
车辆换道过程中驾驶人注视转移模式研究
2014-05-14 03:07吴付威牛增良
交通运输系统工程与信息 2014年2期
吴付威,付 锐,牛增良
(长安大学 汽车运输安全保障技术交通行业重点实验室,西安 710064)
1 引 言
在车道变换过程中,如果驾驶人在未能准确地把握周围交通状况的情况下强行换道,很容易与周围的车辆发生刮擦事故.据欧盟统计,在换道引起的交通事故中约有75%的换道事故与驾驶人有关.
2002年,美国Drexel大学的Dario D Salvucci和Andrew Liu选取了11名至少有两年驾驶经验的驾驶人,在模拟的多通道高速公路环境下利用驾驶模拟器进行车道变换试验,综合调查了从左到右和从右到左换道时的方向盘、油门、转向灯和眼睛运动随时间的变化过程,做出了各驾驶控制和视觉行为随时间的变化曲线.研究发现:从左向右变换车道的视觉曲线和从右向左变换车道的视觉曲线互为始末[1].2004年,美国罗格斯大学计算机系的Santella和认知科学中心的DeCarlo提出了一种自动的数据驱动方法,用均值漂移过程将视觉注视点归为注视点或兴趣区域.用这种方法聚出的类能够结构化再现观察者的兴趣所在,并且可复制,不受噪声及奇异点的影响[2].2005年美国“国家公路交通安全局”(NHTSA)的研究人员Louis采用小轿车和多功能能运动型车两种试验车,选取39名驾驶人在高速公路和普通公路上进行了23949英里(约38558 km)的试验,采集了8667个换道行为,重点研究了换道前10 s的时段.分析了从左到右和从右到左的车道变换特性,并得出了换道期间的眼睛注视分布特性[3].2006年,G Pastor和PTejero等人选取了男女各12名熟练驾驶人在高速公路上和平常道路上进行实车试验,并用摄像机记录驾驶人的眼睛运动.通过观看、分析试验录像得到了驾驶人在不同道路上观看后视镜的频率和时间的关系,并进行了差异分析.结果表明,驾驶人在不同道路上观看后视镜的视觉行为存在显著性差异,并对差异进行了分析[4].2009年,Shan Bao和Linda Ng Boyle选取了年轻、中年和老年驾驶人各20名在两个交通事故发生频率不同的十字路口进行了左转、右转和直行的实车试验.分析了不同年龄驾驶人在不同条件下观看后视镜等区域的视觉搜索模式[5].2011年,美国MIT大学AgeLab的Lavallière等人选取了108名驾驶人在高速公路上进行实车试验,研究了车道变换过程中年龄及性别对驾驶人视觉搜索行为的影响[6].
本文主要针对高速公路车辆换道过程中驾驶人的注视转移模式进行研究.
2 试验数据采集
2.1 试验道路
本研究选取浙江省湖州市的某高速公路路段作为试验路段,所选段路长度为12.6 km,双向四车道,以中央隔离带分隔;行车道限速为60~100 km/h,超车道限速为100~120 km/h.试验过程中路段的交通流量为1200~2000车/小时.
2.2 被试者选取
试验以自愿形式招募了13名驾驶经验丰富的男性驾驶人,平均年龄为42岁(SD=4.4),平均驾龄为19年(SD=4.6),被试人员基本信息如表1所示.

表1 试验驾驶人基本信息表Table 1 The basic information of test participants
2.3 试验车辆及设备
本试验所采用的眼球追踪设备为澳大利亚SeeingMachines公司生产的一款非接触式眼动仪faceLAB 5[7],用于跟踪驾驶人眼睛注视行为和头部运动,测量注视点位置、注视时间、扫视行为、头部位置、头部旋转角度等参数,其采样频率为30 Hz.试验车辆为大众途安自动挡7座车.此外,还包括电源等其他相关的试验装置.
3 注视特性分析
3.1 注视区域划分
视觉是驾驶人获取交通信息的主要渠道.在驾驶过程中,驾驶人需要获取足够的交通信息才能为驾驶操作做出正确的决策,从而保证行车安全.为了研究换道过程中驾驶人对不同交通信息的关注程度及注意力分配情况,将驾驶人视野划分为6个区域.区域划分情况如图1所示,各注视区域所包含的交通信息如表2所示.
将驾驶人视野进行区域划分之后,可以分析注视点在不同区域的分布情况.选择有效的试验数据,观看场景摄像头拍摄的带有注视点的试验录像,逐帧分析每幅画面中注视点所在的区域,确定每个注视点相对应的注视目标.该方法的优点是统计简单方便、精确度高.
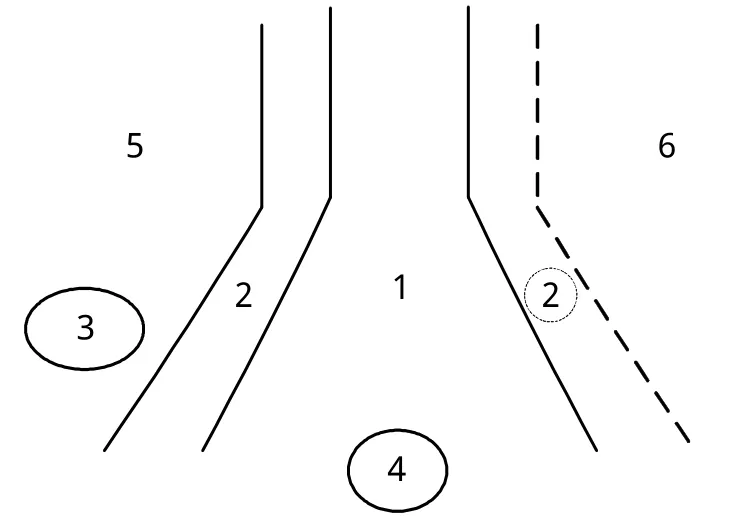
图1 换道过程注视区域划分Fig.1 Fixation areas determination
3.2 换道意图阶段视线转动情况
注视点分布情况可用视线转动角度描述.本文以向左换道为例开展研究.根据场景录像分析发现,驾驶人在采取换道行为之前5 s内的意图较为明显,一般为观察左后视镜,所以取换道意图阶段的时窗宽度为5 s;而换道执行阶段,即从开始换道至换道结束的持续时间从4 s到9 s不等,平均为5.82 s.注视在各区域的分布情况及视线转动情况如图2所示.
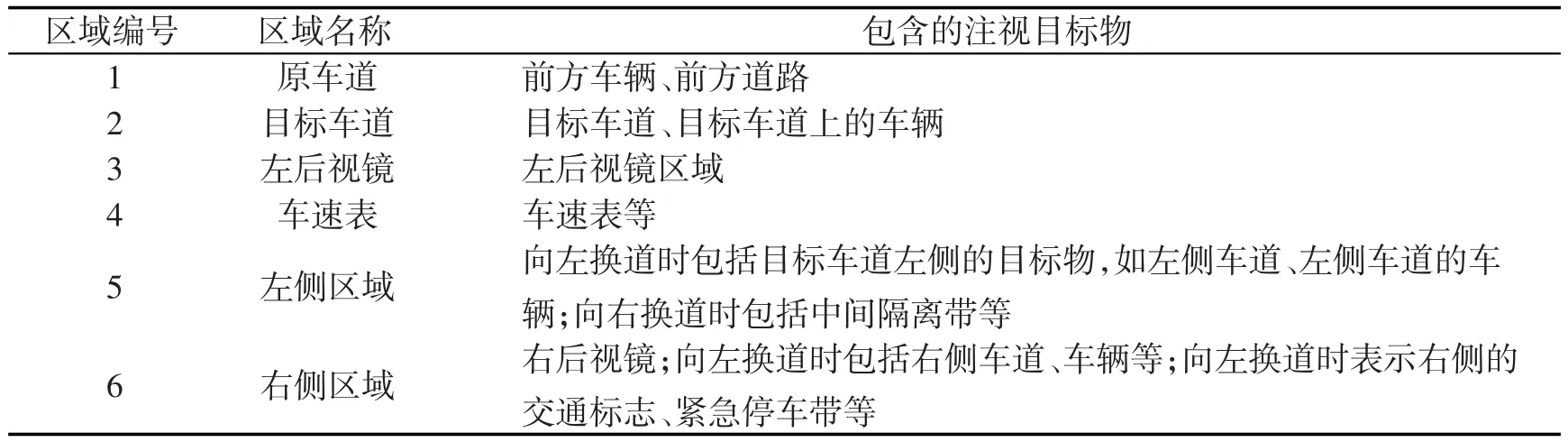
表2 注视区域目标分类Table 2 Fixation objects classification
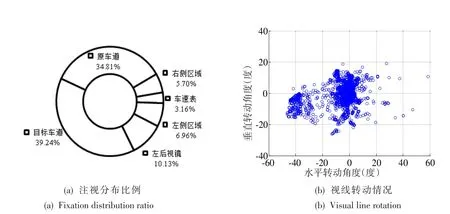
图2 换道意图阶段注视情况Fig.2 Visual line rotation during lane change intent stage
由图2(a)可知,在换道意图阶段驾驶人对原车道和目标车道的注视所占的比例很高,二者之和占到了总数的70%以上,说明驾驶人的主要注意力分配在这两个区域.
由图2(b)可知,驾驶人的视角主要分布在垂直[-15°,15°]和水平[-50°,30°]范围内,即主视区和左侧视区.表明在换道意图阶段,驾驶人将主要注意力集中在前方视野,为了判断是否具有安全的换道条件,对目标车道的观察较多,并通过左后视镜观察目标车道后方的路况信息.因此视线在左侧区域分布较多,而在右侧区域的分布较少.垂直方向上,在主视区的垂直视角主要分布在[-10°,15°]范围内.视线在[-20°,-10°]附近区域较为集中,表明驾驶人在关注车速表等车内设施、前方车道近处.在左侧视区,视线主要分布在[-15°,0°]之间,表示驾驶人观察左后视镜及左侧的中间隔离带等目标物.
3.3 换道执行阶段视线转动情况
由图3(a)可知,换道执行阶段驾驶人对原车道的注视大幅降低,对目标车道的注视程度也略微减少,而对左侧区域的注视大大增加.驾驶人主要将注意力集中到目标车道,以便控制车辆的行驶轨迹及车辆的横向位置,并观察目标车道前方可能存在的其他车辆,从而顺利地实施换道.
由图3(b)可知,视线的视角主要分布在垂直[-15°,15°]和水平[-45°,35°]两个范围内,表明驾驶人主要关注正前方的主视区及左侧车道.但是,与意图阶段相比,视线的集中程度较低,说明驾驶人注视目标物的分布范围较广.左侧视区的视线表示驾驶人观察左后视镜及左侧区域,但是视线分布与意图阶段相比较为分散.

图3 换道执行阶段注视情况Fig.3 Visual line rotation during lane change stage
垂直方向上,在主视区驾驶人的垂直视角主要分布在[-10°,10°]范围内,与换道意图相比视线的范围较小,表明驾驶人主要关注前方近处的目标物.在[-20°,-10°]范围视线分布比意图阶段较少,说明在执行阶段驾驶人亟需关注前方及左侧区域,从而对车速表等车内设施的关注减少.在左侧区域的视线主要分布在[-15°,15°]范围内,但是与意图阶段相比视线集中程度较低.
4 视线转移模式
马尔可夫理论认为,在已知时刻t0系统所处状态的条件下,时刻t0以后系统到达的状态与时刻t0以前系统所处的状态无关,完全取决于时刻t0系统所处的状态.这个特性称为无后效性,也称为“马尔可夫性”[8].注视点在注视区域之间的转移是一个典型的齐次马尔可夫链[9].本文运用马尔可夫链理论,研究驾驶人注视点在各注视区域间转移的一步转移概率和平稳分布,分析换道过程中驾驶人注视转移的基本规律.
4.1 换道意图阶段注视转移模式
根据注视在时间序列上的变化情况,得到两次连续注视之间的转移规律,得出换道意图阶段注视在不同区域之间的一步转移概率矩阵,如表3所示.
总体来看,注视从原车道向目标车道的转移概率最高(0.792),说明在换道意图阶段驾驶人在注视原车道之后,下一次最有可能注视的区域是目标车道.同时,注视从目标车道向原车道的转移概率为0.607,略低于注视从原车道向目标车道的转移概率,这是由于在注视目标车道后,驾驶人将其视线转移到了左后视镜(0.179)、左侧区域(0.125)等区域.当前注视区域为左后视镜时,注视向目标车道的转移概率最高(0.667),其次为原车道(0.200).
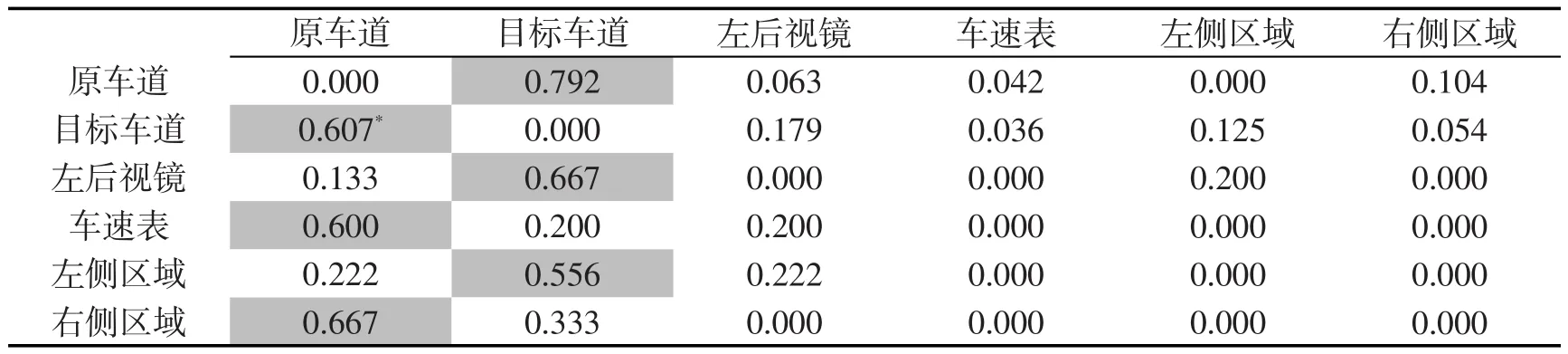
表3 换道意图阶段注视一步转移概率*Table 3 Fixation’s one-step transition probabilities during lane change intent stage
4.2 换道执行阶段注视转移模式
在换道执行阶段,驾驶人对目标车道和左侧区域的注视程度有所增加,而对原车道的注视相应减少.在该阶段驾驶人对左侧目标物的注视增多.换道执行阶段注视在不同区域之间的一步转移概率如表4所示.
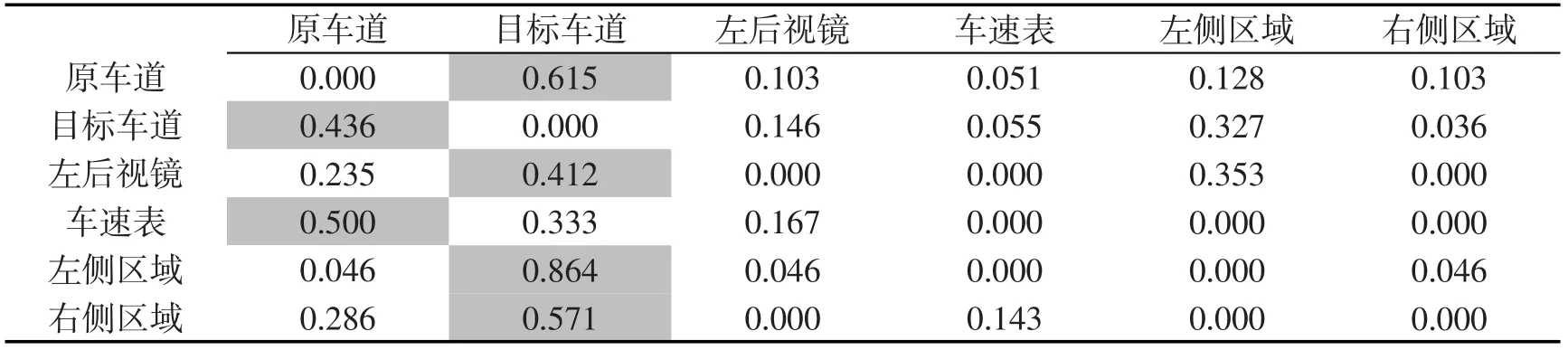
表4 换道执行阶段注视一步转移概率Table 4 Fixation’s one-step transition probabilities during lane change stage
当前车道为原车道时,注视到目标车道的一步转移概率最高(0.615),说明驾驶人在观察原车道之后,将大部分的注意力转移到了目标车道.同时,注视从目标车道向原车道的转移概率为0.436,低于原车道向目标车道的转移概率,这是由于在注视目标车道后,驾驶人将其视线转移到了左后视镜(0.146)、左侧区域(0.327)等.
当前注视区域为左侧区域时,注视到目标车道的转移概率最高(0.864),说明驾驶人在观察左侧区域的目标物之后将视线转移到目标车道.当前注视区域为右侧区域时,注视向目标车道的转移概率最高(0.571),其次为原车道(0.286).
4.3 注视平稳分布
将换道意图阶段和执行阶段的一步转移概率作为系统初始概率,分别得出两个阶段驾驶人的注视平稳分布如下:
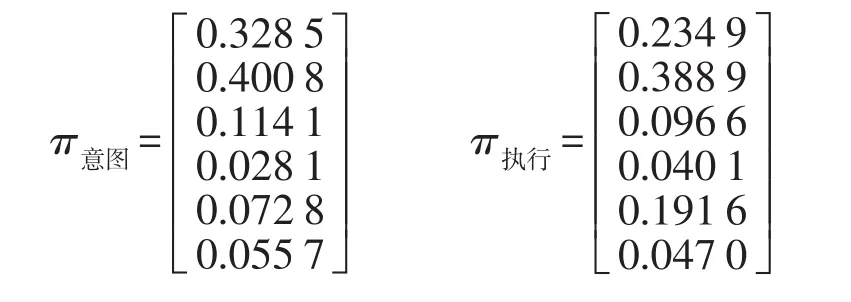
总体来看,换道过程中驾驶人的主要注视区域为原车道和前方车辆,而且对目标车道的注视多于对原车道的注视,其次对左后视镜的注视也较多.
在换道意图阶段,驾驶人的注视以较大的概率出现在原车道和目标车道,并且二者的概率和超过了0.7,并且对目标车道的注视概率最高.在意图阶段驾驶人需要判断周围的交通环境是否满足换道条件,因此会将大部分注意力分配到目标车道上.此外,驾驶人也需要通过观察左后视镜以获取左侧车道后方的交通信息,因此对左后视镜的注视概率也较高,比换道过程对左后视镜的注视概率要大得多.由于驾驶人的主要注意力分配到了主视区及左侧区域,所以对右侧区域的注视程度相应减少.
在换道执行阶段,驾驶人对原车道的注视稳态概率与意图阶段相比大幅度减小,对目标车道的注视也有所降低,但是这两个注视区域仍然是驾驶人关注的重点.此外,与意图阶段相比,驾驶人对左侧区域的注视稳态概率接近0.2,说明在实施换道过程中驾驶人的首要任务是控制车辆的横向位置和速度,所以驾驶人需要通过观察左侧的车道线和中间隔离带等目标物以保持车辆在车道中的位置,并且通过观察车速表以获取车速信息.
5 研究结论
本文主要研究了换道过程中驾驶人注视随时间的变化规律,针对换道的不同过程,研究了注视在不同注视区域间的一步转移规律,以及注视平稳分布特性,结论如下:
(1)换道意图阶段的时间一般为5 s.
(2)换道意图阶段驾驶人的视线主要集中在原车道和目标车道,视线在两者之间来回转移.在换道执行阶段,驾驶人对原车道的注视大幅度降低,对目标车道和左侧区域的注视程度相应增加.
(3)视线的分布情况可判断驾驶人是否有明显的换道意图.因此,单位时间内视线在水平方向上转动某一特定角度所占的比例可作为判断驾驶人换道意图的依据之一.
[1]Salvucci D D,Liu A.The time course of a lane change:Driver control and eye-movement behavior[J].Transpor⁃tation Research Part F:Traffic Psychology and Behav⁃iour.2002(5):123-132.
[2]Santella A,Decarlo D.Robust clustering of eye move⁃ment recordings for quantification of visual interest[C].San Antonio,Texas:2004.
[3]Tijerina L,Garrott W R,Stoltzfus D,et al.Eye glance be⁃havior of van and passenger car drivers during lane change decision phase[J].Transportation Research Re⁃cord:Journal of the Transportation Research Board.2005(Volume 1937/2005):37-43.
[4]Pastor G,Tejero P,Chóliz M,et al.Rear-view mirror use,driver alertness and road type an empirical study using EEG measures[J].Transportation Research Part F:Traffic Psychology and Behaviour.2006,9(4):286-297.
[5]Bao S,Boyle L N.Age-related differences in visual scan⁃ning at median-divided highway intersections in rural areas[J].Accident Analysis and Prevention.2009(41):146-152.
[6]Lavallière M,Reimer B,Mehler B,et al.The effect of age and gender on visual search during lane changing[C].Lake Tahoe,California:2011.
[7]Seeingmachines.faceLAB 5[OL],(2012-4-11)[2013-8-21].http://www.seeingmachines.com
[8]刘次华.随机过程(第二版)[M].武汉:华中科技大学出版社,2001.[LIU C H.Stochastic process(the second edition)[M].Wuhan:Huazhong University of Science and Technology Press,2001.]
[9]袁伟.城市道路环境中汽车驾驶员动态视觉特性试验研究[D].西安:长安大学,2008.[YUAN W.Study on car driver’s dynamic visual characters test on city road[D].Chang'an University,2008.]
猜你喜欢
智能建筑与智慧城市(2022年9期)2022-09-28
特区文学·诗(2021年6期)2021-12-22
兰州理工大学学报(2021年5期)2021-11-02
金色少年(奇趣科普)(2017年11期)2017-11-28
体育时空(2017年6期)2017-07-14
中国新闻周刊(2017年21期)2017-06-15
复旦学报(自然科学版)(2016年4期)2016-09-21
汽车零部件(2015年8期)2015-06-23
当代贵州(2015年19期)2015-06-13
汽车科技(2015年1期)2015-02-28
