在一个周期内开关状态才能对称(例如,在扇区1内,U1先作用,U2后作用,在扇区2中,U3先作用,U2后作用),不同扇区内的t1、t2由表2得到.
经过以上推导过程,可以得到开关在各个扇区的动作时刻,详细的动作时刻列表如表3所示.表中,tacon,tbcon,tcon分别为各个开关在不同扇区的开通时刻,具体的开通时刻值由式(9)计算得出后进行赋值.

表2 各扇区开关开通顺序
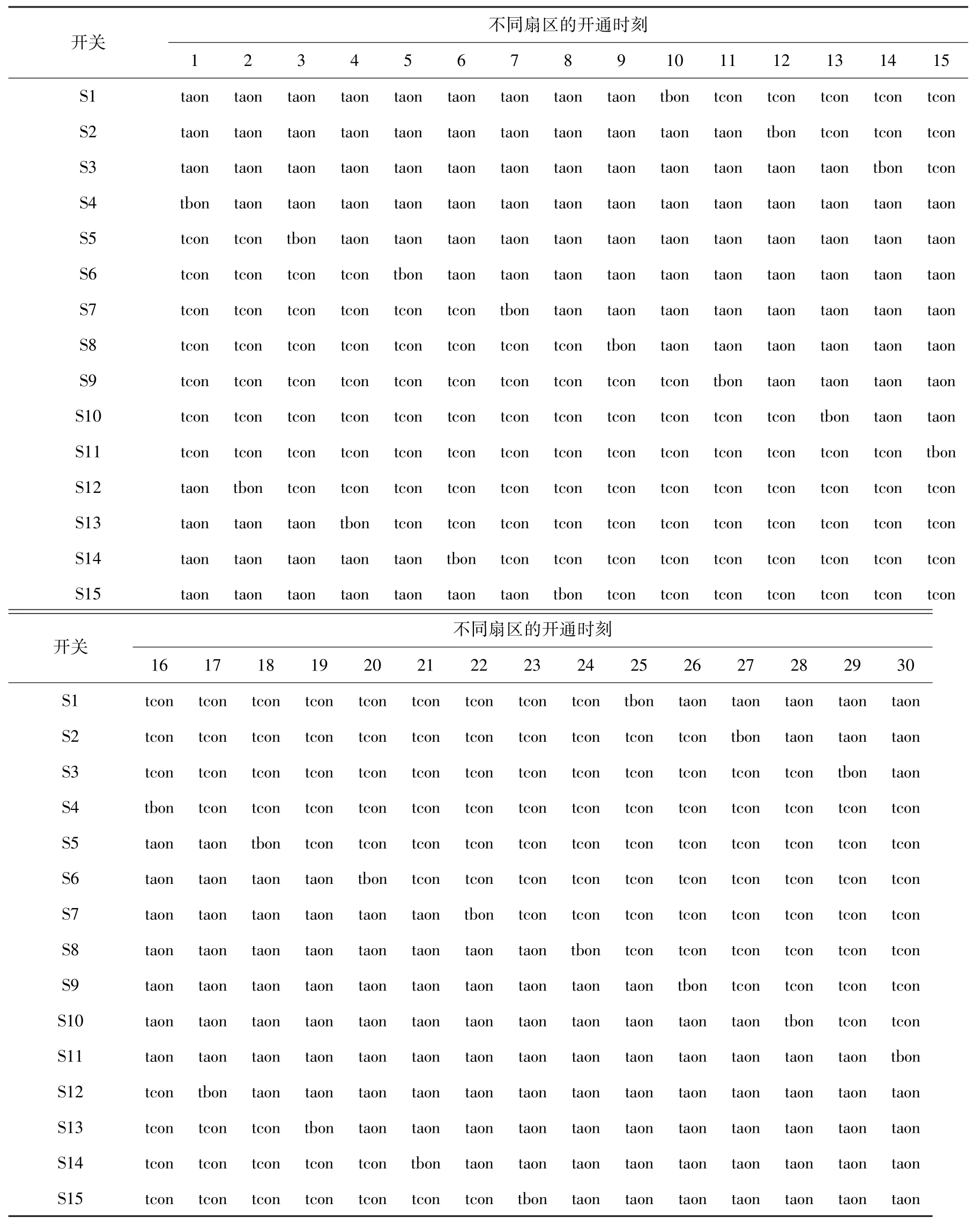
表3 开关在不同扇区的开关时刻
由以上推导过程可以看出,这种最大矢量SVPWM技术是直接由三相的SVPWM技术演变而来.其原理简单,可行性高,且随着相数增多,电压利用率越来越高(三相时为0.9069,十五相时为0.9963).但其缺点是随着相数的增加,相电压调制波越来越接近于梯形波,所以在定子电流中会产生幅值较大的低次谐波,而这种调制方法对谐波电流几乎无法控制.
2 空间多维矢量SVPWM技术
如图7所示,空间矢量多维SVPWM的原则是:1)选取所有7组最大矢量集合中的矢量作为基本电压矢量,如图7中圈出位置.2)根据给定电压空间矢量的位置,选择其两侧子集中的电压矢量和零矢量合成给定的电压矢量.空间矢量多维SVPWM调制波更接近于正弦波,可以解决传统SVPWM谐波较大的缺点,但仍存在选择的基本矢量多,算法复杂的缺点,计算开销随着相数增加急剧增大,实际系统中很少采用,而这种PWM技术可以由基于载波的的多相PWM技术更简便地实现.

图7 空间矢量多维SVPWM各矢量示意图
3 基于载波的多相PWM技术
如果将SVPWM的调制波以其他方式计算得出,再利用基于载波的PWM,就简单得多.所以本文先从基于载波的三相PWM技术入手,将其推广到十五相电机控制系统中.
如图8(a)所示,在一个采样周期Ts内,有效电压输出为Teff,只有在Teff内才有逆变器到负载的有功功率流动,而Teff在Ts中的位置也不影响有功输出.本文定义三相关断时刻分别为Tas,Tbs和Tcs,载波周期内输出的平均电压应该等于参考电压,因此有
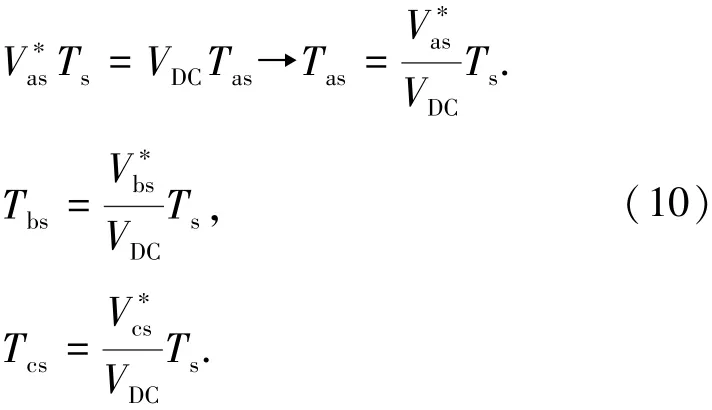
图8 逆变器在一个载波周期内的开关状态
只要能找Tas,Tbs,Tcs中最大的一个值max(Tas,Tbs,Tcs)和最小的一个值min(Tas,Tbs,Tcs),Teff就可以按如下式得到.

引入一个偏移量Toffset描述Teff的位置,有

7段式SVPWM中,两段零矢量的作用时间t0和t7可以由下式得到

为了减少开关次数,一般令t0=t7,所以可以得到

基于载波的三相PWM流程归纳如下:1)根据当前参考电压矢量Vds和Vqs,变换得到Vas,Vbs和Vcs.2)根据式(10)计算Tas,Tbs,Tcs,根据式(11)计算Teff.3)根据式(15)计算Toffset,得到Toffset后,根据式(12),(13)计算这样就确定了三相桥臂的开通和关断时间.
根据以上步骤,可以很容易地将基于载波的三相PWM技术推广到十五相,基于载波的十五相PWM技术如图9所示.

图9 基于载波的十五相PWM技术框图
4 不同PWM技术分析
上文介绍了适用于多相电机控制系统中的三种PWM技术,最大矢量PWM技术,空间矢量多维SVPWM技术和基于载波的多相PWM技术,其中空间矢量多维SVPWM由于其算法过于复杂,并且这种算法完全可以由基于载波的多相PWM技术用简化的算法达到其效果,所以本文对最大矢量SVPWM技术和基于载波的多相PWM这两种PWM技术进行研究.
图10和表4给出了两种PWM技术产生的调制波波形和谐波分析,A为调制波幅值,t为时间,P为各次谐波含量所占百分数,H是谐波次数.可以看出,最大矢量PWM技术发出的调制波波形接近梯形波,含有较大含量的谐波.载波PWM技术所发出的调制波接近正弦波,谐波含量极少.
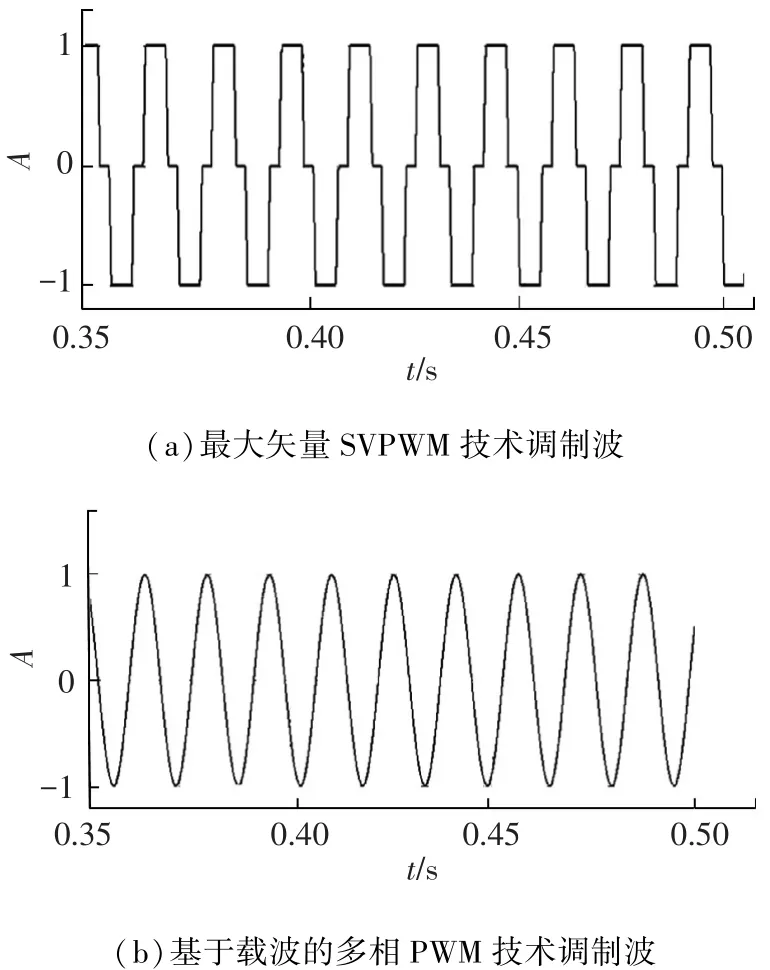
图10 两种PWM调制波
可以说,载波PWM技术具有谐波含量低的明显优势,但其低谐波含量,高正弦度,是以牺牲逆变器电压利用率为前提的.同时,载波PWM作为空间矢量多维SVPWM技术的一种简化算法,虽然对复杂的SVPWM算法进行了简化处理,但其调制波的计算和产生过程仍比最大矢量SVPWM技术复杂得多.

表4 两种PWM技术调制波的各次谐波含量和总谐波含量
4 系统仿真分析
如图11所示,本文对十五相永磁同步电机矢量控制系统进行仿真,以研究不同的PWM技术对整个控制系统的影响.其中的PWM发生模块为最大矢量SVPWM模块或基于载波的多相PWM模块.图12则给出了分别采用两种PWM技术时,电机的相电流波形和谐波分析,其中Ip是电机相电流,t是时间,P是谐波含量占百分比,H是谐波次数.表5列出了采用两种PWM技术时,电机电流的各次谐波所占百分比和总的波形畸变率.
从电机控制系统的仿真结果来看,采用最大矢量SVPWM技术的电机,电流波形谐波含量较大,而采用基于载波的多相PWM技术控制的电机电流波形谐波含量小.
通过理论分析和仿真可以看出,最大矢量SVPWM是三相电机SVPWM到多相电机的简单推广,当相数增加到十五相时,其调制波谐波含量很大,如果应用于电机控制系统,就会造成如图12给出的效果,电流谐波含量高,这必定会造成电机控制系统效率低,发热严重,转矩脉动大,控制精度低等影响,而采用基于载波多相的PWM技术时,其调制波更接近于正弦,控制电流谐波较低.所以,在十五相电机控制系统中,基于载波的多相PWM技术更具有应用优势.
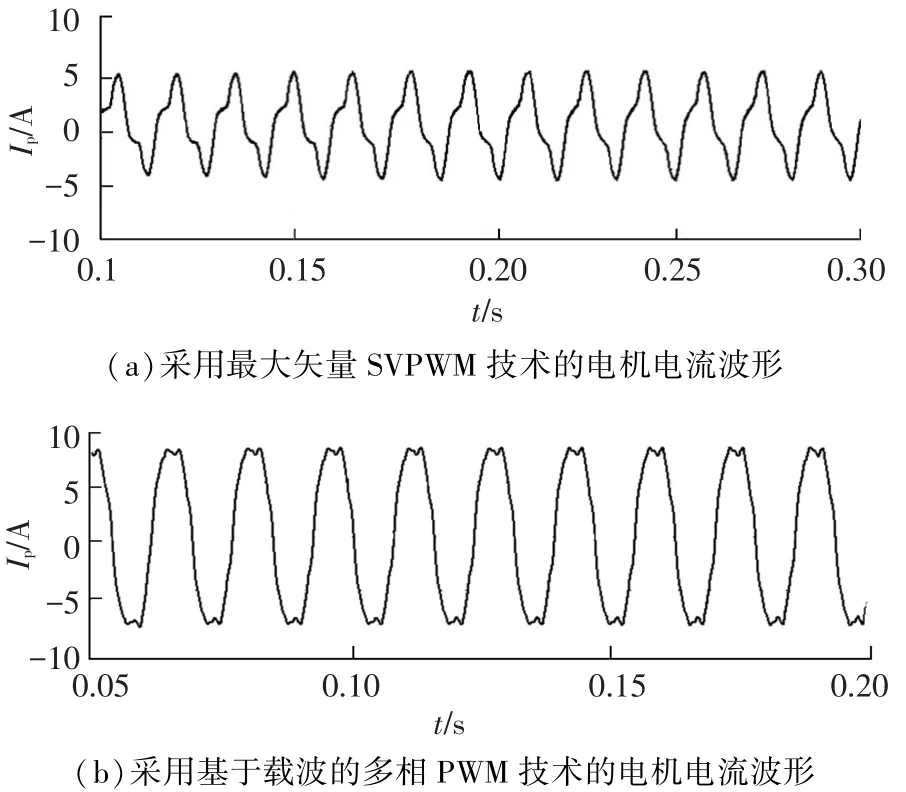
图12 采用两种PWM技术的电机波形
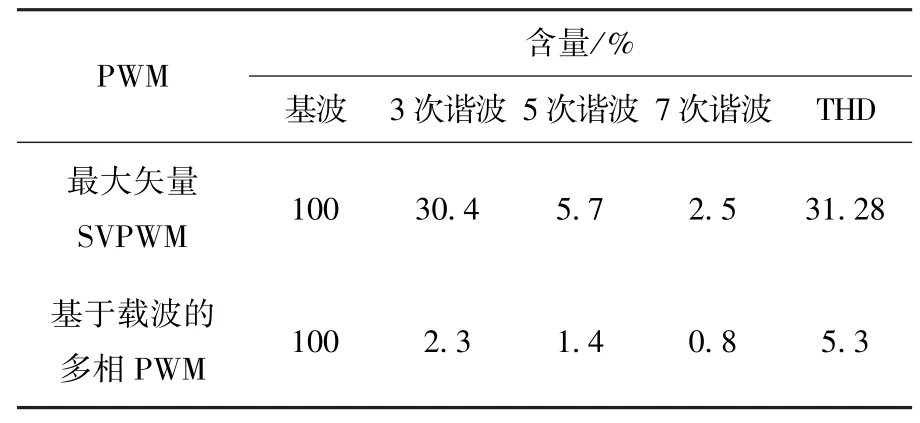
表5 采用不同PWM技术时电机电流分析
5 结 论
1)研究了几种适用于多相电机的PWM技术,阐述了这几种PWM技术的产生原理,并且对其中的最大矢量SVPWM技术和基于载波的多相PWM技术进行了研究和仿真实验.
2)最大矢量SVPWM技术发出的调制波接近梯形波,含有大量的3、5、7次谐波,调制波谐波总含量较大.基于载波的多相PWM发出的调制波接近正弦波,谐波总含量很小.
3)采用最大矢量SVPWM技术的电机,电流波形谐波含量较大,而采用基于载波的多相PWM技术控制的电机电流波形谐波含量小.
4)最大矢量SVPWM技术原理简单,易于实现,基于载波的多相PWM技术比较复杂.而且,基于载波的多相PWM技术控制带来的低谐波含量,高电流正弦度是以增加软件复杂度,提高硬件资源消耗,牺牲逆变器电压利用率为代价的.
[1]薛山.多相永磁同步电机驱动技术研究[D].北京:中国科学院研究生院,2005.
[2]LEVI E,JONES M,VUKOSAVIC S N,et al.Operating principles of a novel multiphase multimotor vectorcontrolled drive[J].IEEE Transactions on Energy Conversion,2004,19(3):508-517.
[3]王又珑.十五相感应电机磁场分析及驱动技术研究[D].北京:中国科学院研究生院,2009.
[4]FERREIRAL,AERREIRAR,BUCKNALLD. Modelling and real-time simulation of an advanced marine full-electrical propulsion system[C]//Power Electronics,Machines and Drives 2004.Edinburgh: IEEE,2004:574-579.
[5]CLIVE L.The advanced induction motor[C]//Power Engineering Society Summer Meeting.Chicago:IEEE,2002:250-253.
[6]CNO Executive Board.Excutive summary roadmap to an electric naval force[R].Arlington:Naval Research Advisory Commitfee,2001.
[7]方程,许海平,薛劭申,等.直驱型多相永磁同步电机定子磁动势与气隙磁密特性分析[J].中国电机工程学报,2013(24):106-113.
[8]汤浩.九相感应电机矢量控制系统的研究[D].杭州:浙江大学,2013.
[9]LEVI E.multiphase electric machines for variable-speed applications.industrialelectronics[J].IEEE Transactions on Industrial Electronics,2008,55(5): 1893-1909.
[10]LEVI E,BOJOI R,PROFUMO F,et al.Multiphase induction motor drives:a technology status review[J]. Electric Power Applications,IET,2007,1(4):489-516.
[11]侯立军.多相感应电机变频调速系统的研究[D].西安:西安交通大学,2003.
[12]侯立军,苏彦民,陈林.基于DSP的多相感应电机矢量控制系统的设计和实现[J].电气自动化,2002(5):4-7.
(编辑 魏希柱)
Study of the PWM technology of multiphase permanent magnet synchronous motor
XUE Shaoshen1,XU Haiping1,FANG Cheng1,HUANG Qinpeng1,2,XUE Shan1
(1.Institute of Electrical Engineering,Chinese Academy of Science,100190 Beijing,China;2.School of Electronic,Electrical and Communication Engineering,University of Chinese Academy of Sciences,100049 Beijing,China)
In order to solve the harmonic issues that exist in multiphase motor systems normally,and find the appreciate approach PWM technology for decreasing the total harmonic distort(THD),this paper studied several PWM technologies which can be used in multiphase motor’s control systems:the maximum vector SVPWM,the space multidimensional vector SVPWM and the carrier-based multiphase PWM,the principle and the implement method of these PWM technologies were given.This paper analyzed the 15-phase permanent magnet synchronous motor control system by Matlab/Simulink model,the simulation results indicated that the motor phase current which used the Carrier-based multiphase PWM has lowest content of harmonics and better performance.
multiphase motor;15-phase permanent magnet synchronous motor;multiphase PWM technology;vector control;carrier-based PWM
TM351
A
0367-6234(2014)04-0122-07
2013-02-27.
国家自然科学基金资助项目(50907064).
薛劭申(1986—),男,博士,研究实习员;
许海平(1971—),男,研究员,博士生导师.
许海平,hpxu@mail.iee.ac.cn.
猜你喜欢
南北桥(2022年2期)2022-05-31
哈尔滨铁道科技(2020年4期)2020-07-22
电脑知识与技术·经验技巧(2017年9期)2018-02-24
西南交通大学学报(2016年4期)2016-06-15
计算机技术与发展(2016年10期)2016-02-27
西部广播电视(2015年10期)2016-01-18
电测与仪表(2015年12期)2015-04-09
电测与仪表(2014年15期)2014-04-04
电测与仪表(2014年14期)2014-04-04
电测与仪表(2014年2期)2014-04-04
