基于最小二乘原理的电动舵机测试指令生成与应用
2014-05-07 02:16张明
船电技术 2014年10期
张明
基于最小二乘原理的电动舵机测试指令生成与应用
张明
(中国船舶重工集团公司第七一〇研究所,湖北宜昌 443003)
基于最小二乘原理同时结合傅立叶拟合原理,对水下无人航行器(UUV)电动舵机实际指令信号段进行了拟合,在兼顾曲线拟合效果、拟合曲线的复杂程度和计算成本的情况下,获得了贴近实际水下无人航行器(UUV)电动舵机控制指令的测试指令信号,为充分模拟水下无人航行器(UUV)电动舵机的工作条件、突破电动舵机实际测试中的局限性奠定了基础,使电动舵机性能的研究和测试更具有实际意义。
最小二原理 傅立叶拟合 电动舵机 指令信号 水下无人航行器
0 引言
目前,水下无人航行器(UUV)在海洋探索研究以及国防等领域中正发挥着越来越重要的作用,世界上许多国家都在从事水下无人航行器(UUV)的研究工作。水下无人航行器(UUV)电动舵机可以操纵航行器各个舵面的旋转、控制航行器的俯仰、航向及横滚,是UUV稳定控制回路的重要环节,对水下无人航行器(UUV)舵机性能的充分研究和测试是保障水下无人航行器(UUV)安全可靠运行的前提条件之一。
现行水下无人航行器(UUV)舵机测试方法主要是借鉴飞行器舵机的测试方案,所使用的电动舵机测试指令信号主要为梯形波和正弦波,不能充分模拟水下无人航行器(UUV)舵机的工作条件,在实际测试中具有较大的局限性。本文根据外场试验中得到的电动舵机指令信号段结合最小二乘法及傅立叶拟合原理来生成无人航行器舵机指令信号,使电动舵机性能的研究和测试更具有实际意义。
1 基本原理
1.1 最小二乘原理
最小二乘法(Method of Least Squares)是提供“观测组合”的主要工具之一,该方法以严格的统计理论为基础,广泛应用于许多科学研究领域,如物理学、化学、天文学、测地学以及医学和工程等学科的资料分析中,是一种科学而可靠的曲线拟合方法。

满足:

其中,曲线Φ可以指全体直线、全体抛物线、全体不超过次的多项式、全体指数、全体正弦函数等,曲线为曲线Φ中任一曲线。最小二乘拟合就是在一类曲线Φ中求一曲线与被拟合曲线在节点x, x, x,…,x的误差平方和(SSE)最小,则为最小二乘解。
1.2 傅里叶拟合原理
傅里叶拟合是一种利用一定频率的正余弦信号对实际指令信号进行拟合预估的方法,即使用形如式(3)的简谐量来对波动信号进行拟合。

式中,ω是被拟合信号的基频,为已知量;N为拟合所使用的正余弦信号对的个数;a、b分别是某频率正余弦信号所具有的幅值,或者称为拟合过程中该频率的信号所占有的权值,拟合的过程就是对这些权值进行修正的过程。
傅里叶拟合对于被拟合信号频带处在拟合分量所包括的频带内的情况具有很好的拟合效果,能够对各频率成分所具有的权值进行有效的辨识;另外,常数拟合项a,可以对(ω,Nω)范围以外的信号进行线性拟合。
2 问题求解
2.1 电动舵机实际指令信号
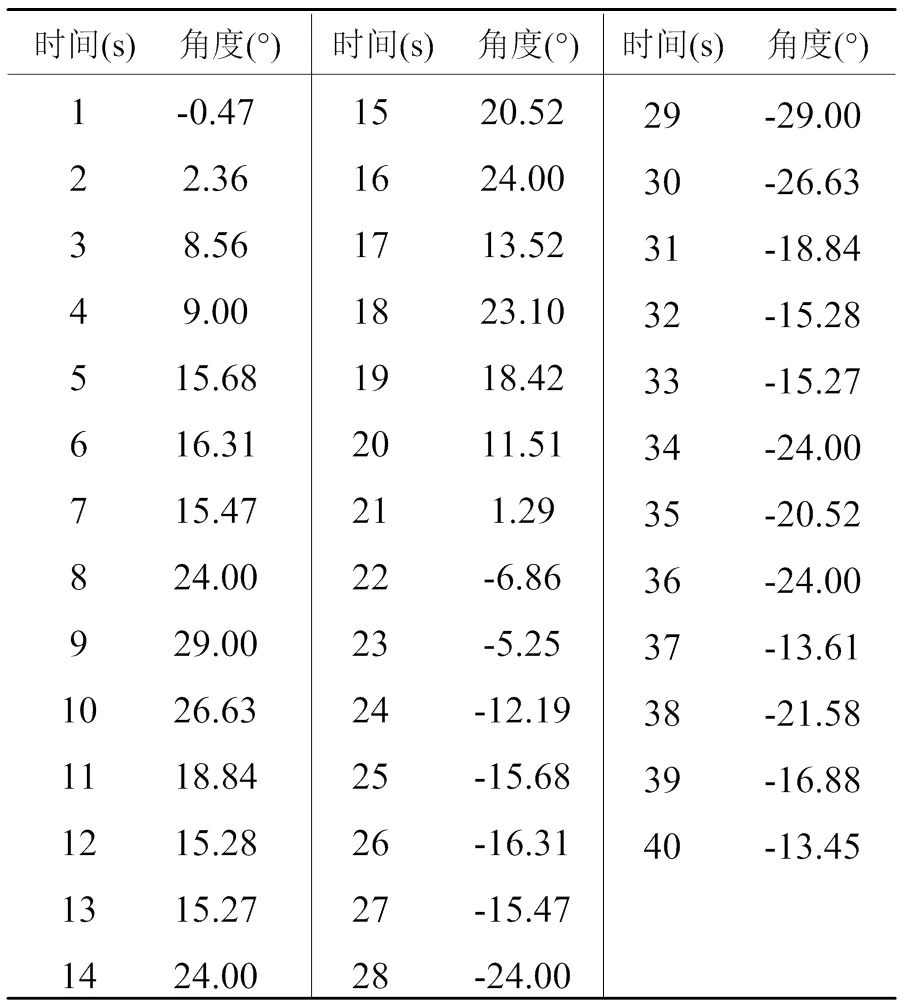
海水的运动一般呈现为周期性波动,水下无人航行器(UUV)的姿态受海水波动情况影响较大,因而水下无人航行器(UUV)电动舵机需要根据自身姿态对舵面进行实时调整,表1所示则为外场实验中得到的水下无人航行器(UUV)电动舵机指令信号段,图1所示为则为该指令信号段的波形。
表1 电动舵机实际指令信号
2.2 电动舵机测试指令的拟合
为获得更贴近实际电动舵机控制指令的测试指令,本文根据外场试验中得到的电动舵机实际指令信号段,结合最小二乘法及傅立叶拟合原理来生成无人航行器电动舵机测试指令信号,图2所示即为根据实际指令信号段拟合得到的一组拟合曲线,其中曲线为电动舵机实际指令信号段波形,N1~N13为13条以所使用的正余弦信号对的个数N进行命名的傅立叶拟合曲线,N13则表示使用了13对正余弦信号的傅立叶拟合曲线。
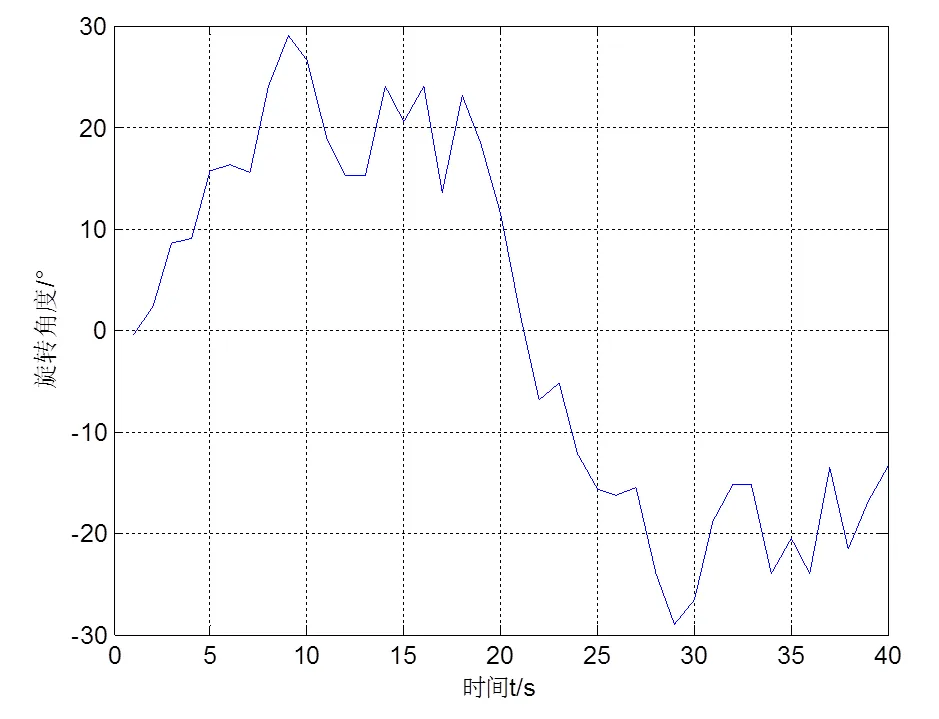
图1 UUV电动舵机指令信号段波形
对于图2所示根据实际指令信号段拟合得到的拟合曲线,本文采用SSE(误差平方和)与R-square(确定系数)对拟合曲线的拟合效果进行量化比较,如图3所示。其中,SSE为误差平方和,用于度量拟合曲线与实际曲线偏差的大小,该指标越小则表示拟合效果越优良;R-square简称为确定系数,用于量化拟合成功的程度,该指标越接近于1表示拟合成功度越高。

图2 UUV电动舵机指令信号段拟合波形
由图3可知,拟合曲线SSE整体上随着所使用的正余弦信号对的个数N的增加而减小,拟合曲线与实际曲线的偏差越来越小,但是误差减小的幅度则是越来越小,正余弦信号对的个数N达到11后,N的增加对SSE的影响甚微;另外,对于拟合曲线确定系数R-square,则是随着所使用的正余弦信号对的个数N的增加而增加,当正余弦信号对的个数N达到10后,确定系数R-square为0.9869,N的增加对R-square的影响已经非常微弱。
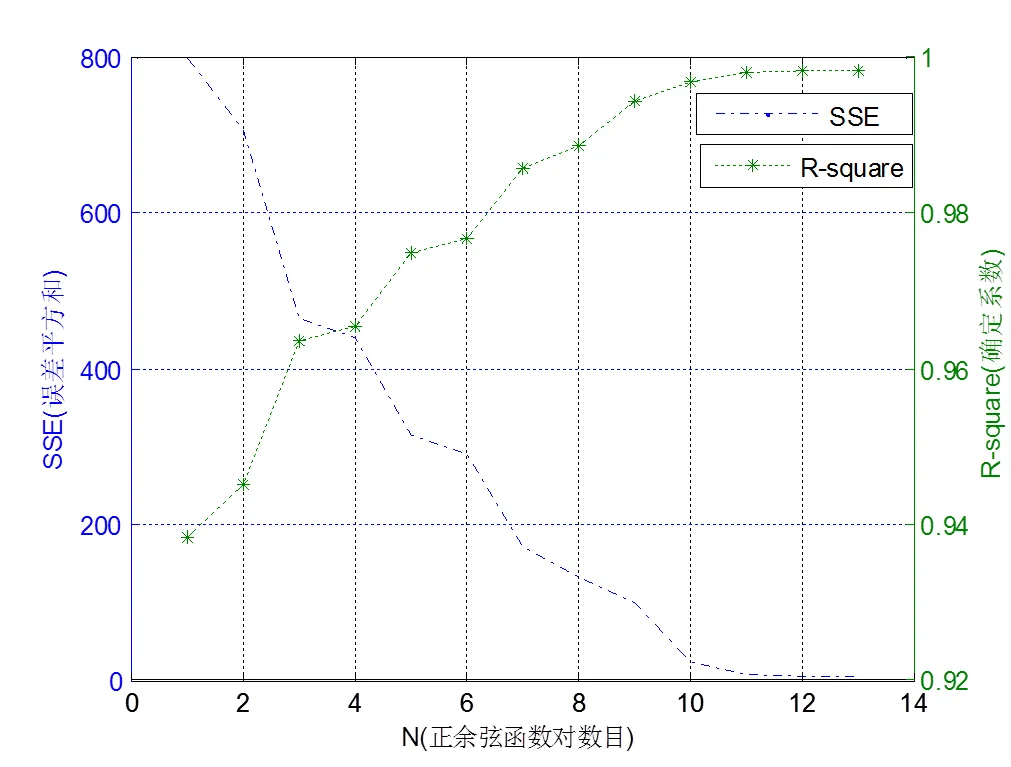
图3 UUV电动舵机指令信号段拟合效果
由上述分析可知,正余弦信号对的个数N对于指令信号段的拟合效果至关重要,但是当正余弦信号对增加至一定数量后,正余弦信号对的个数N对指令信号段拟合效果的影响已经非常微弱;同时,正余弦信号对的个数N的增加意味着拟合曲线复杂程度和计算成本的成倍增加,经过对比权衡,拟合曲线N11具有良好的拟合效果,同时其复杂度及计算成本适中,因此,电动舵机测试指令信号可以采用N=11的拟合曲线。
3 结论
本文运用最小二乘法及傅立叶拟合原理对电动舵机实际指令段进行了13次曲线拟合,经过对比权衡,在优先保证曲线拟合效果的前提下,兼顾拟合曲线的复杂程度和计算成本,获得了贴近实际电动舵机控制指令的测试指令信号,可以充分模拟水下无人航行器(UUV)舵机的工作条件,突破了实际测试中的局限性,使电动舵机性能的研究和测试更具有实际意义。
[1] 高智刚. 可连续旋转电动舵机系统的加载效率测试方法[J]. 测控技术, 2011.
[2] 崔业兵. 舵机电动加载测试系统设计及数值仿真研究[J]. 计算机仿真, 2012.
[3] 章家保. 电动舵机伺服系统的模型辨识及其校[J]正. 光学精密工程, 2008
[4] 刘英. 基于Lab windows/CVI的电动舵机测试设备软件开发[J]. 航空计算技术, 2006.
Build and Application of Electromechanical Actuator Control Signal Based on Least Squares
Zhang Ming
(The 710 Research Institute, CSIC, Yichang 443003, Hubei, China)
TP27U661.33
A
1003-4862(2014)10-0046-03
2014-04-28
张明(1986-),男,工程师,硕士。主要研究方向:水下无人航行器动力系统。
猜你喜欢
疯狂英语·新读写(2021年6期)2021-08-05
自动化学报(2019年6期)2019-07-23
电子制作(2018年1期)2018-04-04
中学生英语(2017年6期)2017-07-31
制造业自动化(2017年2期)2017-03-20
青年歌声(2017年6期)2017-03-13
中学数学杂志(高中版)(2016年6期)2017-03-01
福建中学数学(2016年7期)2016-12-03
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
职业技术(2015年8期)2016-01-05