
基于模糊PID控制的半导体激光器温控系统
2014-06-07 07:15:49尧思远
激光与红外 2014年1期
左 帅,和 婷,尧思远
(华北光电技术研究所,北京100015)
基于模糊PID控制的半导体激光器温控系统
左 帅,和 婷,尧思远
(华北光电技术研究所,北京100015)
基于模糊控制原理,采用模糊控制与PID控制相结合的模糊控制方法,完成了一种针对半导体激光器温度控制的算法设计。该模糊PID控制算法,能够自适应调节PID的比例、积分和微分系数,从而使半导体制冷器的温度保持恒定。Simulink仿真结果表明,采用该模糊PID控制算法后系统的超调量减少40%,缩短了调节时间,控制效果优于常规PID控制系统。
模糊控制;PID控制;温度控制;Simulink
1 引 言
温度变化对半导体激光器输出波长有很大影响,因此需要对半导体激光器进行温度控制[1]。传统温度控制采用PID控制,PID具有结构简单、易实现、性能良好等优点。PID控制的一个关键问题是PID参数整定,需要在获得控制对象的数学模型的基础上依据某种原则进行整定。但实际控制过程往往具有非线性和时变性,精确的数学模型难以获得,同时在实际操作中,由于常规PID参数整定方法繁杂,其参数往往整定不良、性能欠佳、适应性差,因此传统的PID控制在自适应性和鲁棒性等方面往往不能满足系统性能要求[2-3]。
为克服上述缺点,经过几十年的研究发展,人们在PID参数整定方面提出一些新的方法,出现了如自校正PID,预估PID、模糊PID、神经网络PID和非线性PID等改进型的控制器。其中,模糊PID控制器是本文的研究设计内容。
模糊控制是用模糊数学的知识模仿人脑的思维方式,对模糊现象进行识别和判决,给出精确的控制量,对被控对象进行控制,具有算法简单、易于掌握,且无须知道被控对象的精确模型,具有较好动态特性,已经得到了广泛地应用。本文将模糊控制和PID控制结合起来,构建自适应模糊PID控制器,可以自适应改变PID参数,增强PID控制的性能。
2 模糊PID控制原理
模糊PID控制是在一般PID控制系统的基础上,加上一个模糊控制环节,利用模糊控制规则在线对PID参数进行修改的一种自适应控制系统。其实现思想是先找出PID各个参数与偏差e和偏差变化率Δe之间的模糊关系,在运行中通过不断检测e和Δe,再根据模糊控制原理来对各个参数进行在线修改,以满足在不同e和Δe时对控制参数的不同要求,使控制对象具有良好的动、静态性能,且计算量小,易于用单片机实现[4]。
2.1 模糊PID控制系统结构
模糊PID控制系统主要由参数可控式PID系统和模糊控制系统两部分组成,其原理如图1所示[5]。参数可控式PID控制器完成对系统的直接控制,模糊控制器实现对PID三个控制参数(KP、Ki及Kd)的在线自动修正。
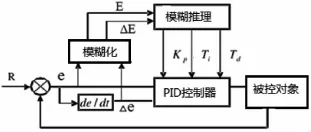
图1 模糊PID控制系统原理图
2.2 PID参数调整规则
数字增量式PID控制器一般用以下函数表示[6]:

式中,e(k)为设定量和实际输出量之间的偏差;Δe(k)为偏差变化;Kp为比例作用系数,影响系统响应速度和精度;Ki为积分作用系数,影响系统稳态精度;Kd为微分作用系数,影响系统动态特性。
采用扩充临界比例度法整定数字PID控制器参数,具体方法如下[7]:
1)选择一合适的采样周期Tmin。此采样周期应足够小,一般小于对象的纯滞后时间的1/10;
2)确定采样周期Tmin后,控制器作纯比例控制,逐渐增大比例系数Kp直至出现等幅振荡,记此时的比例系数和振荡周期分别为Kr和Tr;
3)选择控制度。控制度定义为数字控制系统误差平方的积分与对应的模拟控制系统误差平方的积分之比,当控制度为0.5时,认为数字控制与模拟控制效果相同;
4)选择控制度后,按下表来确定采样周期T、比例系数Kp、积分时间常数Tr和微分时间常数Td。临界比例法PID参数整定表如表1所示。

表1 临界比例法PID参数整定表
3 模糊PID控制器设计
本设计采用二维模糊控制器,即以e和Δe为控制输入变量,输出分别为PID三个参数Kp、Ki和Kd,构成一个两输入三输出的模糊控制器。
3.1 模糊化设计
为了能够进行模糊控制,首先要对确定数值的输入、输出变量进行模糊化处理,使之成为模糊语言变量值。本设计中所有输入、输出变量均采用7档进行模糊划分,即NB(负大)、NM(负中)、NS(负小)、ZO(零)、PS(正小)、PM(正中)、PB(正大)。由于隶属函数的形状对模糊控制的控制效果影响不大,本设计选用三角形,在两端选为梯形。
3.2 模糊控制规则
模糊控制规则是模糊控制器进行模糊推理的依据,是根据人的思维方式对一个被控系统执行控制而总结出来的带有模糊性的控制规则。它需要根据实际控制器结构,结合大量的观察和试验数据,或专家知识与操作熟练的人员的经验来总结提取,从而形成一系列用模糊条件句描述的模糊控制规则。
根据经验,针对不同的e和Δe,PID参数Kp、Ki和Kd按以下规则调整[8]:
1)当e较大时,应取较大的Kp以加快系统响应速度,取较小的Kd以避免偏差e的瞬间变大可能引起微分过饱和,取Ki=0即去掉积分作用以防止积分饱和,避免系统响应出现较大的超调;
2)当e和Δe中等大小时,为减小系统响应超调量,Kp、Ki和Kd都不能取大,Kp值应取较小,Ki和Kd值应大小适中,以保证系统的响应速度;
3)当e较小,应增大Kp和Ki值以保证系统具有良好的稳定性,考虑到系统抗干扰能力以及避免在设定值附近出现振荡,应适当的选取Kd值:当Δe较小时,Kd可取较大值,一般取中等大小;当Δe较大时,Kd应取较小值。
依据以上原则,制定PID各参数的模糊控制规则表,如表2、表3、表4所示。表中实际变量e、Δe、Kp、Ki和Kd对应的模糊语言变量分别为E,EC,KP,KI和KD。
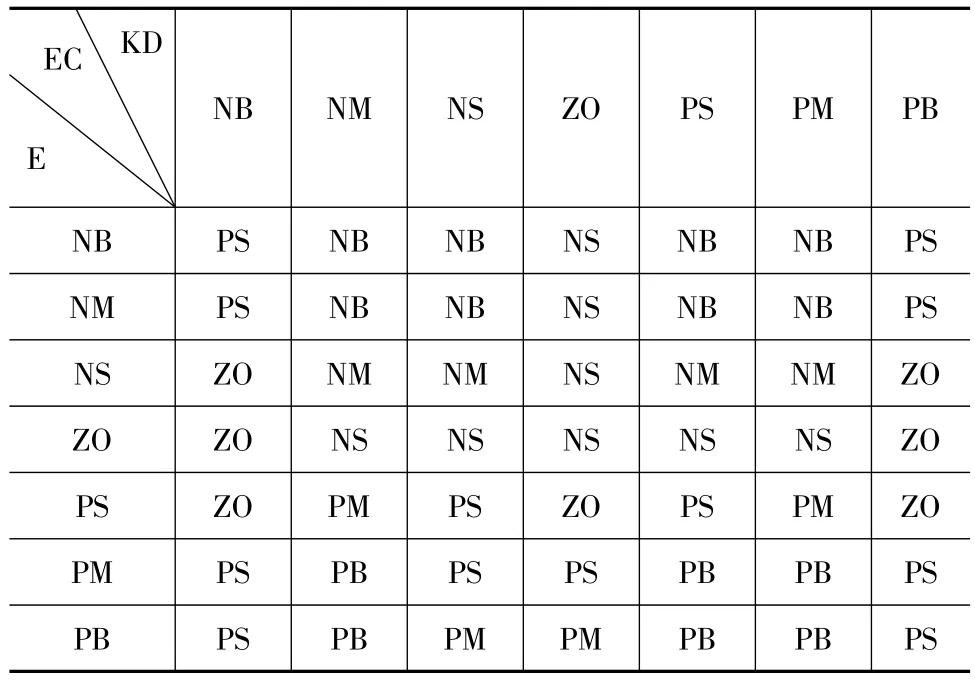
表4 模糊控制规则表
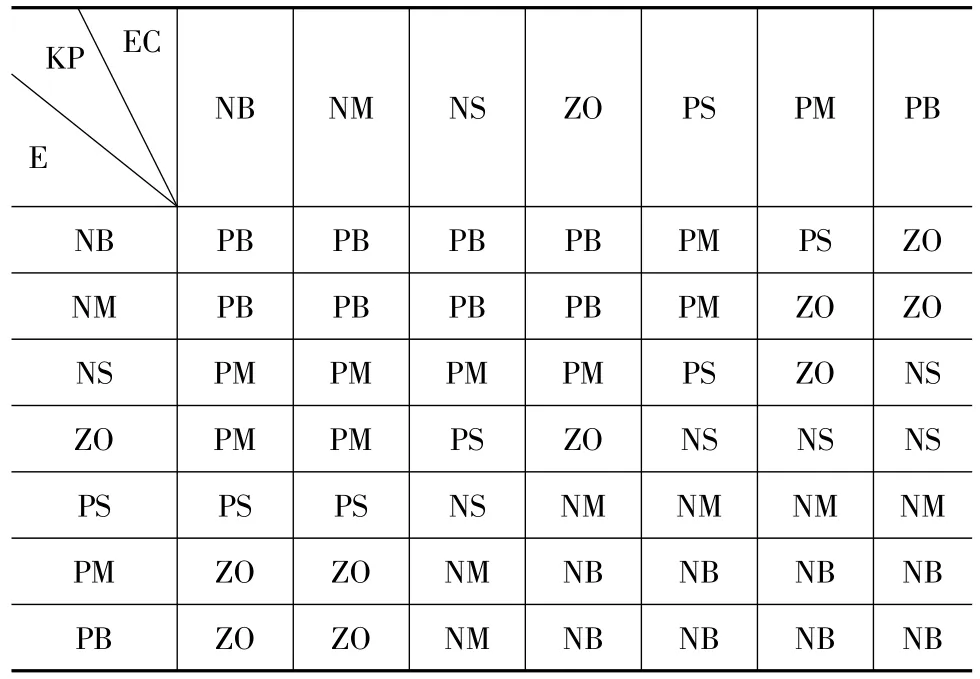
表2 模糊控制规则表
以上设计可以借助matlab工具箱FUZZY来完成,如图2所示。输入为模糊变量E和EC,输出为模糊变量KP、KI和KD。使用Edit/add rule菜单可以把以上表中控制规则输入进去。

表3 模糊控制规则表
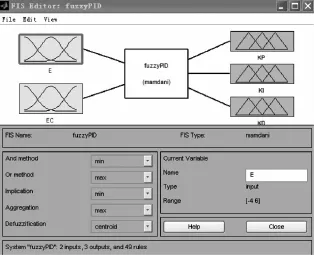
图2 模糊控制工具箱
4 系统仿真及结论
通过Matlab的Simulink工具箱对系统进行建模仿真。本文采用被控对象的数学参考模型[9-11],为了同比较PID控制效果相比较同时搭建两路,一路为PID控制,另一路为加入模糊控制的模糊PID控制,如图3所示。

图3 模糊控制仿真原理图
其中,PID参数的整定采用Ziegler-Nicholas整定法,具体方法是:先对系统只做纯比例控制,将积分控制和微分控制系数置为零,比例增益系数从小到大逐渐增大直至系统响应出现等幅振荡临界状态,记下此时的比例增益系数Km,同时从等幅振荡曲线上可以得到临界周期Tm。根据得到的Km和Tm两个参数,利用经验公式:Kp=0.6 Km,Ki=2/Tm,Kd=0.125 Tm来计算控制器参数。
PID控制和模糊PID控制的单位阶跃响应仿真结果如图4所示,从图中可以看出,PID控制的超调量为70%,采用模糊PID控制后超调量减小了40%,振荡次数也大幅减少,调节时间相应减小。由此可得结论:本文针对半导体激光器温控系统,提出一种基于模糊控制原理的模糊PID控制器,通过matlab仿真实验证明该控制系统能够自适应地调节由于PID比例、微分、积分系数,从而减小系统的超调量,缩短调节时间。
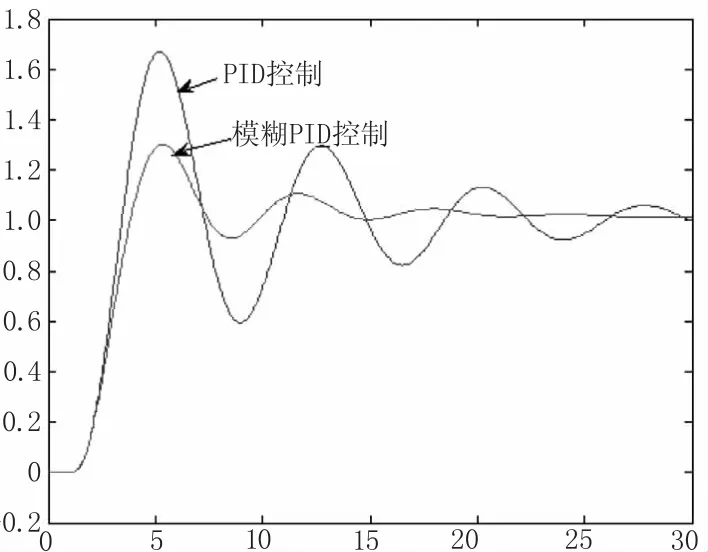
图4 PID控制和模糊PID控制单位阶跃响应曲线
[1] Zeng Hualin,Jiang Pengfei,Xie Fuzeng.Temperature control of semiconductor laser for interferometry[J].Laser&Infrared,2004,34(5):339-340.(in Chinese)曾华林,江鹏飞,谢福增.半导体激光器温度控制研究[J].激光与红外,2004,34(5):339-340.
[2] LüJunxia.Design&research of temperature control system based on fuzzy PID[J].Precise Manufacturing&Automation,2010,2:23-26.(in Chinese)吕俊霞.基于模糊PID的温度控制系统设计与分析[J].精密制造与自动化,2010,2:23-26.
[3] Tang Hongcheng,Li Zhuxin,Wang Zhengtao,etal.A fuzzy PID control system[J].Electric Machines and Control,2005,3:136-138.(in Chinese)汤红诚,李著信,王正涛,等.一种模糊PID控制系统[J].电机与控制学报,2005,3:136-138.
[4]Zhu Jing.Principles and applications of Fuzzy control[M]. Beijing:China Machine Press,2005.(in Chinese)诸静.模糊控制原理与应用[M].北京:机械工业出版社,2005.
[5] Zheng Xuemei.Fuzzy PID controller structure[J].Journal of Daqing Petroleum Institute,2000,24(3):46-50.(in Chinese)郑雪梅.模糊PID控制器结构[J].大庆石油学院学报,2000,24(3):46-50.
[6] Hu Shousong.Automatic control theory[M].Beijing:Science Press,2001.(in Chinese)胡寿松.自动控制原理[M].北京:科学出版社,2001.
[7] Kong Feng.Microcomputer control technology[M]. Chongqing:Chongqing University Press,2003.(in Chinese)孔峰.微型计算机控制技术[M].重庆:重庆大学出版社,2003.
[8] Su Ming,Chen Lunjun,Lin Hao.Study of fuzzy PID control[J].Modern Machinery,2004,4:51-55.(in Chinese)苏明,陈伦军,林浩.模糊PID控制及其MATLAB仿真[J].现代机械,2004,4:51-55.
[9] Zhang Xinyi,Zhang Jianjun.Modeling analysis and optimization design of the thermostatical control system of laser instrument of the semiconductor[J].Control and Automation Publication Group,2008,24(1):268-270.(in Chinese)张新义,张建军.半导体激光器恒温控制系统的建模分析及优化设计[J].微计算机信息,2008,24(1):268-270.
[10] Geng Rui.Computer simulation of the self-adaptive fuzzy PID control system based on MATLAB[J].Information technology,2007,1:43-46.(in Chinese)耿瑞.基于MATLAB的自适应模糊PID控制系统计算机仿真[J].信息术,2007,1:43-46.
[11]Fan Jizhong.Study of laser diode temperature control technology[D].Xi’an:Xi’an University of Technology,2005.(in Chinese)范吉中.半导体激光器温度控制技术的研究[D].西安:西安理工大学,2005.
Temperature control system for sem iconductor laser based on fuzzy PID
ZUO Shuai,HE Ting,YAO Si-yuan
(North China Research Institute of Electro-optics,Beijing 100015,China)
Based on theory of fuzzy control,a combination method of fuzzy control and PID control is used,which is known as fuzzy PID control.A semiconductor laser temperature control system design is completed.It can adaptively adjust PID proportional,integral and differential coefficient to keep the semiconductor cooler’s temperature constant.The simulation results of Simulink show that,after using the fuzzy PID control algorithm the overshootof the system is reduced by 40%,the adjustment time is shorten and the control effect is better than conventional PID control system.
fuzzy control;PID control;temperature control;Simulink
TN248.4;TP391
A
10.3969/j.issn.1001-5078.2014. 01.021
1001-5078(2014)01-0094-04
左 帅(1988-),男,在读研究生,主要研究方向为激光测距。E-mail:82419107@qq.com
2013-09-02
猜你喜欢
军事文摘(2024年4期)2024-03-19 09:40:02
舰船科学技术(2022年20期)2022-11-28 08:22:00
科学(2020年6期)2020-02-06 09:00:06
制造技术与机床(2017年3期)2017-06-23 08:11:38
光学精密工程(2016年5期)2016-11-07 09:06:14
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
工业设计(2016年4期)2016-05-04 04:00:27
通信电源技术(2016年5期)2016-03-22 01:09:57
电源技术(2015年11期)2015-08-22 08:50:38
