正着走与退着走生物力学机制研究
2014-05-14 02:40:14张庭然宋吉祥吴召群
天津体育学院学报 2014年1期
张庭然,罗 炯,王 翔,赖 彬,宋吉祥,吴召群
正着走与退着走生物力学机制研究
张庭然,罗 炯,王 翔,赖 彬,宋吉祥,吴召群
目的:揭示退着走的相关生物力学机制,为推广退着走健身模式提供重要的生物力学依据。方法:通过运动学、动力学、肌电等手段同步测试相关生物力学参数,并运用逆动力学计算获得步行中髋、膝、踝关节力矩和关节功。结果:与正着走相比,退着走受试者受走向的影响较大,因此退着走在步速、步频、跨步长等方面显著变短,单步时间、双支撑时间、第1双支撑时间则显著变长,而2种走模式下的相关关节角位移表现惊人的相似性;正着走时,踝关节力矩模式与时相反转后退着走亦表现惊人的相似,而膝、髋2关节却没有如此雷同;2种走模式下的踝、膝、髋关节功率差异明显,并推断退着走的主要推动力及震荡吸收来自踝关节,膝、髋2关节几乎不能产生推动功率;正着走时,受监测的大腿肌肉中,除股直肌肌电活动低于退着走外,股二头肌、股内肌及股外肌活动显著高于退着走;4块小腿肌中,退着走时,腓肠肌内侧、腓肠肌外侧、胫骨前肌及比目鱼肌的肌电活动均显著高于正着走,进一步左证退着走的动力源来自踝关节,而正着走,其动力源主要由髋与膝关节承担。结论:退着走练习可修改神经机制而有助于运动学习,这对受损的肌肉骨骼功能再教育是有益的;退着走髌骨-股骨关节承受来自地面的反应力要低,因此,退着走对下肢过度使用受伤的病人康复是有益的。
正着走;退着走;生物力学
退着走(Backward Walking,简称BW)又称背向行走,它是一种建立在正着走(Forward Walking,简称FW)基础上的人类的一种本能。退着走最早应用于脑出血后遗症患者不对称步态的康复矫正训练,并取得了较好的效果。近些年,日本学者将其作为一种健身方式引入健康的中老年人群中,因其健身效果显著而受到追捧。如今,退着走这种健身方式已引起国外学者的广泛关注,并报道了一些相关成果,退着走有助于增强人体平衡、增强心血管系统功能、使健身者拥有更加强壮的肌肉骨骼系统[1-4]。YANG等[5]研究表明,脑卒中后患者不对称的步态模式能够通过退着走疗法得到改善;HACKNEY等[6]研究证实,退着走对改善帕金森氏症患者的功能灵活性、步态表现、平衡能力效果显著;有学者[7]从动作控制观点出发,将退着走作为正着走的逆运动,发现2种走模式下,髋、踝关节角运动规律非常相似但时相反转;THORSTENSSON[8]研究认为,退着走与正着走肌肉活动模式(EMG)相关性较差;GRASSO等[7]通过肌电发现2种走方式的差别是推进源不同,正着走的推动力是靠踝关节跖屈肌产生,而退着走的推动力主要靠髋关节和膝关节伸肌提供。国内仅查到1篇关于退着走的研究报道,即赵焕彬[9]对老人退着走的足底压力进行的测定,认为,退着走较正着走可以使足底各部位压力分布均匀,并能锻炼平衡控制能力及肌肉调节能力。
综合国内外学者的相关研究,目前还无人能对有关2种走模式的生物力学机制进行全面分析,一些研究偏向于运动学模式比较,一些研究注重动力学、足底压力的探索,更多的生理学领域专家将注意力集中于下肢肌群的肌电特征,并结合神经控制论相关理论进行探讨,极少有学者将3种研究方法结合起来进行综合分析。本研究将运动学、动力学、肌电三者同步对2种走模式进行综合比较,目的是揭示退着走的相关生物力学机制,并揭示其动力源,为今后在我国推广这种健身模式提供重要的生物力学依据。
1 研究对象与方法
1.1 研究对象
来自西南大学16名男生自愿参与本次试验,受试者年龄(22.34±1.46)岁,身高(174.42±5.36)cm,体重(68.21±4.95)kg。试验前,所有受试者均无退着走的行走习惯,亦未接受有关退着走任何形式的训练。
1.2 研究方法
运用运动学、动力学、肌电同步测试方法(见图1)。(1)运动学参数测试。采用1台JVC9 800高速摄像机,拍摄频率为100帧/s,摄像机固定正对三维测力台,距离测力台约5 m,机高0.75 m。用于拍摄受试者从踏上测力台至蹬离测力台的整个过程。采用北京体育大学研发的视讯图像解析系统对运动图像进行解析以获取相关运动学参数。
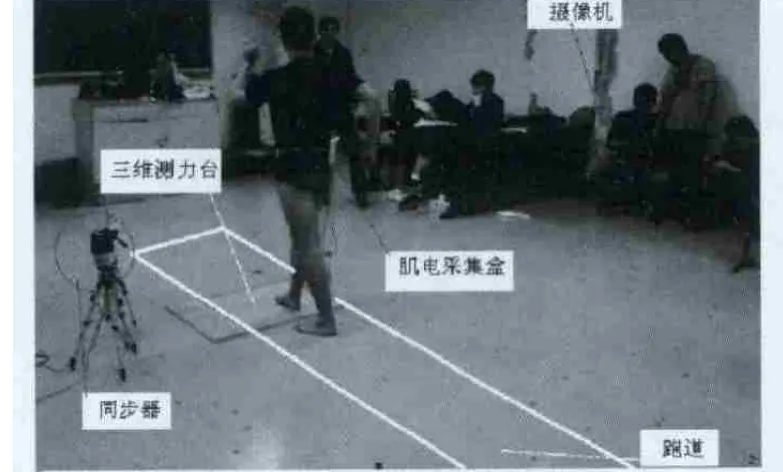
图1 正着走与退着走实验测现场图Figure1 The experimental field about forward and backward walking
(2)动力学参数测试。国产JP6 060多维测力平台用于监测受试者踏上测力台过程中脚对地面的三维力变化情况。测力台采用埋入式安装,其表面与跑道基本保持在同一水平面上,数据采样频率为800 Hz。
(3)肌电(EMG)参数测试。国产JE-TB0 810八通道无线表面肌电仪系于受试者腰带上,用于监测正着走与退着走过程中下肢主要肌群的肌电变化。受试者统一测右腿,监测股直肌、股二头肌、股内肌、股外肌、胫骨前肌、内侧腓肠肌、外侧腓肠肌和比目鱼肌8块肌肉。
(4)无线同步起动装置。同步装置是由连接多维测力平台的触发模块的无线同步器和无线连接表面肌电仪的无线同步器以及发光的二极管组成。主试者触发同步遥控器,多维测力台和表面肌电仪同时启动采集数据,二极管发光使摄像机与多维测力台和表面肌电仪同步。
1.3 试验程序
试验前,每位受试者在装有测力台的实验室跑道上进行正着走与退着走试走,目的是为了更好地适应试验环境、熟悉试验流程、体验2种走模式。正式试验时,每名受试者在跑道(10 m长)上赤脚完成正着走10次,退着走20次,每走5次受试者休息2 min。休息期间,试验操作人员把表面肌电仪器存贮数据导出。试验过程中,要求受试者“无视”测力台存在,并以自己平时最舒服的走法完成试验。
1.4 时相阶段划分与髋、膝、踝定义
本文将受试者踏上多维测力台之前的右脚蹬离跑道瞬刻视为起始点,进入摆动阶段,然后右脚踏上测力台,直至其蹬离测力台瞬刻为结束点,视之为一个完整的单步过程。整个单步过程右腿的活动分为摆动期和支撑期,支撑期内有第1双支撑期、单支撑期、第2双支撑期。双支撑期是指左右双脚未完全离开地面的时段,单支撑期是指只有右腿单独与地面接触的时段。摆动期是指左腿为支撑腿,右腿为摆动腿且右腿完全离开地面。第1双支撑期是指右腿由摆动腿过渡为支撑腿、左腿由支撑腿过度向摆动腿,且左右脚均未完全离开地面的时段;单支撑期是指右腿为支撑腿,左腿为摆动腿,且左脚完全离开地面的时段;第2双支撑期是指右腿由支撑腿过渡摆动腿,左腿由摆动腿过渡为支撑腿且左右脚均未完全离开地面的时段(见图2)。

图2 完整单步相对阶段划分图Figure2 The time and phase division for a completed single step
髋、膝、踝角计算如下:髋角定义为髋、膝关节中心连线与人体垂直轴之间的夹角;膝角定义为膝、踝关节中心连线与人体垂直轴之间的夹角;踝角定义为踝关节中心与跖趾关节连线与水平轴之间的夹角。
1.5 数据获取
1.5.1 有效试验选择 运用运动图像解析软件对所有受试者完成的图像进行采集,通过慢放进行选择。有效行走标准为:(1)右脚完全踏在多维测力平台上;(2)正着走时遵循脚跟着地而脚趾离地者;(3)退着走符合脚趾着地而脚跟离地者。有1人的试验数完全不符合有效数据纳入标准而被剔除,余下15名受试者中,每人选正着走与退着走各2次有效数据进行分析。
1.5.2 采样数据的标准化处理 因本次同步试验测试过程中,运动学采样100帧/s、测力台采样频率为800帧/s、肌电采样为1 000帧/s,而每位受试者正着走与退着走的速度不同,故单步时间亦不同。为了探讨正着走与退着走的本质规律,必须对3类参数进行标准化处理。采用传统标准化处理方法[10-12],选择受试者有效踏上测力台的一个单步为标准,将该单步按0~100%进行标准化,从而实现对每个受试者不同走模式下一个完整单步参数,随后对标准化数据进行叠加、求和及配对检验。
1.5.3 肌电数据的处理 原始肌电信号经全波整流后,用低通滤波器进行平滑处理,从而获得2种走模式下,每位受试者8块肌肉肌电平滑后的原始数据值,分别对15位受试者的有效肌电值按不同肌肉在不同走模式下进行叠加,再对叠加后数据进行第2次平滑,以获取每块肌肉的肌电图线性包络图。
采用传统方法[12]确定肌电爆发和结束的时相以及各肌肉放电相对百分比,以便获得更多的有关肌肉活动的信息。以股直肌为例,先测得受试者股直肌的最大等长收缩时的肌电值,经平滑后以其最大值的20%定为股直肌肌肉爆发肌电时的阈值(即基线),据此标准确定随后的正着走、退着走过程中,获得股直肌肌电爆发时刻、放电持续时间及肌电结束时间。
1.5.4 统计学分析 本文利用spss13.0进行描述性分析、配对T检验、相关分析等,统计学显著水平定为P=0.05。
2 结 果
2.1 重复测量结果
将入选的15名受试者正着走和退着走的各2次数据进行重复性检验,采用相关系数及变异度进行评价,其相关系数均大于0.78,变异系数在5%以内,且均达到显著水平,可以认为,下文用于分析的正着走与退着走各项参数均具有较好的可信度。
2.2 运动学测试结果
2.2.1 步幅特征 与正着走相比,退着走的单支撑时间及摆动时长没有显著差异(Pgt;0.05);退着走的步速(Plt;0.05)、步频(Plt;0.05)呈显著下降,跨步长变短,单步时间(Plt;0.05)、双支撑时间(Plt;0.05)、第1双支撑时间(Plt;0.05)显著延长(见表1)。
2.2.2 角度变化特征 与正着走相比,退着走摆前踝关节最大跖曲角无差异(Pgt;0.05),而支撑中踝最大背屈角明显增加(Plt;0.05),摆动中最大跖曲角显著变小(Plt;0.05),整个单步过程中,踝关节的运动范围显著变小(Plt;0.05)。与正着走相比,退着走摆前最大屈膝角、摆动中最大屈膝角及整个单步膝角变化范围都显著变小(Plt;0.05);退着走脚跟蹬离时屈髋角无明显差异(Pgt;0.05),但支撑期最大伸髋明显小(Plt;0.05),整个单步期,髋的变化范围明显小(见表1)。
2.2.3 时空特征 由于正着走模式是脚跟着地脚趾离地,而退着走是脚趾着地脚跟离地,若将退着走按时间反转后观察,那么2种走的着地模式就完全相同了。为了进一步看清2种模式的差异,本研究特将退着走时踝、膝、髋角位移及3关节力矩参数进行时相反转,再与正着走在同一坐标系中作图进行比较,而关节功率、三维力及肌电参数等图像制作没有进行时相反转。
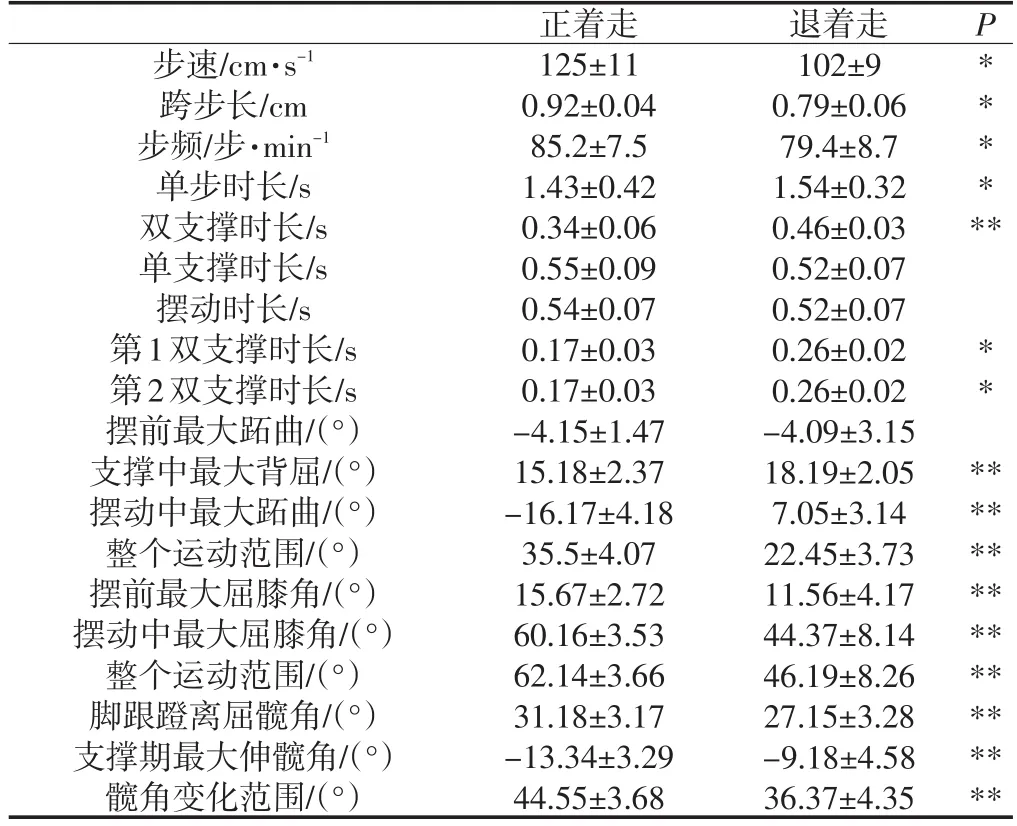
表1 正向走与退着走时空特征参数统计表(M±SD)Table1 The statistical table of spatial and temporal parameters about forward and backward running(M±SD)
(1)从单步整体看,时间反转后的退着走与正着走相比,踝、膝、髋3关节角位移随时间变化特征非常相似,只是单步周期内少数关键点存有显著不同(见图3至图5)。
(2)踝关节的角位移变化特征:正着走摆动前期与退着蹬离后期踝背伸几乎无差异;在正着走与退着走重叠的支撑区,正着走有最大跖曲,而退着走有最大背伸;正着走蹬伸期与退着走前摆期间踝关节最大跖曲没有明显差异;正着走踝关节活动范围明显大于退着走;退着走踝关节除了在着地处有短暂背伸外,整个支撑阶段大部分时段处于跖屈状况(见图3)。
(3)膝角变化特征:正着走摆动期与退着走的蹬伸期,膝角变化状态相同,但正着走的最大伸膝显著高于退着走;正着走与退着走重叠的支撑区域,正着走着地时膝的屈曲状况明显大于退着走着地时屈膝状况,整个公共区域正着走拥有比退着走更大的屈膝状况;正着走蹬伸阶段的最大屈膝显著大于退着走前摆动阶段屈膝状况;正着走膝关节动作范围明显大于退着走膝关节范围(见图4)。
(4)髋角变化特征:正着走摆动期与退着走蹬伸期髋角变化趋势一致,但正着走伸髋更为明显;2种公共的重叠区表明,正着走腿着地时比退着走有更大的屈髋状况;正着走蹬伸后期伸髋效果明显不如退着走的摆动前期;正着走髋的活动范围显著高于退着走;退着走髋整个支撑阶段大部分时期处于屈曲状况,而在整个摆动期,髋处于伸展状况(见图5)。
2.3 动力学测试结果
3号受试者宋同学(运动训练专业)正着走与退着走地面对人体三维反作用力随时间变化规律见图6、图7,具有如下特点。
(1)2种走模式的垂直力曲线存有明显差异,集中体现在着地缓冲(加载反应)及支撑蹬伸阶段。正着走与退着走都展示出马鞍线,然而正着走的2个峰值差异不是很大,而退着走2个峰值存有显著差异。进一步比较发现,正着走的第1个峰值比退着走的第1峰值要显著偏低,而正着走的第2峰值比退着走要显著偏高。
(2)X轴方向代表前后受力,正着走着地缓冲阶段产生阻力显著小于同阶段的退着走;正着走着地蹬伸阶段产生的动力显著高于同阶段的退着走;正着走着地支撑蹬伸阶段产生的动力明显高于其缓冲阶段产生的阻力。因此,正着走单步加速作用明显,而退着走着地支撑缓冲阶段产生的阻力明显大于其蹬伸阶段产生的动力,故其减速作用明显。
(3)从Y轴方向可以看出2种走模式着地支撑过程人体的稳定性,正着走人体处于单支撑过程中左右晃动较小,而退着走晃动明显偏大,这充分说明正着走单步过程比退着走稳定。
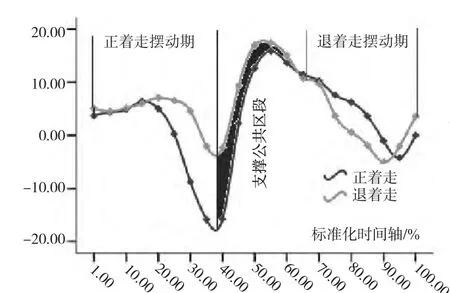
图3 踝关节角随时间变化曲线Figure3 The changing curves along with time of ankle joint angle
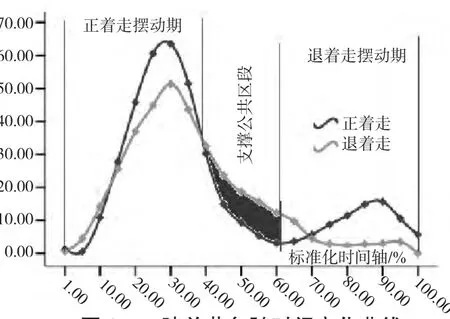
图4 膝关节角随时间变化曲线Figure4 The changing curves along with time of knee joint angle
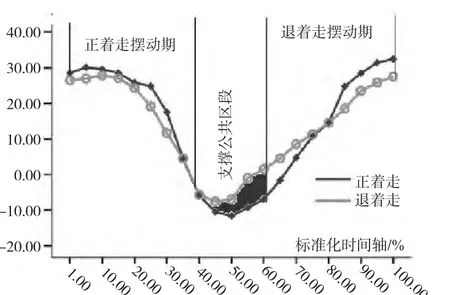
图5 髋关节角随时间变化曲线Figure5 The changing curves along with time of hip joint angle
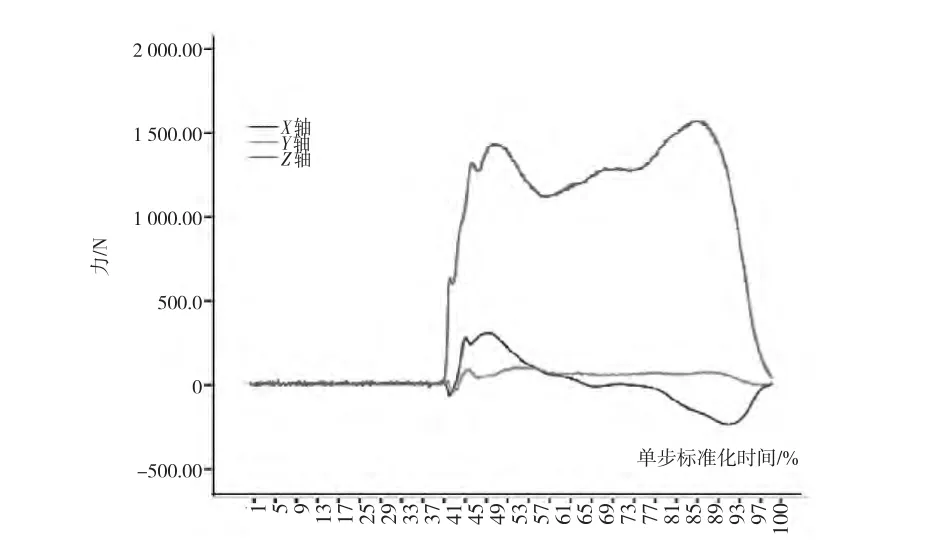
图6 正着走三维图随时间变化曲线Figure6 The three dimensional force characteristics along with time of forward running

图7 退着走三维图随时间变化曲线Figure7 The three dimensional force characteristics along with time of backward running
2.4 肌电测试结果
2.4.1 股直肌肌电特征 股直肌(RF)的主要功能是屈髋-伸膝。(1)2种走模式下,股直肌肌电存有较大差异,退着走时,股直肌几乎在整个支撑阶段处于激活状况,而正着走只在第2双支撑段处于激活状况;(2)退着走的摆动前期,肌电活动由强变弱,随即停止活动,直到摆动期结束,而正着走在摆动前期与退着走相似,随即停止活动约10%个步态后,又迅速爆发肌电,并在摆动结束时达到较高激活状况;(3)就2种模式下所测的4块大腿肌(股直肌、股二头肌、股外肌、股内肌)而言,股直肌是唯一1块退着走模式下激活放电量高于正着走的肌肉,特别在单支撑期、第2双支撑期,无论是平均肌电、最大肌电,退着走都高于正着走(除第1双支撑差异不明显外);(4)从肌肉激活的时值看,退着走肌肉激活时值明显长于正着走(74.5%±3.6%对61.8%±2.8%,Plt;0.05)(见图8a、表2)。
2.4.2 股二头肌肌电特征 股二头肌(HAM)的主要作用是屈膝和伸髋。(1)退着走的摆动前期,股二头肌就被激活,而在摆动腿着地前约6%个步态时几乎停止肌电活动,正着走在摆动前约12%个步态周期内并没激活,随即迅速爆发肌电直到摆动腿着地;(2)退着走在整个支撑阶段,股二头肌一直处于非激活状况,而正着走在支撑阶段的第1双支撑期保持较高的肌肉激活状况;(3)从单步支撑过程该肌放电总量来看,正着走明显高于退着走,且肌肉活动时值正着走也明显长于退着走(47.5%±7.2%对31.3%±4.6%,Plt;0.05)(见图8b、表2)。
2.4.3 股外肌肌电特征 股外肌(VL)是股四头肌的一部分,主要功能为纯粹伸膝。(1)该肌在2种走模式下的摆动期肌电特征几乎一致,都是在摆动前期被激活,随即停止放电直到摆动结束,摆动期肌电均值无差异,但正着走时的肌电最大值要高于退着走(肌电最大值是(301±20)μv对(236±29)μv,Plt;0.05);(2)退着走的第1双支撑及单支撑期,VL几乎处于非激活状况(占约32%个步态),直到第2双支撑前期才开始激活,正着走整个支撑阶段,VL都处于活动状态,特别在单支撑期及第2双支撑期内均保持相当高的激活水平;(3)从单步过程该肌放电量看,正着走高于退着走;(4)从肌肉激活的时值看,正着走明显长于退着走(73.5%±4.9%对52.5%±3.5%,Plt;0.05)(见图8c、表2)。
2.4.4 股内肌肌电特征 2种走模式下,股内肌的肌电特征与股外肌的表现非常相似。(1)2种走情况下,摆动的早期阶段,股内肌肌电活动规律相似,但活跃度差异明显,无论是肌电均值还是最大值,正着走都明显高于退着走;(2)退着走的第1双支撑期,股内肌基本上不活动,而正着走在进入支撑阶段约8%个步态期后迅速爆发肌电,直至整个支撑期结束;(3)从各支撑阶段股内肌放电量看,在第2双支撑期差异不明显((254±34)μv对(235±22)μv,Pgt;0.05),主要差异体现在第1双支撑及单支撑期,正着走显著高于退着走((108±21)μv对(51±8)μv,Plt;0.05;(289±41)μv 对(210±23)μv,Plt;0.05);(4)从肌肉激活的时值看,正着走激活时间明显长于退着走(69.5%±6.3%对55.8%±4.6%,Plt;0.05)(见图8d、表2)。
2.4.5 腓肠肌(内、外)侧肌电特征 腓肠肌在近固定情况下有屈踝、屈小腿之功能,而在远固定的情况下,可对踝关节和膝关节进行加固,防止人体前倾,维持人体直立姿态之能力。(1)无论是正着走还是退着走,腓肠肌内、外侧肌电活动规律趋于一致,但就活跃度而言,腓外侧肌激活程度显著高于内侧肌;(2)退着走时,腓肠肌外侧肌电活动是所测8块肌肉中肌电活动最强的一块;(3)退着走模式下的摆动期,腓肠肌内、外侧几乎都不活动,而正着走模式下,腓肠肌内、外侧在摆动初期均出现少许的激活时值;(4)正着走的整个支撑阶段,腓肠肌内、外侧表现相同的特征,都在第1双支撑及单支撑期处于活动状态,随即失活约8%个步态周期,在进入第2双支撑后期又突然爆发肌电,而退着走的整个支撑阶段,腓肠肌内、外侧都一直处于活动状况,且在第2双支撑期,其激活达到顶峰;(5)在整个单步周期中,无论是内侧还是外侧均表现出退着走模式下肌电活动显著高于正着走;(6)从放电时值看,腓肠肌外侧在2种走模式下差异不明显(52.4%±6.3%对51.8%±5.5%,Pgt;0.05),而腓肠肌内侧在正着走情况下放电时值略长(68.3%±5.7%对54.0%±4.2%,Plt;0.05)(见图8e、图8f、表3)。
2.4.6 胫骨前肌肌电特征 (1)正着走时,整个摆动阶段,胫骨前肌的肌电活动都非常活跃,在第1双支撑及单支撑期,胫骨前肌几乎失去活动,而在第2双支撑期肌电活动又达到顶峰;(2)退着走时,除了摆动前期胫骨前肌不活动外(占10%个步态),在余下90%个步态周期内,胫骨前肌一直处于较强的激活状况;(3)退着走的第1双支撑及单支撑期,胫骨前肌的肌电活动大大高于正着走,而在第2双支撑期,正着走的肌电活动明显高于退着走;(4)在整个单步周期中,退着走模式下肌电活动显著高于正着走;(5)退着走时,胫骨前肌的肌肉激活时值显著高于正着走(92.5%±6.1%对55.2%±6.8%,P<0.05)(见图8g、表3)。
2.4.7 比目鱼肌肌电特征 (1)正着走时,除了摆动初期,该肌有微弱的短暂活动外(占约8%个步态周期),整个摆动阶段,比目鱼肌并不活动,比目鱼肌的肌肉激活主要体现在第1双支撑和单支撑期,而到了第2双支撑期,该肌又几乎停止活动;(2)在整个单步周期中,退着走模式下肌电活动显著高于正着走;(3)退着走时,整个步态周期内,比目鱼肌一直处于激活状态,特别在整个支撑期,该肌活动强度非常高,并在第2双支撑期,肌电活动达到顶峰;(4)退着走时,比目鱼肌的激活时值显著高于正着走(95.2%±6.9%对57.6%±7.5%,Plt;0.05)(见图8 h、表3)。
3 分析与讨论
(1)从运动学观点看。与正着走相比,退着走的步速、步频下降,跨步长变短,单步时间、双支撑时间、第1双支撑时间显著延长;支撑过程中,踝最大背屈角明显增加,摆动中最大跖曲角变小,整个单步过程中,踝关节的运动范围显著变小;前摆开始最大屈膝角、摆动中最大屈膝角及整个单步膝角变化范围都显著变小;支撑期最大伸髋角明显缩小,脚跟蹬离时屈髋角及整个单步周期髋的变化范围明显缩小;2种走模式下,只有单支撑时间、摆动时长及摆前踝关节最大跖曲角没有明显差异。
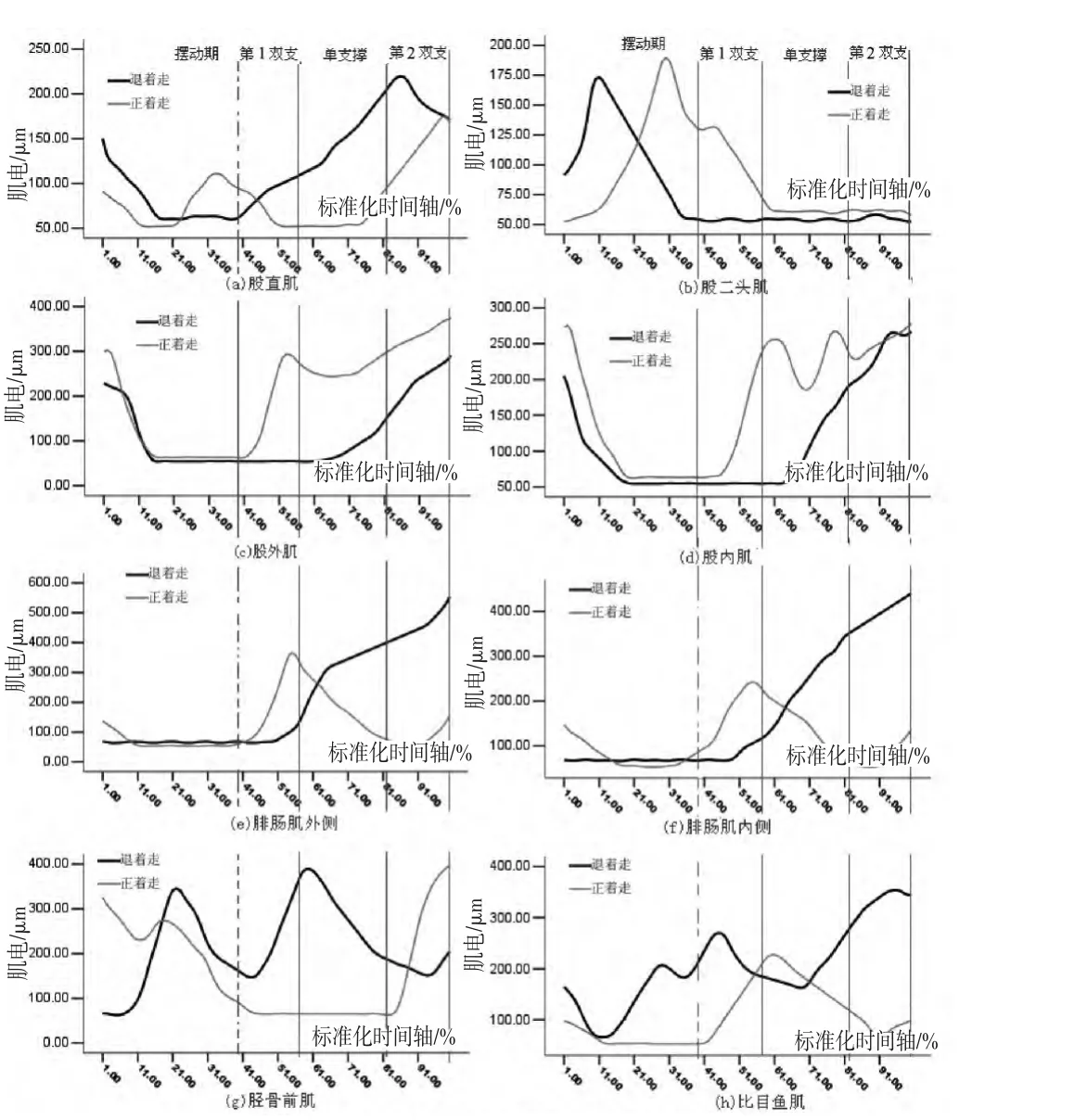
图8 单步周期内股直肌、肌二头肌、股外肌、股内甩、腓肠肌内外侧、胫骨前肌及比目鱼肌共8块肉肌电随时间变化特征Figure8 The EMG characteristics along with time of single step cycle about the rectus femoris,biceps flexor cruris,vastus lateralis,vastus medialis,gastrocnemius medial,lateral gastrocnemius,tibialis anterior muscle and soleus muscle
2种走模式相关运动学参数的巨大差异,主要是因为退着走时,受试者看不到前进的方向(盲区),故在正常的自然步态下,退着走步速、步幅等出现明显的下降,本研究所获得的上述差异特征与先前相关研究成果基本类似[13-14],但在某些方面却有所不同。有学者认为[15],退着走在脚趾触地时,踝关节处于背伸状态,而在随后的整个支撑阶段,踝关节一直跖屈,膝关节在整个支撑阶段一直处于伸展状态,在摆动期一直处于屈曲状态,髋关节与膝关节恰好相反,在整个支撑阶段处于屈曲状态,而在摆动期处于伸展状态。本研究发现,除了髋关节特征与该学者研究一致外,膝关节在整个支撑阶段只在摆动的大多数时间内屈,踝关节在脚趾触地后背伸,而在随后的大部分支撑期跖屈。
从步态结构看,正着走与退着走的踝关节动作模式几乎完全相反,退着走蹬离时以跟骨为杠杆支点,在支撑阶段结束时通过背屈机制进行调解,而正着走是以脚趾跖骨关节为支点,通过跖屈机制进行调解。与正着走相比,退着走的髋关节动作模式变化不像踝关节那么突出,但还是存有一些细微的差异,如从脚趾碰地到最大缓冲结束,髋除有少许伸展外,整个退着走期间,髋关节后伸能力明显不如正着走。令人惊奇的是,本研究将退着走髋、膝、踝关节角位移的时间轴反转后,再与正着走在同一坐标系里画图比较,由于时间反转后着地的模式相同(即都变成了脚跟着地、脚趾离地),结果发现,2种走模式下髋、膝、踝关节角位移随时间变化非常相似。THORSTENSSON让受试者以相同的速度进行正着走与退着走比较时发现,2种走存在类似的模式与变化范围,因此推测,不同的关节运动模式并没有引起端点动作的改变,并大胆推测人类行走时,大腿是作为一个单元(协调结构)被控制。本研究受试者正着走与退着走速度不同,单步时长不同,但所有受试者都按一个单步标准化后,结果获得2种走模式下,正着走与反向后的退学走髋、膝、踝关节角位移的相似性,这进一步左证了THORSTENSSON的猜测,也符合HALBERTSMA的末端控制学说[16]。
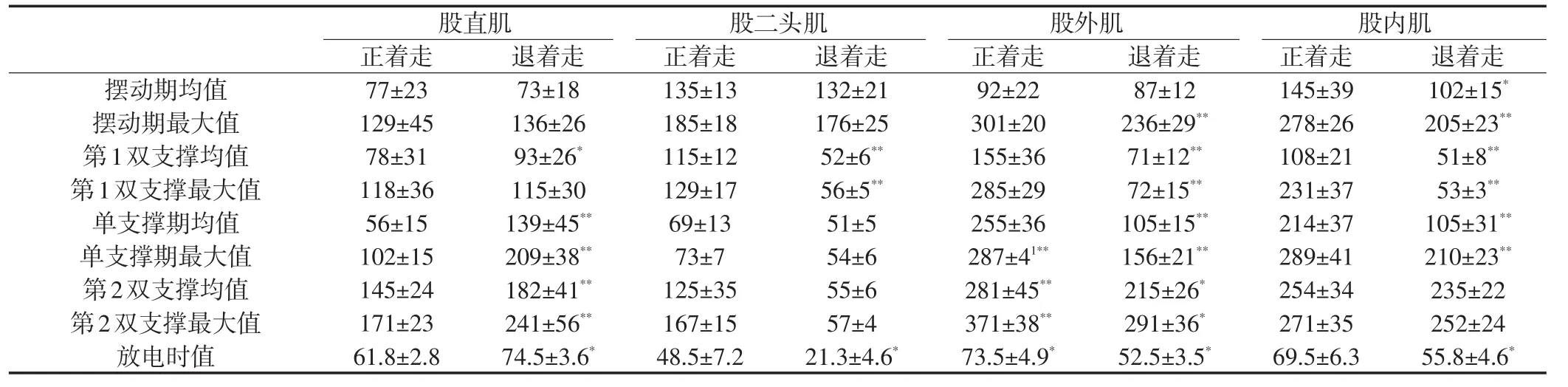
表2 表面肌电测试参数特征统计表(一)/μvTable2 The statistic table of surface EMG parameters(No.1)/μv

表3 表面肌电测试参数特征统计表(二)/μvTable3 The statistic table of surface EMG parameters(No.2)/μv
(3)从动力学及肌电活动观点看。正着走与退着走的垂直力曲线模式有所不同,在着地加载期,垂直力迅速增加以支持身体体重。在支撑中期,膝关节屈曲,测力板快速卸载,垂直力迅速下降至低于体重。本研究获得垂直力的2个峰在正着走时大致对称,这与先前研究类似[14]。退着走着地时体重引起的加载使第1峰值总是大于脚跟离地造成的第2峰值,即退着走期间,垂直力(GRF)第2峰值小于第1个峰值,这可能是因为退着走时,人体有后仰意识从而引起膝关节和髋关节上扬,这种动作对增加向后的驱动力是有益的,然而正着走垂直力曲线呈现的平台段在退着走的前摆阶段并末明显看到。
退着走时,踝关节在着地缓冲加载响应期,它的主要功能是减速及吸收震荡。本研究肌电测试显示,腓肠肌内、外侧和比目鱼肌在这个阶段非常活跃,这些肌肉被激活(离心-向心收缩,即SSC收缩),便于踝关节减速并吸收功率。在支撑中期,踝关节跖屈以使躯干向后运动,此时应是产生退着走期间最大功率阶段。正如格拉索等[8]的研究,退着走期间主要推力是由膝、髋关节伸肌提供。然而,本研究并不支持这种观点,认为退着走期间,踝关节产生比膝和髋关节更多的功率,其理由是本研究所测支撑腿8块肌肉中(大、小腿各4块),大腿的4块肌肉(股直肌、股二头肌、股内肌及股外肌)在正着走时,除了股直肌肌电活动量低于退着走外,其余3块肌肉活动量均高于退着走;而所测4块小腿肌中(腓肠肌内侧、腓肠肌外侧、胫骨前肌及比目鱼肌),退着走时,4块小腿肌肌电活动均显著高于正着走。
膝关节处,退着走时,脚趾触地初期,膝关节屈曲,从触地后至支撑中期膝关节开始伸展,支撑结束时膝关节轻度屈曲以降低身体重心,这种模式一方面有利于对侧足触地,另一方面为身体后退时增加推进力作准备。肌肉肌电活动提供的信息也正好说明这个事实,即退着走从脚趾触地到支撑期结束(见图8a),股直肌被激活并一直持续至第2双支撑期末,膝关节处于伸展状态以确保身体重心不下降。
髋关节处,退着走整个步态周期中,该关节极少屈曲或伸展,在脚趾着地加载期,髋关节屈曲,此时有利于髋关节产生功率;在支撑末段(蹬伸结束时),髋的屈曲力矩转化为伸力矩以确保退着走时躯干伸直(与地面垂直);本研究所测得股二头肌从摆动前期被迅速激活,其目就是使摆动期伸髋及防止摆动期膝关节伸展。基于这些关节功及肌肉肌电变化特征,本研究认为,退着走时踝关节应是产生推进力和减小震荡的重要关节,而正着走时,其推进力应主要由髋与膝承担。
与正着走相比,退着走由于姿态不稳定、缺乏前进的视觉反馈使之更难且要求更高,因而退着走对训练人类大脑平衡功能非常有益。HACKNEY等[6]研究表明,由于帕金森病人的注意力方面不如正常人,因此,即使是一个简单向后行走动作,其所表现出来的不对称步态[17]是非常显著的。本研究发现,关节角模式在正向走和时间反向的退着走之间的类似性,是否可以被解释为神经机制修改所致,从而可以推证退着走练习可修改神经机制而有助于运动学习,这对受损的肌肉骨骼功能再教育是非常有益的。
从正常向前走改变为向后走对绝大多数人而言是相当容易的事情。然而,从控制的观点,这却提出了一个有趣的问题,肌肉的活动模式不得不发生变化以便产生大腿的反向运动及向后行走的驱动力。本研究发现,大腿不仅运动方向反向,而且在相反方向上沿着几乎相同的路径运动,显然,这种反向运动是通过修改正常动作程序完成的,这些程序变化水平与下肢各关节运动密切相关。2种走模式下动作方向的反向性,理应引起肌肉活动周期出现较大幅度的时相转移,遗憾的是,本研究并没有证明这一点。被测8块肌肉中,在摆动期只有4块出现时相转移,与正着走相比,退着走的胫骨前肌、腓内侧肌、腓外侧肌分别延迟约7%、14%、8%个步态周期,而股二头肌则提前约15%个步态周期;在支撑阶段,出现时相转移的肌肉也有4块,转移幅度相对较大,与正着走相比,退着走时的股直肌、胫骨前肌分别提前约25%、45%个步态,而股外肌、股内肌则分别延迟约35%和28%个步态。尽管本研究这些数据与GRILLNER[15]预期值(50%时相转移)相差较远,但与布福德等[18]及THORSTENSSON等[8]的研究有相近之处。众多学者都一致认为,2种走模式下,下肢相关肌肉激活模式的时相转移应在恒定的范围内,但由于各种原因目前对这个恒定范围没有形成共识,有关这方面研究有待于进一步探讨。
4 结 论
(1)正着走与时相反转后退着走的髋、膝、踝关节角位移特性非常相似,但2种走模式下的关节运动范围表现为退着走显著小于正着走;正常步态行走下,退着走在步速、步频、跨步长等方面显著短于正着走,单步时间、双支撑时间、第1双支撑时间则显著变长;与正着走相比,退着走支撑过程中踝最大背屈角明显增加,而摆动中最大跖屈角、摆前最大屈膝角、摆动中最大屈膝角、支撑期最大伸髋角及脚跟蹬离时屈髋角明显缩小。
(2)肌电特征表明,正着走时,所测4块大腿肌肉中,除股直肌肌电活动低于退着走外,其余3块肌肉(股二头肌、股内肌及股外肌活动)显著高于退着走;4块小腿肌中,退着走时,腓肠肌内侧、腓肠肌外侧、胫骨前肌及比目鱼肌的肌电活动均显著高于正着走。肌肉肌电活动表现形式进一步肯定了退着走时,踝关节是主要驱动源。
(3)试验中,并未观察到2种走模式下的动作反向性所引起的肌肉活动周期大幅度时相转移。在出现的少数肌肉时相转移中,前摆阶段有4块——胫骨前肌、腓内侧肌、腓外侧肌及股二头肌,但转移幅度在15%个步态周期内;支撑阶段,出现时相转移的肌肉也有4块——股直肌、胫骨前肌、股外肌、股内肌,但转移幅度均未能超出45%。
[1]FLYNN T W ,SMUTOK S M,MICHAEL A,et al.Comparison of cardiopulmonary responses to forward and backward walking and running[J].Medicine and Science in Sports and Exercise,1994,26:89-94.
[2]FLYNN T W C,SOUTAS-LITTLE R W.Patello femoral joint compressive forces in forward and backward running[J].Journal of Orthopaedic and Sports Physical Therapy,2006,21:277-282.
[3]KATSAVELIS D,MUKHERJEE M,DECKER L,et al.Variability of lower extremity joint kinematics during backward walking in a virtual environment[J].Nonlinear Dynamics Psychology and Life Sciences,2010,14:165-178.
[4]VAN DEURSEN R W,FLYNN T W,MCCRORY J L,et al.Does a single control mechanism exist for both forward and backward walking[J].Gait and Posture,1998,7:214-224.
[5]YANG Y R,WANG R Y,YEN L L,et al.Gait outcomes after additional backward walking training in patients with stroke:a randomized controlled trial[J].Clinical Rehabilitation,2005,19:264-273.
[6]HACKNEY M E,EARHART G M.Tai Chi improves balance and mobility in people with Parkinson disease[J].Gait and Posture,2008,28:456-460.
[7]GRASSO R,BIANCHI L,LACQUANITI F.Motor patterns for human gait:backward versus forward locomotion[J].Journal of Neurophysiology,1998,80:1868-1885.
[8]THORSTENSSON.How is the normal locomotor program modified to produce backward walking[J].Experimental Brain Research,1996,61:664-668.
[9]赵焕彬,霍洪峰,张静,等.老年人健身背向走的足底压力与步态特征[J].中国康复医学杂志,2010,25(5):436-438.
[10]王瑞元,熊开宇.大负荷运动过程中股外肌做离心工作、向心工作和等长工作时的肌电变化[J].体育科学,1992(2):53-55.
[11]YELNIK A,BONAN I,DEBRAY M,et al.Changes in the execuition of a complex manual task after ipsilateral ischemic cerebral hemispheric stroke[J].Arch Phys Med Rehabil,1996,77:806.
[12]HACHISUKA K,UMEZU Y,OGATA H.Disuse muscle atrophy of lower limbs inhemiplegic patients[J].Arch Phys Med Rehabil,1997,78:13.
[13]MUDDASIR A,NANDA K T R.The effect of backward walking treadmill training on kinematics of the trunk and lower limbsSerbian[J].Journal of Sports Sciences,2009,3:121-127.
[14]VILENSKY J A.A kinematic comparison of backward and forward walking in humans[J].Journal of Human Movement Studies,1987,13:29-50.
[15]GRILLNER S,BUCHANAN J T,WALLEN P,et al.Neural control of locomotion in lower vertebrates:from behavior to ionic mechanisms[M]//COHEN A H,ROSSIGNOL S,GRILLNER S.Neural Control of Rhythmic Movements in Vertebrates,Wiley.New York :Eamp;FN spon,1988.
[16]HALBERTSMA J M.The stride cycle of the cat:the modeling of locomotion by computerized analysis of automatic recordings[J].Acta Physiol Scand,1983,521:4-75.
[17]KATSAVELIS D,MUKHERJEE M,DECKER L,et al.Variability of lower extremity joint kinematics during backward walking in a virtual environment[J].Nonlinear Dynamics Psychology and Life Sciences,2010,14:165-178.
[18]BUFORD J A,SMITH J L.Adaptive control for backward quadrupedal walking II[J].Hindlimb muscle synergies J Neurophysiol,1990,64:756-766.
Biomechanical Mechanism about Forward and Backward Walking
ZHANG Tingran,LUO Jiong,WANG Xiang,LAI Bin,SONG Jixiang,WU Zhaoqun
(School of PE,Southwest University,Chongqing 400715,China)
Objective:This study expects to reveal the relevant biomechanical mechanism of backward walking(BW)in order to provide the biomechanical basis for popularizing fitness model of BW.Methods:The kinematics,dynamics,EMG means have been used synchronously to obtain biomechanical parame⁃ters,and the hip,knee,ankle and foot joint torque and joint function were gained by inverse dynamics.Results:Compared with forward walking(FW),the subjects of BW have superior influence towards direction and show a decline significantly in speed and stride length of walking,and a increase significantly in single-step length,double support length and the first double support length.While the two related joint angular displacement show striking similarity during both model of walking.Ankle moment mode in FW and phase inversion BW also shows similarity surprisingly.However,knee,and hip joints moment mode are not so similar to ankle joint.Joint power of knee,ankle and hip have larger differences in both of walking and conclude the main driving force and shock absorption of BW coming from the ankle and knee,hip joint can produce hardly any push power.EMG data show.When the subjects were FW,EMG activity of rectus femoris was more inactive than the EMG activity when the subjects were BW.When the subjects were FW,EMG activity of biceps femoris,vastus medialis and vastus lateralis were more active than the EMG activity when the subjects were BW.When the subjects were FW,EMG activity of medial gastroc⁃nemius,lateral gastrocnemius,tibialis anterior and soleus were more actively than the EMG activity when the subjects were FW.EMG data further provide ev⁃idence for the power source of the ankle joint in BW.In FW,its power source is as mainly undertaken by the hip and knee joint.Conclusions:Practice of BW can modify the neural mechanisms and contribute to motor learning which is beneficial to the impaired musculoskeletal function re-education.Patella femoral joint endure lower reaction force from the ground during BW,therefore,BW is beneficial to the recover for injured patients overusing the lower extremity.
forward wolking;backward walking;biomechanics
G 804.6
A
1005-0000(2014)01-081-07
2013-09-12;
2013-12-23;录用日期:2013-12-24
张庭然(1990-),男,山西晋中人,在读硕士研究生,研究方向为全民健身和运动技术诊断;通信作者:罗 炯(1966-),男,湖南邵阳人,教授,研究方向为全民健身和运动技术诊断。
西南大学体育学院,重庆400715。
猜你喜欢
临床军医杂志(2022年2期)2022-02-25 02:54:28
仪表技术与传感器(2021年11期)2021-11-29 04:52:36
小天使·初中版(2021年9期)2021-09-18 19:16:22
当代医药论丛(2021年8期)2021-04-29 14:35:24
当代陕西(2019年17期)2019-10-08 07:42:00
石油沥青(2019年1期)2019-03-05 08:25:46
中国CT和MRI杂志(2018年9期)2018-09-14 03:05:18
燕山大学学报(2014年2期)2014-03-11 15:28:20
河南科技(2014年16期)2014-02-27 14:13:17
世界中医药(2010年1期)2010-11-13 02:05:16