
双足驱动双压电晶片直线超声波电机运行机理研究
2014-05-25 00:34徐志科蒋春容陆旦宏
振动与冲击 2014年22期
陈 强,徐志科,蒋春容,陆旦宏
(1.南京工程学院电力工程学院,南京 211167;2.东南大学电气工程学院,南京 210096)
双足驱动双压电晶片直线超声波电机运行机理研究
陈 强1,徐志科2,蒋春容1,陆旦宏1
(1.南京工程学院电力工程学院,南京 211167;2.东南大学电气工程学院,南京 210096)
研究新型直线超声波电机运行机理,采用双压电晶片及双足驱动结构,具有结构简单、无需频率简并、易于小型化等优点。详述其结构、振形特点及工作机理。建立电机定子振动响应有限元模型,给出输入阻抗计算方法。用已建模型计算获得定子驱动足接触点在谐振频率点附近振幅,推导驱动足接触点运动轨迹。通过实测定子阻抗特性将所得结果与理论分析进行比较。
直线超声波电机;双压电晶片;双足驱动;有限元模型;运动轨迹;阻抗特性
超声波电机利用压电陶瓷逆压电效应激励定子产生超声振动,将电能转化为机械能通过定子与动子间摩擦耦合方式驱动。与传统电磁电机相比,超声波电机具有低速大转矩、响应速度快、断电自锁、结构简单、噪音小、不受电磁场干扰等优点[1]。作为控制系统的执行元件在工业控制系统、半导体工业、精密仪器、航空航天、医疗、机器人等高新技术领域具有广阔的应用前景[2-3]。直线超声波电机为超声波电机重要分支,除以上述优点外亦具有无需丝杆机构运动转换直接输出牵引力、定位及速度控制精度高、结构简单、设计灵活等优点,作为重要控制系统执行元件在微机电系统中广泛应用[4-6]。
本文电机采用双压电晶片与双足驱动结构[7]。该电机结构简单体积小,易于装配各种装置;无需频率简并,设计较灵活,可进一步小型化。且双足驱动能使定子在一个工作周期内两次推动动子作直线运动,从而提高电机的输出力及工作效率。
1 电机结构与原理
1.1 电机结构
图1为双足驱动双压电晶片直线超声波电机结构,由1定子、2动子、3导轨、4底座及5预压机构组成。在动、定子驱动足接触区内将摩擦材料贴于动子面[8]。
图2为定子结构及压电陶瓷极化方向,由两组压电陶瓷片(A、B组)及弹性体组成,定子两端固定。两组陶瓷片与弹性体粘结部分接地,另一面接激励电源,激励电源频率相同相位相差90°,为使定子驱动足获得尽可能大振幅以提高电机工作效率,电源工作频率尽量接近谐振频率[9]。定子结构尺寸见表1,定子弹性体采用青铜,压电材料为PZT8。
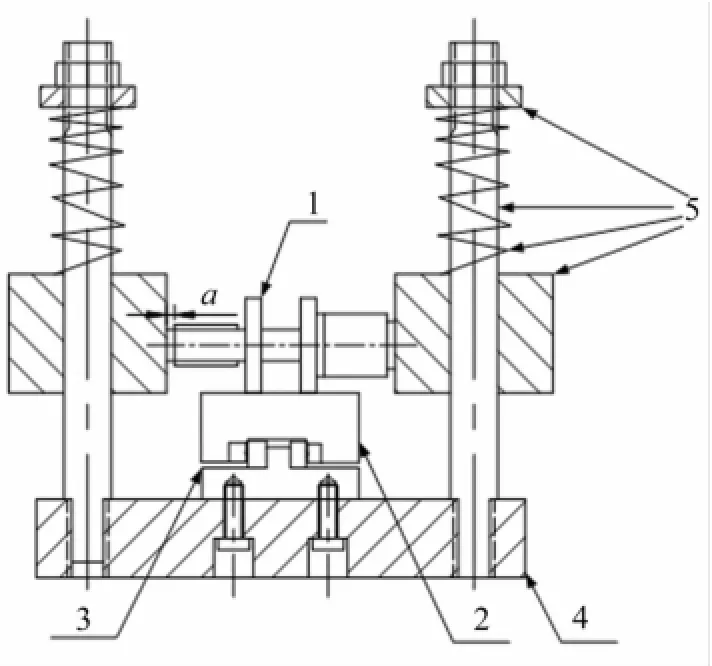
图1 双足驱动双压电晶片直线超声波电机结构Fig.1 Configuration of double-driving feet linear ultrasonic motor using bimorphs

图2 定子结构及压电陶瓷极化方向Fig.2 Structure of stator and polarization direction of piezoelectric ceramics
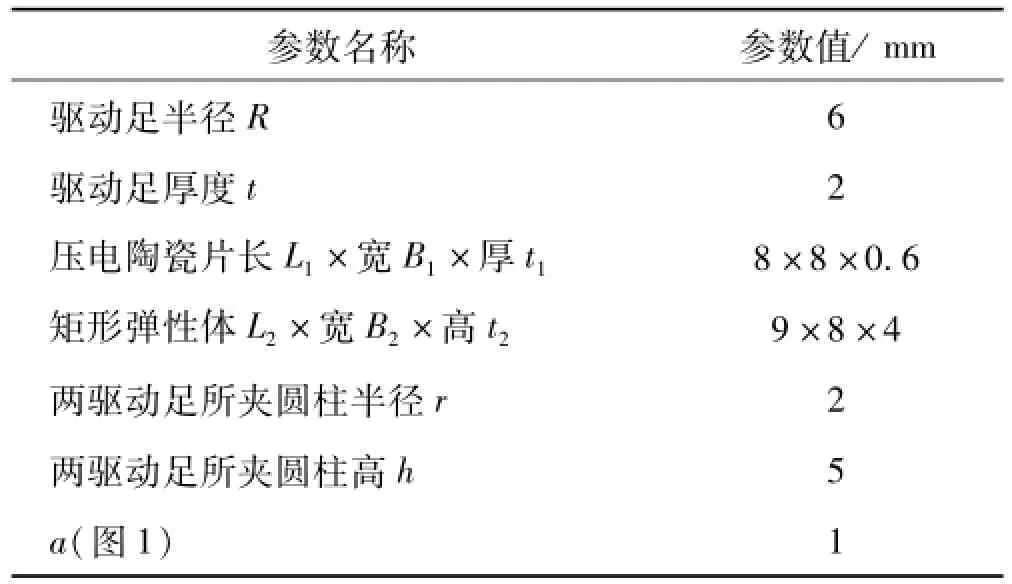
表1 定子结构尺寸参数Tab.1 Value of the stator structure parameter
1.2 定子振动模态与工作原理
定子工作模态由两正交二阶弯曲振动复合而成。用有限元软件ANSYS计算定子振动模态[10-12],所得振动模态见图3,共振频率为28187 Hz。对两组陶瓷片分别施加90°相差的激励电源,两组陶瓷片共同作用,两驱动足交替驱动动子运动。
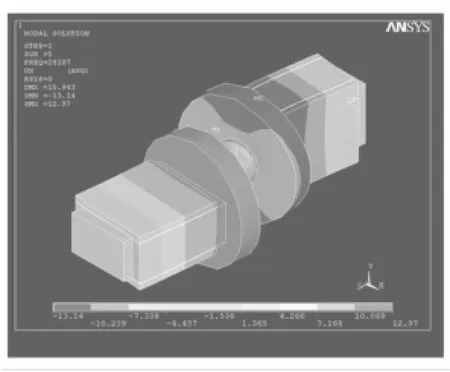
图3 定子振动模态Fig.3 Vibration modes of stator
A组陶瓷片施加的激励电源相位较B组超前90°,动子沿X负向运动,电机定子、动子接触过程及其在一周期内4个相互位置及受力见图4。对两组压电陶瓷施加激励电压时,会激起驱动足接触点X、Y、Z向振幅。由于Z向振幅不影响动子运动方向暂不考虑,将在运动轨迹中分析。通过交换两激励电源相序即可使动子反方向运动。

图4 电机工作原理示意图Fig.4 Schematic diagram of themotor’s work principle
(1)A组压电陶瓷施加激励电压相角ωt=0时,驱动足A在X正向振幅达最大,驱动足B在X负向振幅达最大,此时驱动足A、B均不驱动动子。
(2)ωt=π/2时驱动足A在Y负向振幅达最大,驱动足B在Y正向振幅达最大;此时驱动足A与动子接触,具有X负向振动速度,推动动子沿X负向运动,驱动足B与动子不接触。
(3)ωt=π时驱动足A在X负向振幅达最大,驱动足B在X正向振幅达最大,此时驱动足A、B均不驱动动子。
(4)ωt=3π/2时驱动足A在Y正向振幅达最大;驱动足B在X方向位移为,驱动足B在Y负向振幅达最大,此时驱动足B与动子接触,具有X负向振动速度,推动动子沿X负向运动,驱动足A与动子不接触。
2 定子模型分析
超声波电机工作机理主要体现于两机电能量的传递过程[13-14],即对定子振型、压电陶瓷极化与配置设计,由驱动控制电路使定子产生机电耦合振动;通过摩擦耦合将定子的机械能转为转子动能输出。在第一能量传递过程中利用谐振方式进行能量转换,电机驱动器功放部分普遍采用两相同推挽放大器,要求对电机及驱动器中变压器间阻抗匹配,本文利用有限元法对电机输入阻抗进行定量分析,并计算谐振频率点附近振幅。
2.1 模型建立
由于两组压电陶瓷能量转换模式d33方向相互垂直,定义局部坐标系X′Y′Z′及X″Y″Z″(图2),分别在两坐标系下定义A、B组压电陶瓷性质。定子两端固支,计算时设电机定子环的压电陶瓷对各自坐标系同方向极化,在施加电压载荷时可参照图2极化方向施加电压。因本文两边正交对称,因此只分析A组压电陶瓷振动响应模型。利用有限元分析软件ANSYS对电机定子进行分析,模型采用4节点3维实体耦合单元Solid98剖分电机定子,计算时需考虑电机定子结构载荷与电载荷。
2.2 输入阻抗计算
模型中电位移矢量Φ的频率变化范围为20~40 kHz,通过计算可得电机模型节点电荷值。电机电极电流[15]可表示为

式中:Qi为电机电极节点电荷;∑iQi为电机电极电荷总和。
由于激励电压为正弦规律,可认为电极电荷符合正弦规律,可表示为
在20~40 kHz频率范围内选1 000点进行计算,通过以上方法可得定子阻抗-频率特性,见图5。由图5看出,阻抗值在频率28 200 Hz时由局部最小值跃至局部最大值,该最小值对应频率位于电机定子振动谐振点附近,最大值对应频率位于反谐振点附近。
2.3 定子谐振振幅计算
由输入阻抗计算结果可知,谐振频率非常接近28 200 Hz,因此振幅计算频率范围为28 000~28 400 Hz,隔20 Hz计算一次。A、B组压电陶瓷片正交对称,只需计算A组压电陶瓷片激励振幅。在A组压电陶瓷上施加幅值为100 V的交变电压作为激励。计算得到的定子振幅在频率28 140 Hz达到最大,这一频率是所计算的频率值中最接近谐振点的,并与计算得到的阻抗最小值对应频率非常接近。当激励频率为28 140 Hz时,计算A组压电陶瓷施加激励电压时电机定子的振幅值。以驱动足A与A组压电陶瓷所夹方块的共有面的中心点为坐标系XYZ原点,驱动足A与动子相切线的两端点a1(0,-6e-3,0)、a2(0,-6e-3,2e-3)X方向振幅分别为25.6455μm及18.0013μm,Z方向振幅为19.1181μm及19.3633μm;驱动足B与动子相切线的两端点b1(0,-6e-3,7e-3)、b2(0,-6e-3,9e-3)X方向振幅分别为24.716 5μm及21.7μm,Z方向振幅为6.622 04μm及6.854 35μm。

图5 定子阻抗-频率特性曲线Fig.5 Impedance-frequence characteristic curve of stator
3 驱动足运行轨迹
对直线超声波电机关键在于如何激励压电陶瓷,使定子驱动足与动子接触点生成椭圆运动,须对定子运动进行分析。为研究接触点运动轨迹,用几何学原理据已建有限元模型计算结果分析定子运动机理,推导两相激励同时作用的定子驱动足与动子接触点运动轨迹,并证明接触点椭圆运动轨迹的存在,为优化电机接触、设计及驱动控制奠定理论基础。
定、动子通过弹簧压在一起,接触面X方向宽度较小,分析时可认为Z方向值相同接触点振幅相同。当对A组压电陶瓷施加激励电压时,驱动足接触点X、Z方向的位移分别为

对B组压电陶瓷施加激励电压时驱动足接触点Y、Z方向位移分别为

对A、B两组压电陶瓷施加激励电压时Z方向位移为

式中:ξA为A组压电陶瓷施加激励电压时驱动足接触点X方向振幅;γA为A组压电陶瓷施加激励电压时驱动足接触点Z方向振幅;ξB为B组压电陶瓷施加激励电压时驱动足接触点Y方向振幅;γB为B组压电陶瓷施加激励电压时驱动足接触点Z方向振幅;f=ω/(2π)为振动频率;φ为相位差。
由于电机定子正交对称,B组压电陶瓷施加激励电压时振幅值为ξB(z)=ξA(2t+h-z),γB(z)=γA(2t+h-z)。压电陶瓷元件激励使定子产生的振动为微小振动,满足线性叠加原理。利用有限元分析结果,结合式(4)~式(8),激励频率为28 140 Hz得φ=π/6、π/3、π/2时驱动足接触点a1、a2、b1、b2点运动轨迹曲线,见图6~图8[16]。

图6 φ=π/6时驱动足轨迹示意图Fig.6 Schematic diagram of the locus of driving feet,whenφ=π/6

图7 φ=π/3时驱动足轨迹示意图Fig.7 Schematic diagram of the locus of driving feet,whenφ=π/3
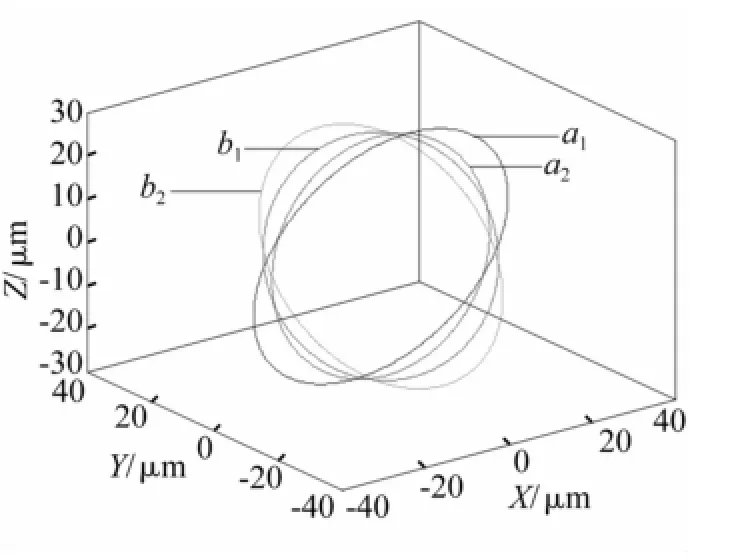
图8 φ=π/2时驱动足轨迹示意图Fig.8 Schematic diagram of the locus of driving feet,whenφ=π/2
由三图看出,电机φ=π/2时运行效率最高,φ此时驱动足接触点a1、a2、b1、b2点运动轨迹曲线在X-Y平面投影见图9。
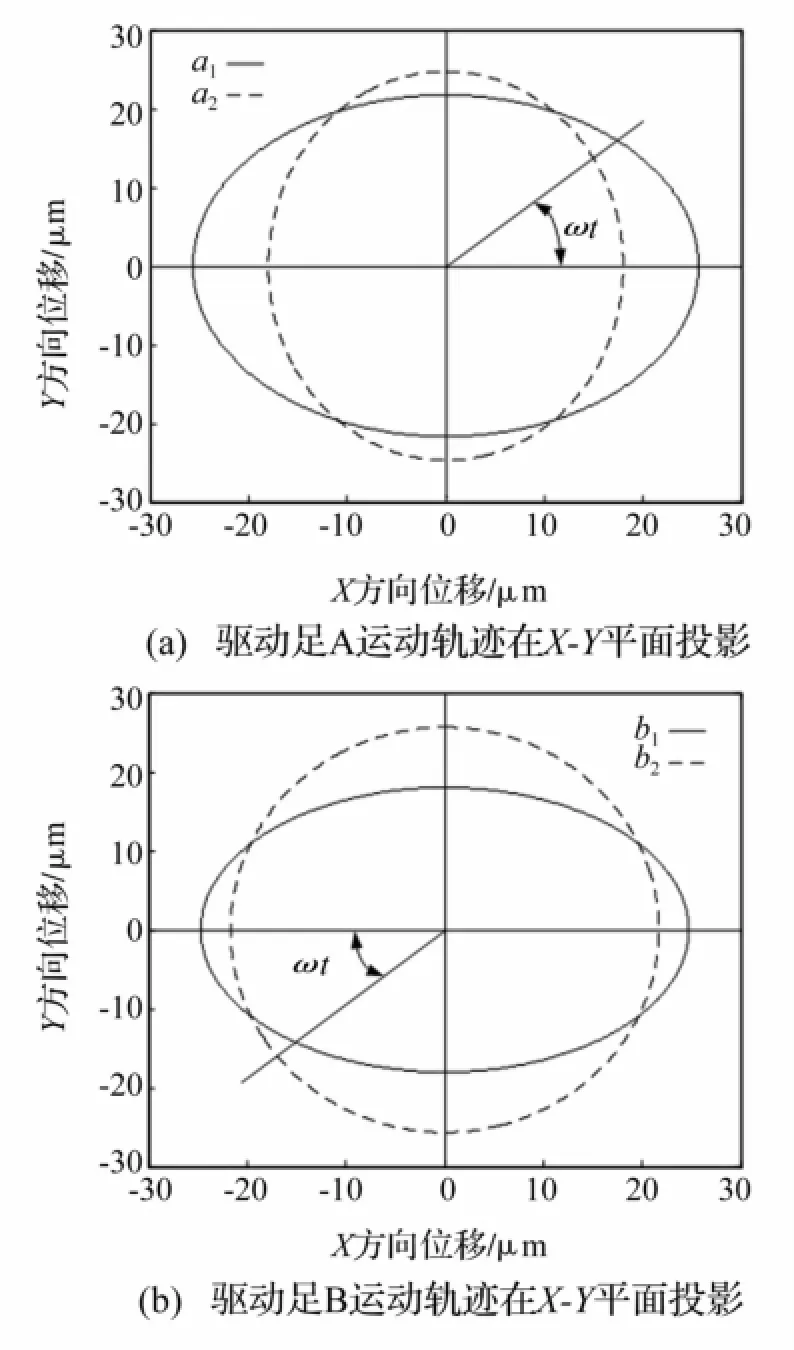
图9 φ=π/2时驱动足轨迹示意图Fig.9 Schematic diagram of the locus of driving feet,whenφ=π/2
驱动足与动子接触,由式(6)、(8)可得与动子作用的接触点在Y-Z平面倾角为

以上分析可证明驱动足接触点椭圆运动轨迹,并能指导电机驱动足设计、优化定子与动子接触、提高电机性能。运动轨迹研究亦能为电机驱动控制提供理论基础。
4 实验研究
据分析制作实验用电机,双足双压电晶片直线超声波电机定子照片见图10。定子在谐振状态下阻抗最小,为使定子驱动足能获得尽量大振幅以提高电机工作效率,电源工作频率应接近谐振频率。本文采用NI公司LabVIEW作为虚拟仪器开发平台,阻抗测试采用LRC测量仪HIOKI3522,PC机与LRC测量仪间通信采用GPIB卡,测量时激励为恒压5 V。测量范围20~40 kHz。所测阻抗-频率特性曲线见图11,谐振频率27.1 kHz。实验结果与谐响应分析结果对比见表1。
图10 双足驱动双压电晶片直线超声波电机定子照片Fig.10 Photo of double-driving feet linear ultrasonic motor stator using bimorphs

图11 定子阻抗-频率特性曲线Fig.11 Impedance-frequence curve of stator

表2 实验结果与谐响应分析结果对比Tab.2 Contrast between experimen tal results and harmonic response analysis results
由表1看出,理论计算与实验结果误差较小。产生误差的主要原因为:①定子加工存在误差;②高电压激励信号下电机的共振模态与低压激励时不同。
5 结 论
(1)本文对用两组正交双压电晶片激励振动双足型直线超声波电机运行机理研究分析,用ANSYS计算获得定子振动模态。
(2)建立电机定子的振动响应有限元模型,分析定子机电特性,利用ANSYS计算定子输入阻抗及谐振点定子驱动足接触点振幅。用几何学原理计算获得接触点振幅,推导不同相位差激励下定子驱动足与动子接触点运动轨迹,为优化电机接触、设计电机驱动控制奠定理论基础。
(3)用基于LabView的阻抗测量方法测量电机定子的输入阻抗,并实验论证理论结果。
[1]Kenjyo T,Sashida T.An introduction of ultrasonic motor[M].Oxford Science Publications,1993.
[2]Oohira F,Iwase M,Matusi T,et al.Self-hold and precisely controllable optical cross-connect switches using ultrasonic micro motors[J].IEEE Journal of Selected Topics in Quantum Electronics,2004,10(3):551-557.
[3]Kawano H,Ando H,Hirahara T,et al.Application of a multi-dof ultrasonic servomotor in an auditory tele-existence robot[J].IEEE Transactions on Robotics,2005,21(5):790-800.
[4]Wai R J,Su K B.Supervisory control for linear piezoelectric ceramic motor drive using genetic algorithm[J].IEEE Transactions on Industrial Electronics,2006,53(2):657-673.
[5]Tominaga M,Kaminaga R,Friend JR,et al.An ultrasonic linearmotor using ridge-mode traveling waves[J].IEEE Transactions on UFFC,2005,52(10):1735-1742.
[6]Sadriyeh SMR,Zolghadri MR,Mahdavi J,et al.Design and simulation of linear piezoelectric stepper motor drive using resonant converter[C].38th IAS Annual Meeting,2003:1711-1717.
[7]Friend J,Umeshima A,Ishii T,et al.A piezoelectric linear actuator formed from a multitude of bimorphs[J].Sensors and Actuators A,2004,109(3):242-251.
[8]曲建俊,齐毓霖,张志谦,等.超声马达摩擦学及其摩擦材料研究进展[J].摩擦学学报,1998,18(1):80-87.
QU Jian-jun,QIYu-lin,ZHANG Zhi-qian,et al.Advances on tribology of ultrasonic motor and its friction materials[J].Tribology,1998,18(1):80-87.
[9]李存岑,杨明,李世阳.超声电机振子振型激励技术研究进展[J].振动与冲击,2009,28(9):175-179.
LICun-cen,YANG Ming,LI Shi-yang.Exciting technique for vibrating shape of ultrasonic motor vibrators[J].Journal of Vibration and Shock,2009,28(9):175-179.
[10]莫岳平,胡敏强,金龙,等.振动模态与超声波电机性能关系的研究[J].电工技术学报,2002,17(3):7-11.
MO Yue-ping,HU Min-qiang,JIN Long,et al.Research on the relation between vibration mode and ultrasonic motor's performance[J].Transactions of China Electrotechnical Society,2002,17(3):7-11.
[11]夏长亮,郑尧,史婷娜,等.行波接触型超声波电机定子振动有限元分析[J].中国电机工程学报,2001,21(2):25-32.
XIA Chang-liang,ZHENG Yao,SHI Ting-na,et al.Fem analysis on stator vibration of traveling wave type contact ultrasonic motor[J].Proceedings of the Csee,2001,21(2):25-32.
[12]张健滔,朱华,赵淳生.行波型杆式超声电机定子的参数化有限元法优化设计[J].振动与冲击,2009,28(7):122-125.
ZHANG Jian-tao,ZHU Hua,ZHAO Chun-sheng.FEM-based parametric optimum design of a traveling-wave type barlike ultrasonic motor stator[J].Journal of Vibration and Shock,2009,28(7):122-125.
[13]Ueha S,Tomikawa Y.Ultrasonic motors-theory and application[M].Oxford Science Publications,1993.
[14]陈永校,郭吉丰.超声波电动机[M].杭州:浙江大学出版社,1994.
[15]徐志科,胡敏强,金龙,等.基于FEA的行波型超声波电机阻抗特性分析[J].中国电机工程学报,2005,25(18):131-134.
XU Zhi-ke,HU Min-qiang,JIN Long,et al.Analysis of traveling wave type ultrasonic motor input impedance characteristic using FEA method[J].Proceedings of the CSEE,2005,25(18):131-134.
[16]陈维山,郝铭,赵学涛,等.纵弯复合多自由度球形超声电机的研究[J].振动与冲击,2009,28(7):105-110.
CHEN Wei-shan,HAO Ming,ZHAO Xue-tao,et al.A muti-dof spherical ultrasonic motor with longitudinal-benging hybrid vibration modal analysis[J].Journal of Vibration and Shock,2009,28(7):105-110.
Operation mechanism of linear ultrasonic motor installed with bimorphs and double-driving feet
CHEN Qiang1,XU Zhi-ke2,JIANG Chun-rong1,LU Dan-hong1
(1.School of Electric Power Engineering,Nanjing Institute of Technology,Nanjing 211167,China;2.School of Electrical Engineering,Southeast University,Nanjing 210096,China)
The operationmechanism of a new type linear ultrasonicmotorwas analyzed.Themotor,installed with bimorphs and double-driving feet,has the attribute of simple structure,no frequency degeneration and easiness to be miniaturized.The construction,vibration mode and operation principle were described.A finite elementmodel of the stator was established to investigate its vibration responses.The computation method of input impedance of the stator togetherwith the computation resultswas presented.The vibration amplitudes at the driving-feet's contact points close to the harmonic frequency were computed.The movement loci of the driving-feet's contact points were derived.The impedance characteristic of stator was surveyed by using impedance characteristic analysis instrument,and the experimental resultswere compared with the theoretical ones.
linear ultrasonic motor;bimorphs;double-driving feet;finite element model;movement locus;impedance characteristic
TM383
:A
10.13465/j.cnki.jvs.2014.22.004
国家自然科学基金资助项目(51207021);江苏省自然科学基金项目(BK20140766);南京工程学院校级科研基金资助项目(YKJ201315,YKJ201317)
2013-03-25 修改稿收到日期:2013-12-29
陈强男,博士,1981年10月生
猜你喜欢
陶瓷学报(2021年3期)2021-07-22
微特电机(2020年7期)2020-07-28
微特电机(2020年3期)2020-03-24
铜仁学院学报(2018年6期)2018-07-05
股市动态分析(2016年24期)2017-01-07
股市动态分析(2016年23期)2016-12-27
股市动态分析(2016年4期)2016-09-29
股市动态分析(2016年25期)2016-07-23
振动、测试与诊断(2014年6期)2014-03-01
振动、测试与诊断(2014年6期)2014-03-01
