
民航发动机状态监测点故障检测方法研究
2014-05-25 00:34陈维兴王雷孙毅刚沈龙云
自动化仪表 2014年9期
陈维兴 王雷 孙毅刚 沈龙云
(中国民航大学航空自动化学院1,天津 300300;中国民航大学基础实验中心2,天津 300300;中国中材装备集团有限公司3,天津 300400)
民航发动机状态监测点故障检测方法研究
陈维兴1王雷2孙毅刚1沈龙云3
(中国民航大学航空自动化学院1,天津 300300;中国民航大学基础实验中心2,天津 300300;中国中材装备集团有限公司3,天津 300400)
民用航空器上发动机的安全性,主要依靠发动机配载的诸多监测点实现发动机状态监测。采用相应的方法对民航发动机状态监测点出现的故障进行诊断。硬故障采用分阶段阈值的方法诊断,依据飞机油门杆角度的不同划分飞行阶段,分别设定各阶段相应的检测阈值;软故障由于其变化的特殊性和缓慢性,选择BP神经网络建立正常发动机监测点模型,通过对比正常运行时的数据图形和实际运行的图形,判断其是否出现故障。经仿真,硬故障诊断的检测阈值能够很好地包含各个阶段监测点的正常运行状态输出, BP网络对于软故障也能够比较清晰准确地反映其实际工作状态。
民航发动机 状态监测 故障诊断 智能控制 WinCE 残差分析 BP网络
0 引言
发动机类似航空器的“心脏”,是整个航空器结构中最重要的部分,其直接决定航空器能否安全运行[1-3]。发动机控制系统建立在其各类工作状态反馈数据的基础上,这些参数均来自发动机配载的状态监测点群,即传感器组的直接反馈。为保证发动机状态监测数据的准确性,首先要确保监测点的正常稳定,这一点可以利用其自身输出数据来验证[1]。由于传感器组的工作环境恶劣、分布广泛且安装部位特殊等原因,使其成为最容易发生故障的发动机组件之一[1-4]。
监测点故障大致分为“软故障(soft fault,SF)”和“硬故障(hard fault,HF)”。“硬故障”是传感器在短时间内突然发生的比较容易识别的损坏和完全失效,这种故障是比较容易识别的。“软故障”是指传感器参数的缓慢漂移,由于这是一种参数的缓慢变化,所以“软故障”的诊断是比较困难的。
传感器故障的研究一般采用卡尔曼滤波,即建立发动机传感器故障检测、隔离与重构[4-9],对传感器的故障进行全面检测,不会特别地区分硬故障和软故障。这些方法只能够检测出传感器故障,而并没有对故障分类。本文针对软故障和硬故障这两种故障类型,分别设计检测方案并进行仿真验证。
1 硬故障检测逻辑和方法
针对发动机监测点的硬故障检测,目的在于确定一个具体的传感器信号的有效性,可以采用带有一定阈值的“Min-Max”检测方法。即依据传感器正常运行时的输出信号,选择最大值Smax和最小值Smin,然后加上或者减去一个相应的阈值σ,作为传感器正常运行时的检测值。当传感器的输出数值超出所规定的阈值时,则说明传感器出现硬故障。过程如下列公式表示。
S表示监测点传感器正常工作时的输出值,则:

σ为传感器正常运行的整个阶段的标准差,即:

式中:Si为传感器在整个发动机运行过程中的输出监测数据;i为传感器数量,且i∈[1,n];为整个过程中传感器输出数据的平均值。
则硬故障检测方法为:

当监测点发生硬故障时,其输出可能会大大超出正常值或者输出的数值为零。因此,设置一个检测的上下限阈值来对其进行检测,完全能够快速准确地检出故障。
民用航空器飞行过程可分为:滑行、起飞、爬升、巡航、下降、进近、着陆等若干阶段。在每个不同的飞行阶段,发动机的各个部分的工作过程存在较大区别,因此同一参数监测点传感器的输出数据也存在着较大差距。飞行阶段划分依据如图1所示,图1(a)反映了发动机油门杆角度在整个飞行阶段的监测数据变化趋势,图1(b)反映了飞行海拔高度的监测数据变化趋势,在不同飞行阶段之间转换时,监测点数值变化较为明显。据此,若检测硬故障时针对某监测点进行整个飞行过程的平均值和标准差计算,则在不同飞行阶段之间会有很大的偏差。

图1 飞行阶段划分依据Fig.1 Dividing basis of the flight phases
综上所述,发动机监测点硬故障检测应先将传感器输出数据按照飞行阶段分类;然后逐类分别计算相应的阈值,并对传感器故障进行检测和诊断。
本文利用某一特征性监测点数据对飞行过程进行分类。由图1(a)可见,随着飞行阶段的变化,各个阶段之间转换需要的动力不同,其油门杆角度监测值的变化非常明显的。这是由于需要调节油门杆以控制发动机的输出动力,因此可以依据油门杆的角度来划分不同飞行阶段。表1列出了某型民航客机在不同飞行阶段对应的油门杆角度。
根据上述分类方法以及传感器硬故障阈值计算方法,可以计算出发动机监测点状态参数在不同飞行阶段的故障检测阈值。不同飞行阶段下发动机低压转子转速(N1)以及燃油流量(fuel flow,FF)监测点的硬故障检测阈值如表2和表3所示。

表1 基于油门杆角度数据对飞行阶段分类Tab.1 Classification of flight phases based on TLA data

表2 N1检测阈值计算与设计表Tab.2 The calculation and design of detection threshold for N1

表3 FF检测阈值计算与设计表Tab.3 The calculation and design of detection threshold for FF
采用归一化计算方法,利用油门杆角度做为特征性监测点数据,对飞行过程进行分段。分段结果表明,在不同飞行阶段下不同监测点数据呈现出“阶跃”式变化,与飞行阶段的划分十分吻合。由此可见,对于不同飞行阶段采用不同的阈值进行故障识别,更能够准确、快速检测发动机监测点的硬故障。
2 软故障检测逻辑和方法
相对硬故障(HF),发动机监测点的软故障(SF)较难检测,原因主要有以下两点。
①由于软故障耦合在监测点数据随时间缓慢变化的过程中,其特征值不如硬故障阈值明显。
②软故障复现性不明显,不会每次都体现在发动机监测点输出数据中,具有“隐晦”特征,无法像硬故障那样明确界定。在发动机实际维修工作中,所谓的“不可重复”故障就可能含有传感器软故障。
如何能够根据传感器输出数据,快速准确地判断传感器是否出现软故障。一些针对于传感器软故障的研究方法,如对多传感器进行的检测、隔离[1],同样没有给出单传感器故障诊断的具体模型,因此,软故障检测成为传感器故障诊断研究的重点和难点[2-3]。BP神经网络是对传感器软故障诊断的有效工具。
影响发动机工作状态的还有发动机工作时的外界环境条件,包括飞行高度、飞行马赫数以及外界大气的压力和温度。这些参数是发动机不可控制的输入,被称为可测的干扰参数。现行的发动机状态关注的是发动机流量(FF)、低压转子转速(N1)、高压转子转速(N2)、发动机排气温度(engine temperature,EGT)、放气活门开度(vent bleed valve,VBV)、压气机可调静叶角度(compressor variable stator vane,CVV)。采用神经网络技术,建立发动机传感器正常运行时的模型。每次飞行结束之后,先将飞行数据输入到建立的模型之中,计算估计传感器的正常运行数值,并与实际的运行数值对比,得出两者之间的残差对比;然后依据所得的残差曲线分析判断传感器是否出现软故障。
经算法验证的可检测的发动机监测点软故障以及作为参数估计样本的发动机监测点如表4所示。

表4 软故障检测网络的I/O节点Tab.4 I/O nodes of the network for soft fault detection
表4主要对N1、N2、FF和EGT这4个监测点进行软故障检测,神经网络输入层节点选用6个发动机监测点输出参数。对于N1、N2和EGT这3个监测点软故障检测网络,选择FF、海拔高度(altitude,ALT)、马赫数(mach number,MACH)、油门杆角度(throttle lever angle,TLA)、CVV和VBV作为输入层节点;对于FF监测点软故障检测网络,用N1替换FF作为输入层节点即可。
考虑发动机维护的实际操作环境,基于Intel PXA255的ARM XScale设计了嵌入式硬件平台,可做手持离线检测或机载在线监测。其主要参数为:RISC架构,2个LAN接口,4个COM端口,4个DIO端口,CPU(PXA255)主频200 MHz,64 MB SDRAM内存和32 MB Cache,1 GB CF卡数据存储,工作环境温度0~70℃,移植WinCE 5.0系统。
由于嵌入式平台的CPU、内存资源受限,神经网络采用BP3层网络结构。为了加快网络的计算速度,输出层只有一个输出单元。中间层节点的选取则要依据相应的选择规则,一般是输入参数的两倍,经过计算和测试,最终确定中间层为11个节点。
软故障处理流程和建立的BP网络模型如图2所示。图2(a)为转故障处理流程,图2(b)所示为N1、N2、EGT的训练模型。对于FF的训练模型,则将N1训练模型中输入节点中的FF与输出N1位置互换即可。

图2 软故障处理流程及BP网络训练模型Fig.2 Flowchart of SF processing and BP network training model
利用Matlab中的神经网络工具箱,根据图2所示的BP网络设计,选择相应的参数和数据进行绘图对比。对于N1和N2进行网络训练的Matlab仿真结果如图3所示。

图3 Matlab仿真结果Fig.3 Simulation results of Matlab
由图3可见,监测点数据的BP神经网络的训练结果(估计值)与实际正常运行数据(采集值)十分吻合、残差微小,两者残差值为正常运行数据值的0.02%~0.5%区间内。分析形成较大残差的原因是飞行阶段的变化引起数据发生较大变化,即飞行阶段临界点的估计误差较大。
由于本文所述SF_BP3算法的最终目的是应用于实际生产,而Matlab所需硬件资源很大且计算耗时较长,达不到实际运行的要求,因此使用C++语言重新开发嵌入式SF_BP3程序。BP网络训练流程图如图4所示。

图4 BP网络训练流程图Fig.4 Flowchart of BP network training
使用C++语言编写时,要对BP网络做一些修改。BP网络的隐藏层和输出层的各个节点均有一个阈值输出,以调整BP网络的输出,使得初始化参量以及调整变量都增加,而且要增加额外的计算量。因此,网络在设计时,在输入层和隐藏层均各增加一个节点作为偏置单元,初始值为1。这个偏置单元与其他节点一样作为下一层的各个节点的一个输入变量进行计算,从而作为下一层节点的阈值。但是两个偏置单元之间不存在联系。
在此验证使用C++编写的SF_BP3程序的准确性。
N1和N2的训练仿真对比结果如图5所示。
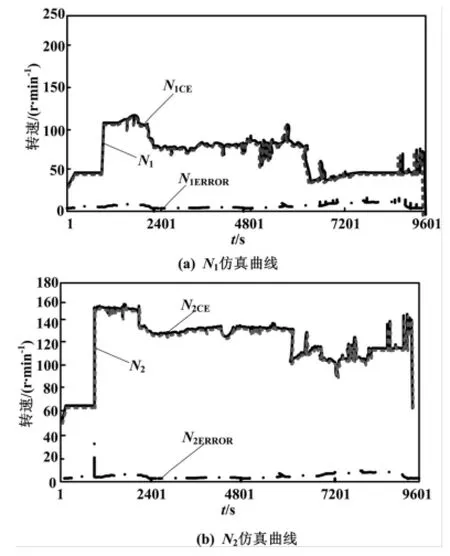
图5 模型仿真结果Fig.5 Simulation results of the model
图5中,曲线N1和N2为监测点实际运行采集数据曲线,曲线N1CE和N2CE为SF_BP3训练结果(估计值)曲线,曲线N1ERROR和N2ERROR为低压转子转速N1和高压转子转速N2的残差值曲线。
由图5分析,训练曲线和实际运行曲线之间的契合度非常高。虽然在某些特殊时刻,如飞行阶段临界点,残差值较大,但BP网络在运行时会记住这种变化,在之后的训练结果之中就基本不会再次出现。因此可验证SF_BP3的仿真效果明显,对于监测点软故障的诊断具有较高的准确性。
经测试,在对一次中等飞行距离记录的发动机监测点数据进行故障监测时,在普通PC机上采用Matlab运算SF_BP3需要2 min左右;而采用C++编写的程序只需要1~2 s;在WinCE环境下需要10 s左右。因此,实时性基本达到实际需要,但若考虑在线监测(需要机载设备)的实时性、安全性,必须要提高硬件平台的层次并进一步优化算法。
3 结束语
针对民航发动机监测点硬故障特点,采用分阶段阈值检测的方法进行诊断,能够快速准确地判断是否出现硬故障。实际测试验证了该方法的正确性。采用SF_BP3神经网络模型对监测点软故障进行诊断,该模型训练收敛速度快、残差小,其训练结果与实际运行采集数据有很高的吻合度,可作为软故障诊断依据。
实际硬件资源低于此配置,故对网络复杂度和性能造成影响,从而进一步对故障监测精度特别是在飞行阶段临界点的故障监测产生了一定影响。虽然BP网络可以一定程度地自我修正,但是也以牺牲计算速度为代价。可见,监测算法应用测试效果与实际运行硬件平台等有着密切的关系。
[1] 薛薇,郭迎清.航空发动机控制系统多传感器软故障检测研究[J].计算机测量与控制,2007,15(4):585-587.
[2] 曹曦.基于神经网络的传感器故障诊断仿真与实验研究[D].上海:上海交通大学,2001.
[3] 张加圣,应英,应勇.航空发动机故障监控系统的设计与软件实现[J].测控技术,2008,27(2):65-68.
[4] 姚华,单贵平,孙健国.基于卡尔曼滤波器及神经网络的发动机故障诊断[J].航空动力学报,2008,23(6):1111-1117.
[5] 刘建,冯雷星.某型航空发动机容错控制仿真研究[J].电子测量技术,2010,33(5):22-25.
[6] 薛薇,郭迎清,李睿.航空发动机状态监视、故障诊断研究及验证[J].推进技术,2011,32(2):271-275.
[7] Talebi H A,Khorasani K,Tafazoli S.A recurrent neural-network-based sensor and actuator fault detection and isolation for nonlinear systems with application to the satellite's attitude control subsystem[C]// IEEE Transactions on Neural Networks,2009.
[8] 徐涛,王祁.一种神经网络预测器在传感器故障诊断中的应用[J].传感技术学报,2005,18(2):235-237.
[9] 孙姜燕,徐艳玲.飞机发动机故障的多参数预测模型[J].计算机工程与应用,2012,48(13):240-243.
Study on the Fault Detection Method for the Condition Monitoring Points of Civil Aviation Engines
The safety and security of the civil aircraft engines mainly rely on equipping numerous monitoring points for monitoring the conditions of the engines.It is necessary to use appropriate method to detect the faults occuring in the monitoring points.The hard faults are diagnosed by using phased threshold method,the flight phases are divided in accordance with the difference of the angle of aircraft throttle level,and corresponding detection threshold is set for each phase.For the soft faults,due to the particularity and slowness of their variation,the model for normal monitoring point is established with BP neural network,through comparing the data graphics in normal running and the graphics of actual running,to determine whether there is a fault.The simulations indicate that the detection thresholds for hard fault diagnosis can includes normal operation output of all monitoring points in each phase;and BP network can also clearly reflect actual working conditions for soft faults.
Civil aircraft engine Condition monitoring Fault detection Intelligent control WinCE Residual analysis BP network
TP391+.5
A
修改稿收到日期:2014-01-13。
陈维兴(1981-),男,2007年毕业于东北大学检测技术与自动化装置专业,获硕士学位,讲师;主要从事自动控制方面的研究。
猜你喜欢
公民与法治(2022年10期)2022-12-29
现代电力(2022年2期)2022-05-23
煤气与热力(2022年4期)2022-05-23
水利水电科技进展(2021年6期)2022-01-07
临床骨科杂志(2020年1期)2020-12-12
水电站设计(2020年4期)2020-07-16
电子制作(2019年19期)2019-11-23
制造技术与机床(2019年9期)2019-09-10
电子制作(2019年24期)2019-02-23
探测与控制学报(2015年4期)2015-12-15
