
船舶驾驶台式操船模拟系统的设计和实现
2014-05-07 03:19郭磊王丹刁亮张成
船电技术 2014年12期
郭磊,王丹,刁亮,张成
船舶驾驶台式操船模拟系统的设计和实现
郭磊,王丹,刁亮,张成
(大连海事大学 轮机工程学院,辽宁大连 116026)
本文设计并实现了综合船舶航向控制与船舶旋转运动的半物理实验仿真系统,该系统主要由工控机、数据采集卡、自动舵机、罗经、变频器等硬件设备组成。通过模型解算得到船舶在各种海况下的运动状态,经过PI控制器输出变频器的转速控制信号,控制转台跟踪船舶模型。试验结果表明,该系统可以模拟出海上船舶的实际运动状态,为陆上教学实习提供了良好的环境。
船舶航向控制系统 船舶运动 半物理实验仿真系统
0 引言
航向控制是船舶运动控制中最基本的控制,自动舵和舵机为航向控制的重要环节,自动舵的全称是自动操舵仪,其功能是自动的、高精度的保持和改变船舶的航向,以保证船舶的正常航行[1]。船舶航行于海面上,其运动特性会因航速、水深、载重的不同而发生变化。除此之外,风、流、浪等,也会影响船舶航向的保持[2]。陆上实验设备往往不会考虑环境因素的影响,所以很难模拟出船舶在各种海况下的实际运动状态,无法满足教学实习的要求。为此,本文结合船舶运动模型和船舶航向控制设备,利用船舶模型解算在某一个实际海况各种外部因素作用下船舶实际的转角速率,应用PI控制算法输出控制转台转动跟踪船舶模型,设计并实现了一套半物理操船模拟系统[3]。试验结果表明,该系统可以真实地模拟出船舶操舵与转舵的实际运动状态。系统作为模拟船舶旋转运动的半物理仿真系统,使船电学生既可以感受操船运动,又可以了解船舶航向控制的结构,信号传输控制机理。
1 系统的结构及特点
旋转驾驶台式操船模拟系统是在传统船舶航向控制的基础上增加了船舶运动模型解算和转盘运动控制两部分,其系统框图如图1所示。
利用旋转平台模拟船舶,转台的转动模拟船舶的转向,自动舵由操船人员操纵,发出船舶控制信号,控制船舶舵机打舵。数据采集卡采集当前舵角信号和船速信号,输入到船舶运动模型解算获得在设置的海况下船舶实际的旋转速率,作为转盘运动控制的给定,232串口读取罗经的航向信号,计算获得实际旋转速率信号作为反馈,进行PI运算,控制变频器输出不同的转速和转向,使旋转平台转动跟踪船舶模型解算结果。最终形成一套完整的模拟实船旋转运动状态的半物理船舶仿真系统,可以模拟不同的海况下相同舵角船舶的运动状态,有利于学生体会船舶转向和舵角的关系,提高学生的技术水平。

图1 旋转驾驶台式操船模拟系统框图
2 船舶航向控制
船舶航向控制如图2所示,主要由自动操舵仪和模拟舵机两部分组成,自动操舵仪通常包括PID舵、自适应舵和智能舵三种[4],此处为PT21型自动舵,属于PID舵;罗经为安许茨4型电罗经,稳定时间短。左图中下方为旋转平台,用于模仿船舶转动;转台上为自动舵机,左右两侧挂有电罗经,随平台转动,模拟船艏转向,并显示船舶当前航向。右图中位于平台下方为模拟舵机,模拟船舶舵机功能。

图2 航向控制系统实物图
自动操舵仪发出转舵信号,控制模拟舵机转动舵角,在船舶航行时转变船舶运动方向,自动操舵仪按照船舶设计要求可以工作在自动、随动和应急状态,并配有两套控制系统,互为备用。两个设备之间通过自整角机进行控制信号的传递,舵角反馈信号由模拟舵机反馈给自动舵,实行舵角的闭环控制,实现舵机转舵角跟踪自动舵机的给定信号。模拟舵机同时输出一路实际舵角信号接舵角指示器,接线图如图3所示。
3 解算控制系统
船舶航向控制与船舶模型的结合以工控机为核心[5],工控机配套有数据采集卡和串口,进行实时数据的采集和控制信号的输出,模拟船舶航速的输入。工控机为主要的运算和控制设备,通过数据采集卡采集车种信号和舵角信号,串口通信获得来自罗经的船舶实际航向信号。经过模型解算和转盘控制解算后的控制信号由采集卡输出至变频器,驱动转台转动,实现整体的闭环控制。

图3 船舶航向控制系统接线图
3.1 船舶模型
船舶模型主要用于解算船舶旋转运动转角率,通过采集船舶舵角信号和车钟信号,可在设置的海况下解算获得接近实际海况下的船舶转角率,并模拟显示船舶海上航行的轨迹。
结合实船数据建立的船舶运动模型,通过设置初始参数将海风、海流、海浪等环境因素加入到模型中,获得在不同海况下的船舶运动状态。模型解算获得的船舶转角率为给定,串口获得的船舶实际航向信号运算得到的船舶实际转角率为反馈,进行PI控制[5],使转台转角率跟踪船舶模型解算的转角率。
船舶系统为大惯性环节,所以采样频率不用太高,整体工作频率为4 Hz即可达到比较理想的效果。同时为了提高采样准确度,采样的舵角信号和罗经信号采用均值滤波的方法,同时为了防止波动过大,设置有一定的死区。
3.2 数字调节器
整个系统作为一个大惯性环节,PI算法即可满足要求,加入微分环节会增加系统的震荡,不利于稳定运行,PI调节器是电力拖动自动控制系统中最常用的一种控制器[5],其控制系统原理图如图4所示。
图中()对应于船舶模型输出的转角率给定信号;()对应变频器的控制信号;被控对象为变频器驱动的转台(模拟驾驶台);()对应于电罗经的航向信号处理得到的实际转角率信号。

图4 PI控制算法
PI调节器的传递函数如下式所示:

若输入误差函数为e(t),输出函数为u(t),则u(t)和 e(t)关系的时域表达式可写成[6]:
式中:K——比例系数
K——积分系数,K=1/τ。
将式转换为差分方程,得到数字PI调节器的表达式。其第k怕输出为

式中:T——采样周期。
PI调节器输出增量式算法:

增量式算法只需当前的和上一排的偏差即可计算输出值。增量式PI调节器算法为:
增量式算法在程序实现中只需多保存上一拍的输出值就可以了,实现简单,且不会占用太多的存储空间,易于程序的实现。
PI控制器的参数整定采用工程上应用较多的试凑法,按照先比例(P),再积分(I)的顺序进行一步一步地确定。
增大比例系数K一般将加快系统的响应,在有稳态误差的情况下有利于减小稳态误差。置调节器的积分时间T为最大,在比例系数K按经验设置的初值条件下,将系统投入运行,观察在一定时间内模型解算的船舶动态与实际的模拟船动态,适当调节比例系数的大小,至两者跟踪情况基本一致,超调小,反应快。
增大积分时间T有利于减小超调,减小振荡,使系统更加稳定,但系统稳态误差的消除将随之减慢,引入积分作用(此时将上述比例系数设置为5/6K)。将T由大到小进行整定,使系统的稳态误差逐渐消除。
经过系数调整,转台转动已经较好地跟踪上了船舶模型解算的船舶动态。船舶运行符合实船的运动状态。
4 设备试验结果分析
由于设备的限制,转台正方向为罗经287°方向,因此只能在此基础上验证设备的运行情况。系统整体运行时船舶转向情况波形如图5-6所示。
图5为随动状态下,平静海况与加入海风影响的运动轨迹。左图为平静海况下,自动舵机运行在左舵5°下船舶转向运动;右图为4级西北风影响下左舵5度运动轨迹。图6为系统运行自动和手动两种模式下船舶转向的情况,左为随动右舵10°船舶偏转运动,右图为自动状态下定航向287°突转307°船舶转向图。
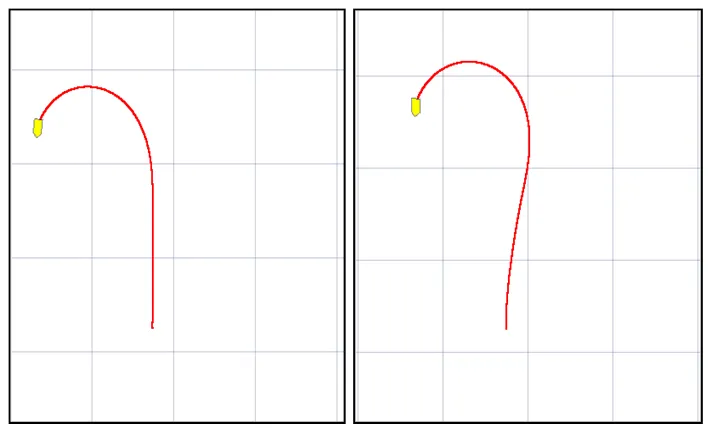
图5 平静海况与海风影响海况
作为航向控制系统,船舶自动舵工作在自动、随动和应急三种模式下才可满足船舶设计要求,自动和随动为自动舵的主要工作模式,应急状态为粗略控制船舶转向,因此这里主要验证自动和随动模式下船舶转向运动情况。
比较图5两图可知,在加入西北风影响后,船舶有明显的右偏趋势,船舶左转向速率变慢,体现出海风的影响;同时结合图6船舶在右舵10°的转向情况,将5°舵与10°舵相比较,10°舵角明显比5°舵转向要快。
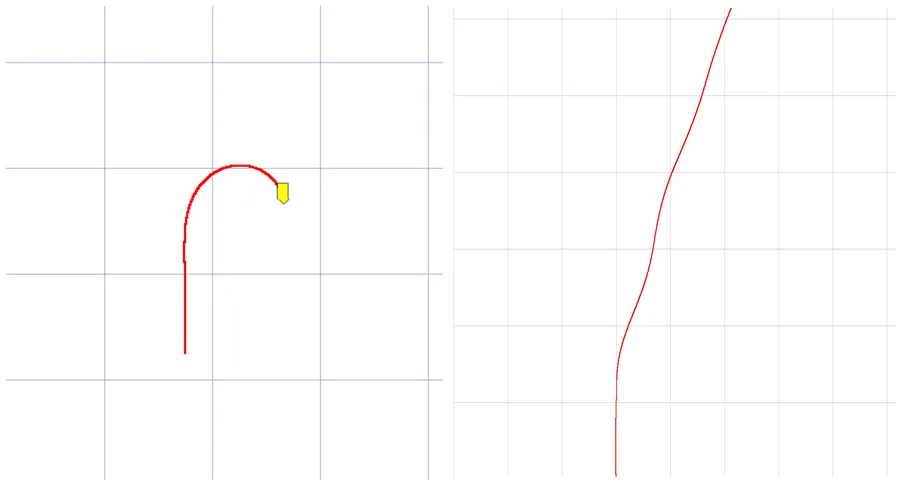
图6 船舶转向
由图6可知,自动模式下,船舶转向运动平滑且较快稳定,转向期间并没有较大的超调,短时间内就稳定在了新的给定航向上。从上面两个图可以看出,系统整体运行良好,船舶运动曲线符合实船运动规律,船舶转向比较平缓,没有出现较大的超调,跟踪上了船舶设计的航向。
5 结语
本文介绍了旋转驾驶台式操船模拟系统的结构和原理,在此基础上通过搭建了硬件平台。系统综合船舶航向控制系统和船舶运动模型,应用工控机、自动舵机等设备搭建,详细介绍了设备的连接情况和信号的作用,PI控制算法的原理和编程机理,通过试凑法确定其参数,并观察在各种控制状态下设备的运行状态,确定航向控制正确。该系统可以模拟不同的海况下船舶的实际运动状态,为学生操作感受海上船舶运动创造了良好的实习环境。
[1] 周永余, 陈永冰, 李文魁等. 船舶自动舵路上仿真系统的研制[J]. 航海工程, 2007, 36(1): 118-121.
[2] 罗丹青.船舶物理旋转平台及自适应舵的设计与研究[D]. 大连海事大学, 2010.
[3] 李建立. 船舶自动舵系统半实物仿真平台研究[D]. 重庆大学, 2010.
[4] 程启明, 刘其明, 王志宏等. 船舶自动舵控制技术发展研究[J]. 计算机自动测量与控制. 2000, 8(6): 1-4.
[5] 林永屹, 陈晓琴, 周涛. 基于非线性PID 的船舶航向自动舵设计[J]. 船电技术, 2009, (6) : 46-49.
[6] 韩春生, 刘剑, 汝福星等. 基于PID算法的船舶航迹自动控制[J]. 自动化技术与应用, 2012, 31(4): 9-12.
Design and Implementation of Maneuver Simulation System for Ship Bridge
Guo Lei, Wang Dan, Diao Liang, Zhang Cheng
(School of Marine Engineering, Dalian Maritime University, Dalian 116026, Liaoning, China)
U666 TP391.9
A
1003-4862(2014)12-0027-04
2014-05-27
受国家自然科学基金(61273137, 51209026, 61074017),辽宁省教育厅(L2013202),中央高校基本科研业务费(3132014047, 3132014321)
郭磊(1990-),男,在读硕士研究生。研究方向:风力发电并网控制
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
江苏船舶(2021年4期)2021-09-28
舰船科学技术(2021年8期)2021-09-18
新世纪智能(高一语文)(2021年3期)2021-07-16
装备制造技术(2020年3期)2020-12-25
舰船电子工程(2020年4期)2020-06-19
民用飞机设计与研究(2019年4期)2019-05-21
电子制作(2017年24期)2017-02-02
船海工程(2015年4期)2016-01-05
应用海洋学学报(2015年3期)2015-11-22
