
基于模糊PI的天线伺服控制
2014-05-08 09:57周洪波潘玉霞杨立芬
河北省科学院学报 2014年4期
周洪波,潘玉霞,杨立芬
(1.中国电子科技集团公司第五十四研究所,河北 石家庄 050081;2.河北工程技术学院,河北 石家庄 050000;3.石家庄财经职业学院,河北 石家庄 050000)
与传统控制理论相比,模糊控制有两大优点,第一,模糊控制在许多运用中可以有效且便捷地实现人的控制策略和检验。第二,模糊控制可以不需要被控制对象的数学模型即可实现较好的控制,这是因为被控对象的动态特性已经隐含在模糊控制器的输入、输出模糊集及模糊规则中了。在现实运用中,当被控对象的数学模型未知,但是根据经验或者知识能够判断它具有较强的非线性或者时变系统或者非线性时滞系统,这就要采用模糊控制。然而,应该意识到全世界有约90%的工业过程自动控制是有PI控制器实现的。PI控制可以有效的控制线性系统或者一些非线性系统。在实际运用当中,控制器并非越“先进”越好,越复杂越好,从运用角度来看,简单易行才是至关重要的,PI控制器在这方面有着别的控制器无法比拟的优势。
1 环路控制器设计
针对位置环路控制,采用多模态控制,如果位置误差大于一个阀值时,用大比例控制,当天线的位置误差小于一个阀值时,利用PI控制。当天线误差介于俩个阀值之间时,用模糊控制。从而实现多模态控制。大比例控制,可以实现天线快速响应的目的。模糊控制,可以起到较少系统超调的作用。而PI可以实现很好的稳态误差作用。其控制系统框图,如图1所示。
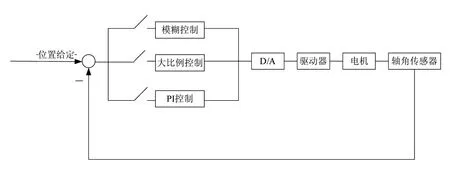
图1 天线位置环路校正原理图
2 模糊控制设计
模糊控制器输入量为实际的天线角度,误差为给定角度和轴角采集实际角度之间的差值,e=y给定-y反馈及其变化率˙e,˙e即为天线的速度,可以用陀螺传感器获得。输出变量为驱动器的A/D给定值。这样就为天线的位置环路控制系统选定了一个双输入、单输出结构的模糊控制器。这样的模糊控制器具有PD控制的规律。有利于系统的稳定性,较好的减少响应过程的超调量以及消弱其振荡现象。如图2所示。
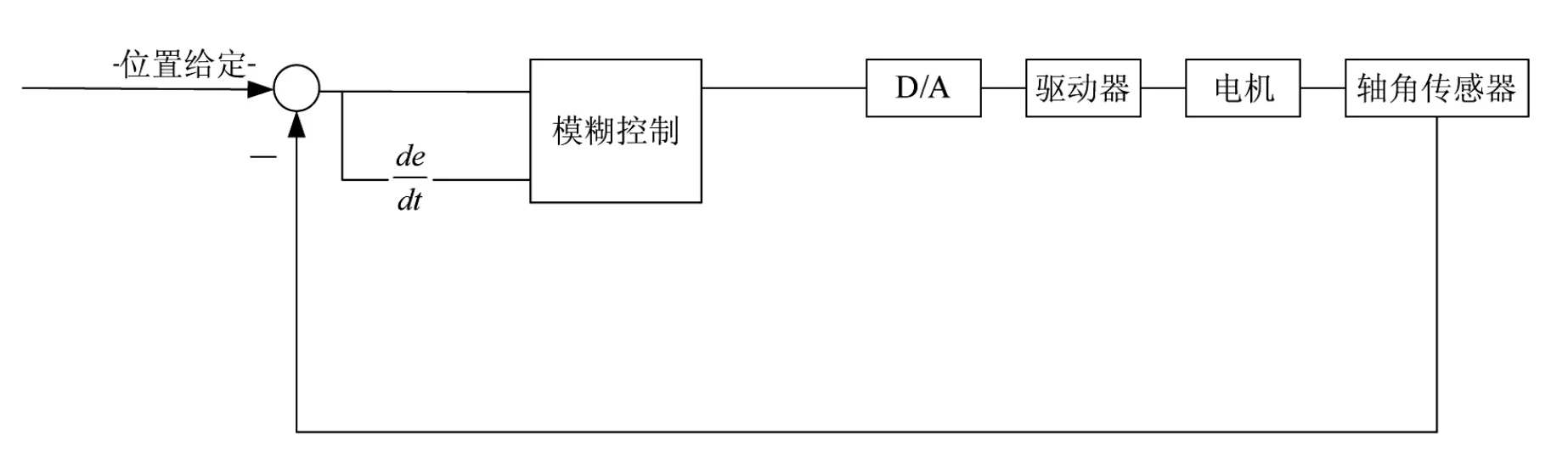
图2 模糊控制原理图
2.1 位置误差输入量的模糊化
模糊控制的阀值取为天线的波束宽度。如某机载天线的波束宽度为6°,那么位置误差e的论域选为:输入误差模糊化等级,采用e={负大,负中,负小,零,正小,正中,正大}={NB,NM,NS,ZO,PS,PM,PB},e的论域选为{-12,-11,-10,…,0,…,10,11,12},隶属函数采用窄带三角型函数,因为,窄带三角函数具有很好的收敛性。
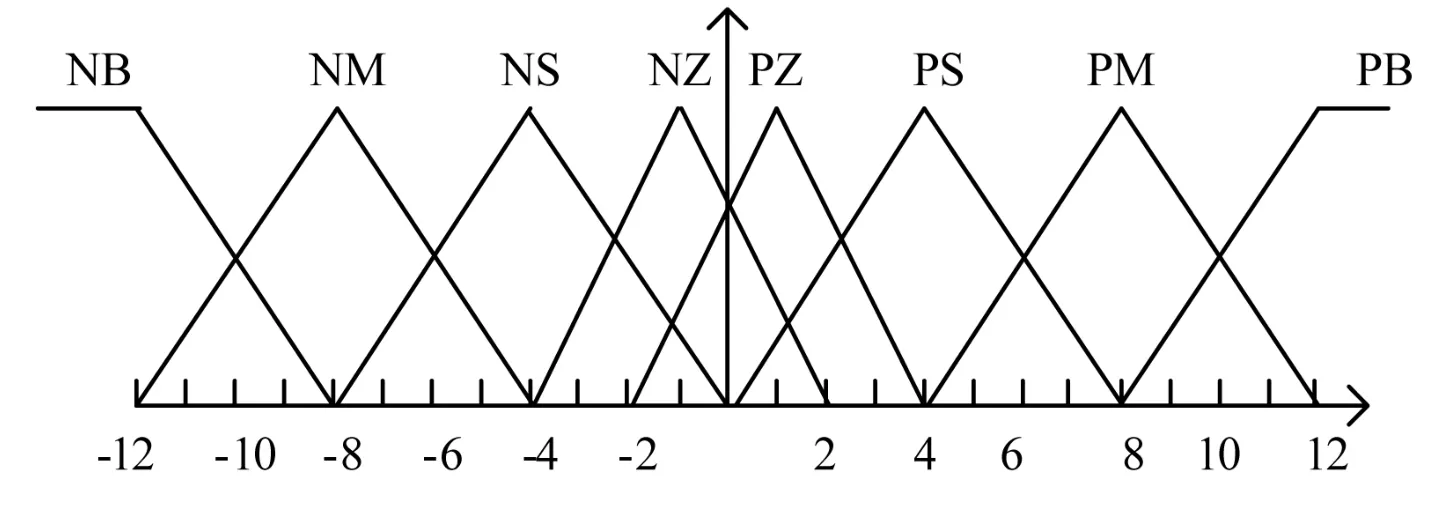
图3 误差论域和模糊集合的隶属度函数
则其隶属度函数表,如表1所示。

表1 误差论域模糊集合隶属度函数表
误差的变化率(速度)模糊化,天线的最大速度为65°/s,1V模拟电压,对应的速度为6.5°/s。的论域的语言值选取{PB,PM,PS,ZO,NS,NM,NB},如图4所示,隶属度表如表2所示。
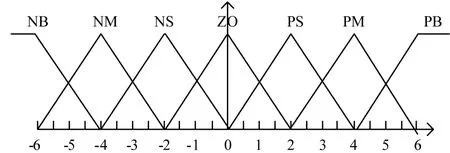
图4 误差变化率(速度)论域和模糊集合的隶属度函数图
2.2 位置误差变化率的模糊化
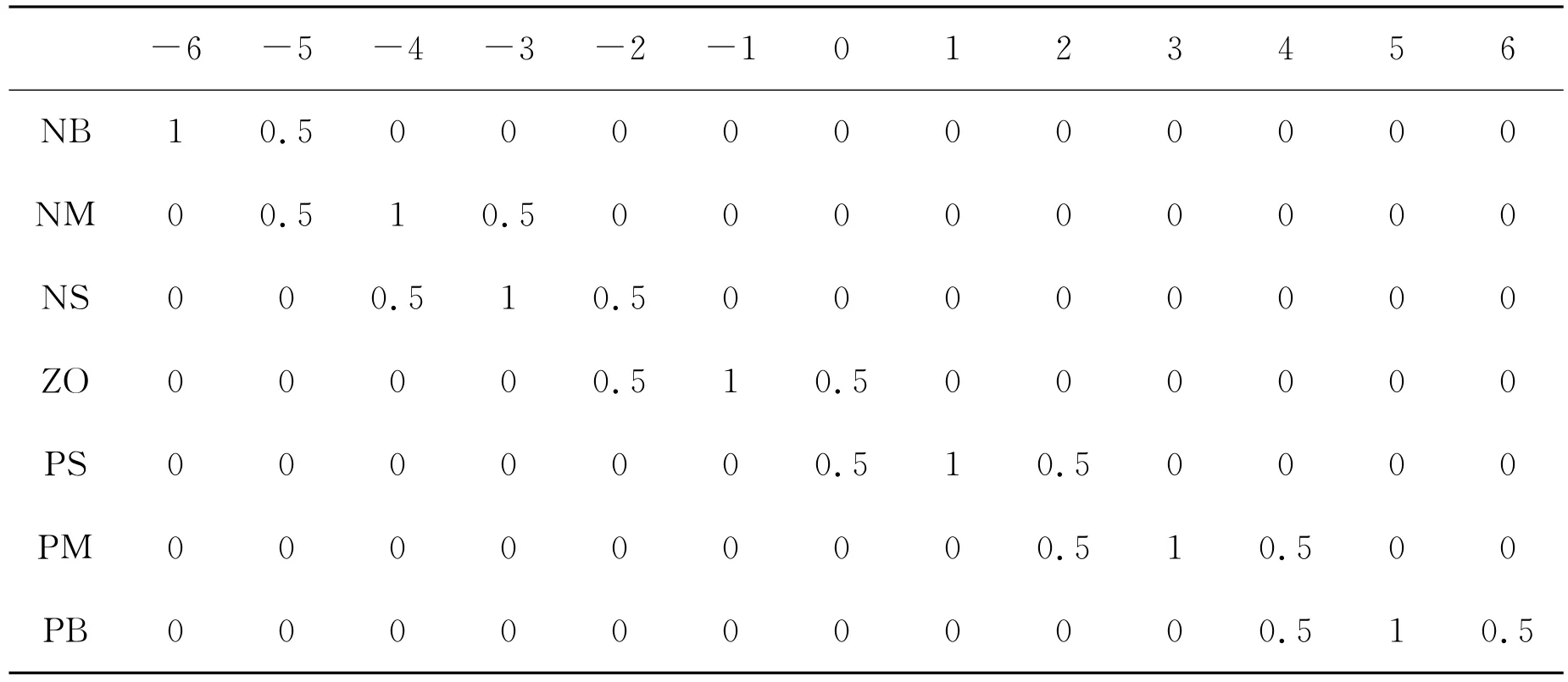
表2 误差变化率(速度)论域和模糊集合的隶属度函数表
2.3 输出量的模糊化
输出量,是AD7537的输出模拟电压值。通过实验,1V给定对应6.5°/s,取输出的范围为[-2,+2],输出变量的论域选为{-7,-6,…,0,…,6,7},选取其语言值为{PB,PM,PS,ZO,NS,NM,NB}。输入的隶属函数μ(x)取正态分布函数。得到语言变量的赋值表如表3所示。
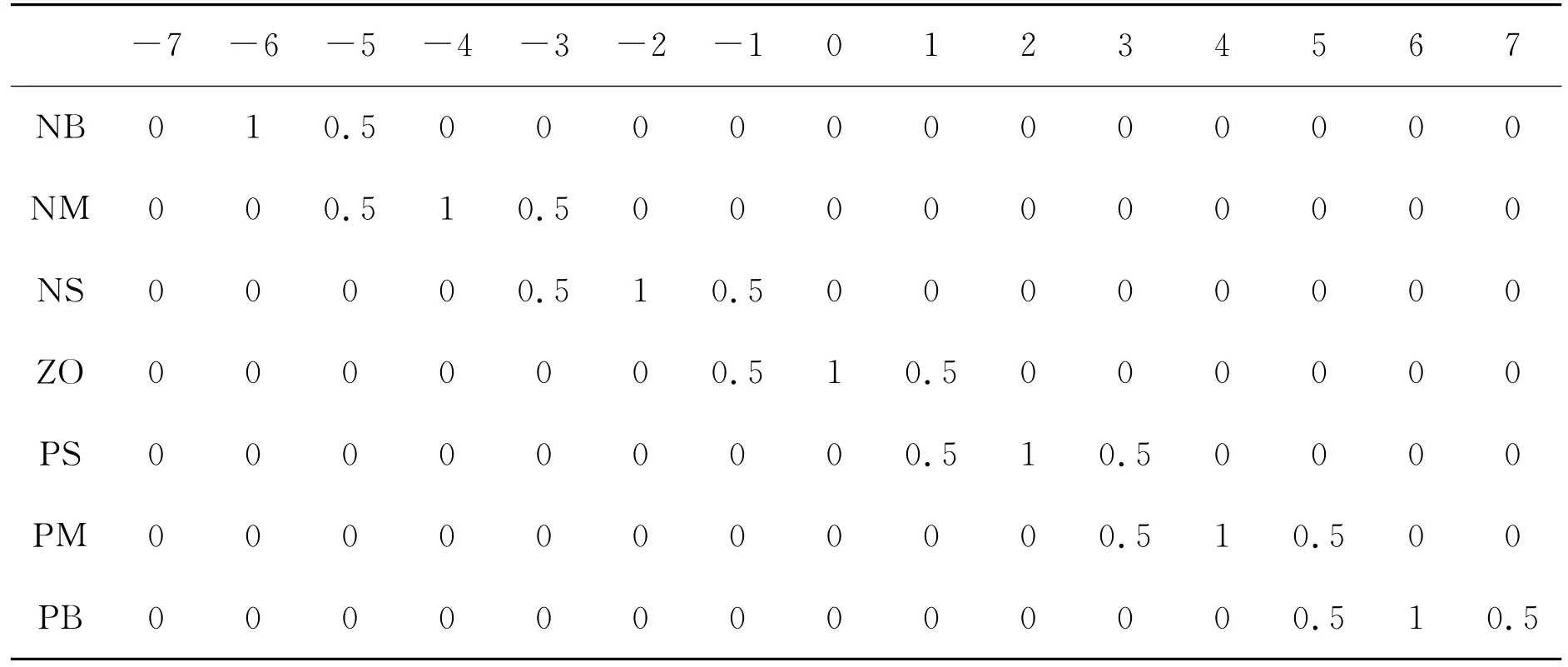
表3 输出语言变量的赋值表
2.4 建立模糊规则状态表
模糊规则的条数n=7*8=56。这些规则对于双输入(e和˙e)、单输出(U)的模糊控制器,采用以下形式:

如if e=PB and˙e=PB then U=PB以上模糊规则所表达的物理意义为:当天线的位置环路误差为正最大且此时天线的速度是在向反方向最大速度变化,此时的输入,应给向位置误差变小的速度方向的最大值。此56条规则构成一个表,如表4,为天线位置环路控制系统的模糊状态表。
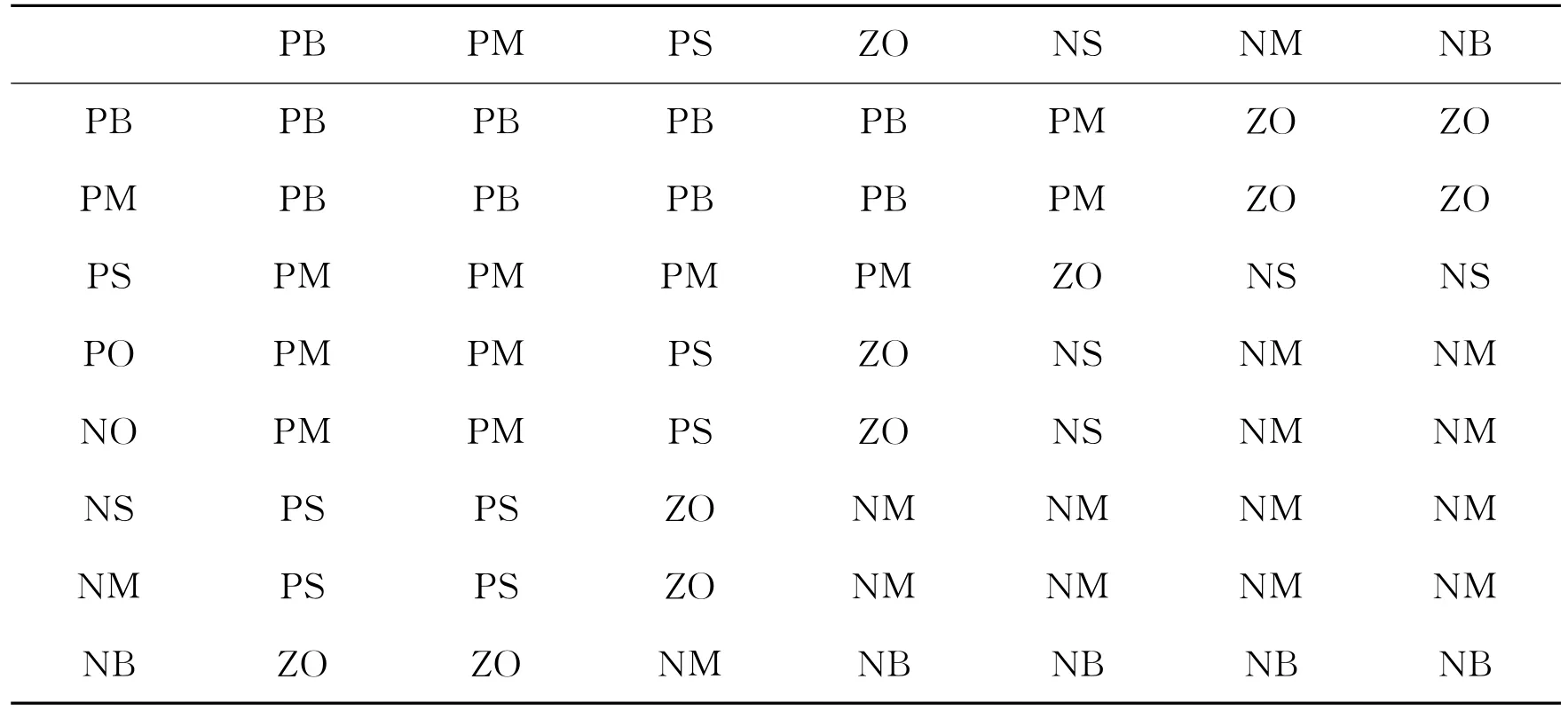
表4 模糊状态表
3 PI控制器设计
PI控制器如图5所示。
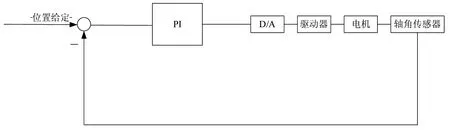
图5 PI控制系统原理图
PID控制器是一种线性控制器,它根据给定值yd(t)与实际输出值y(t)构成控制偏差E(t)=yd(t)-y(t)PI的控制规律的时域表达式为:

PID的控制规律的频域传递函数为:

实际运用中,采用PI控制。即把上面的式子中的微分项。
对上式子,进行Z变换,转换为差分方程。选在采样周期为50ms。在计算机控制系统中实现,则控制系统可写成如下形式:

或者:
比例环节成比例的反映控制系统的偏差信号,偏差一旦产生,控制器即产生控制作应,以减少偏差,积分环节主要用于消除静差。
4 结束语
针对天线位置环路调节,采用多模态控制器,在某机载天线上得到运用。控制效果显示,比单用PI,具有响应快,超调小,稳态误差小的优点。
[1] 诸静.模糊控制理论与系统原理[M].北京:机械工业出版社,2005.
[2] 应浩.关于模糊控制理论与应用的若干问题[J].自动化学报,2001,27(7).
[3] Zhang Xueming,Li Guohou,Shao Feng,Bai Linfeng,et al.Application of Fuzzy Control in the Servo System,IEEE,2009.
[4] 李会锋,孙越,康妮,李强.模糊控制在雷达天线控制系统中的应用[J].飞行器测控学报,2005,24(4).
猜你喜欢
厦门大学学报(自然科学版)(2022年4期)2022-07-15
成都信息工程大学学报(2021年6期)2021-02-12
现代装饰(2020年7期)2020-07-27
运筹与管理(2019年10期)2019-12-17
测控技术(2018年10期)2018-11-25
上海公路(2018年4期)2018-03-21
广东石油化工学院学报(2016年3期)2016-05-17
体育科学研究(2015年5期)2015-02-28
电测与仪表(2014年8期)2014-04-04
现代防御技术(2014年6期)2014-02-28
