船用双电枢直流电力推进系统的稳定性研究
2014-05-07 02:16张明武梁星星张鹏
船电技术 2014年10期
张明武,梁星星,张鹏
船用双电枢直流电力推进系统的稳定性研究
张明武,梁星星,张鹏
(武汉船用电力推进装置研究所,武汉 430064)
为了解决船用双电枢直流推进系统的稳定性问题,本文首先介绍一型具体的船舶直流电力推进系统数学模型,对系统模型进行了分析,并确定系统的最佳控制器模式。在计算仿真的基础上,确定控制器的具体参数,通过仿真及系统试验验证了系统的稳定性及控制器参数的合理性。
双电枢 直流电力推进系统 稳定性
0 引言
在某些大功率船用直流电力推进系统中,由于冗余设计与功率匹配的需要,把推进电机设计成共轴结构,即把两台参数基本相同的电机的电枢设计在同一根驱动轴上。这种共轴双电枢结构的直流电力推进系统具有功率大、生命力强、调速范围宽等优点[1],应用于某些重要船舶中。
在某些船舶的电力推进系统中,为了获得较宽范围的调速性能,往往采用多种调速方式的共同作用:一是通过电源配电开关与电枢开关的切换,达到成倍地改变电枢电压来进行在不同的速区内的速度调节。某型船舶的电力推进系统速区组合结构如图1;二是通过电力电子斩波装置连续地改变电枢电压来进行速度调节;三是通过改变电机的励磁电流(磁通)来进行速度调节。同时,为了提高船舶的生存能力及获得较宽范围的调速性能,推进电机的两个电枢可单独运行、串联运行,也可并联运行。电力推进系统在如此复杂的工作模式下,如何保证系统工作稳定性就是一个关键问题。
另外,在实际的系统中,虽然推进电机的两个电枢的基本结构是一致的,但是由于电机本身制造的原因导致电机的气隙尺寸、绕组型式、端接尺寸、漏磁通路径等不可能完全一致,两个电枢在部分特性上存在差异,这种差异致使双电枢串联和并联运行时都存在两个电枢负荷分配不均问题。严重时,使推进电机效率降低,运行不稳定,这也是一个系统稳定性问题。
对于如何解决系统稳定性问题,文献[1]侧重于保证双电枢本身的一致性,并且仅从双电枢并联运行时对励磁电流进行调节来满足稳定性要求这一点进行说明。而文献[2]仅从如何使双电枢负载均衡方面来进行说明,认为稳定性的首要问题是保证双电枢的负载均衡,理想的办法也是通过对励磁电流进行调节来保证负载均衡,从而保证系统运行稳定。实践证明,系统的稳定性问题要更复杂一些,复杂性主要表现为:调速模式的复杂性、负载特性(螺旋浆特性)的复杂性等。在实际的船舶大功率双电枢电力推进系统中,解决系统稳定性问题主要办法是对双电枢的励磁电流进行综合的协调控制,以保证在不同的调速模式及复杂的负载工况下系统的稳定性。本文侧重于励磁电流的控制器本身参数的设计,通过对控制器参数的设计保证系统的稳定性。
2 系统的数学模型
系统的数学模型是一个双电枢、双闭环的控制模型,双电枢为共轴的前电枢、后电枢结构,双环为速度环(外环)、电流环(内环)结构。对模型的要求:可以在任意单、双电枢及系统电源组合下,系统可以稳定工作于双环(速度环+电流环)或单环(电流环)状态。
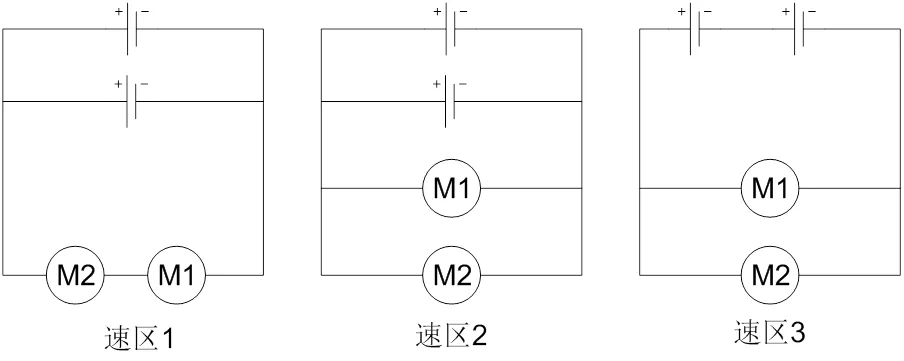
图1 速区组合结构图
系统的数学模型如图2。
系统模型中,双电枢的电流环是单独设计的,可以在没有速度环参与下单独工作,前、后枢电流环可以单独工作,也可以并联工作。
在设计时,我们选定一个典型工况进行控制器参数整定。同时为了分析计算的方便,我们选择已有的某型船舶的电力推进系统进行具体的数值计算,以验证分析研究的可行性。
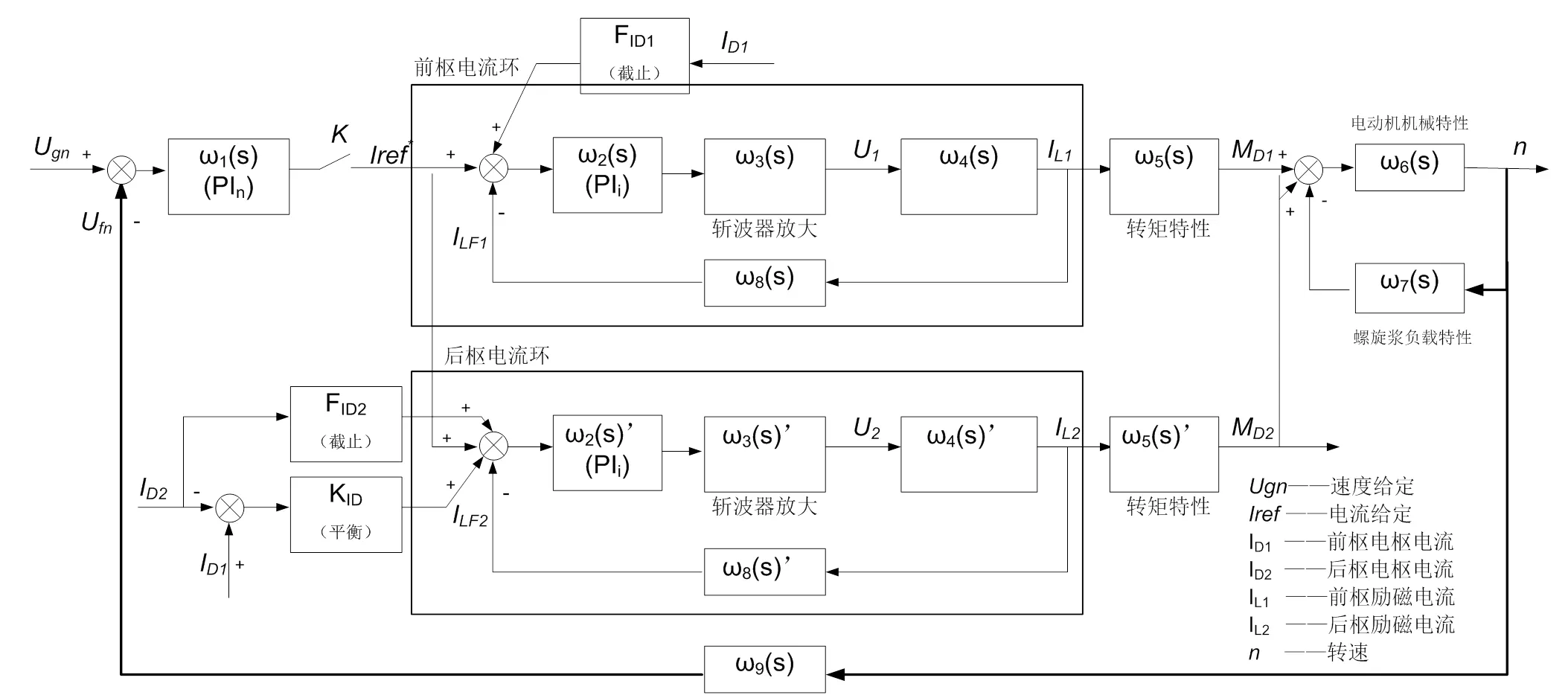
图2 系统模型
2.1 电流环数学模型
前枢电流数学模型(传递函数):

其中:
2()为电流环节的校正器,在这里设计成PI结构;



后枢电流数学模型与前枢电流数学模型是基本相同的,唯一不同的是为了考虑到负载均衡问题而在后枢模型的输入端加入了前后枢的电流差值模型,其作用是保证双电枢同时工作时的负载均衡。
2.2 速度环数学模型

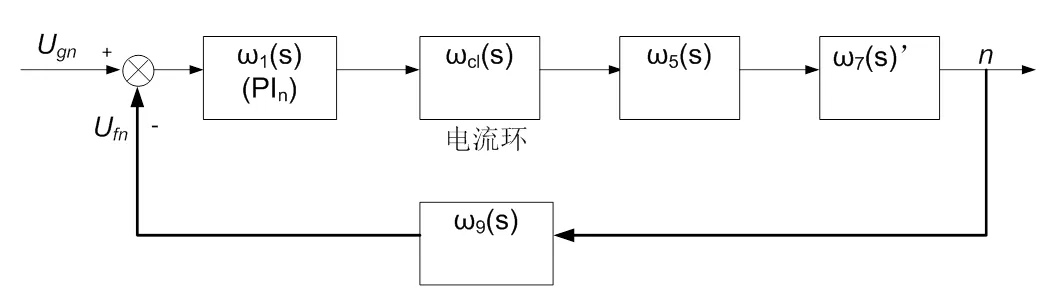
图3 速度环数学模型


2.3 系统模型的其他考虑
前面已经说明,为了保证双电枢的负载均衡,在后电枢的励磁电流环中加入了电枢电流的差值模型ID。同时为了抑制在某些不正常的工况下出现过大的电枢电流,在系统模型的前后励磁电流环中加入了电枢电流的截止模型ID1和ID2。
3 系统的稳定性分析、设计
3.1 系统电流环节的稳定性设计
根据前面叙述,电流环对象模型为:

电流环校正环节2()选择为PI控制器,使基于电流环的单位反馈系统(开环系统)校正为一个II型系统,使阶跃给定信号下的稳态误差(静差)为0。令PI控制器为:
按三阶工程最佳设计方法[4]设计电流PI控制器的参数:
电流环开环模型,为II型系统:

等效单位反馈下的电流环节的闭环模型:

即把电流环节(开环模型)校正成典型二阶环节,对闭环模型进行仿真计算,其相角裕量为70.9°,显然,单闭环系统是稳定的。
为了系统综合方便,把电流环节传递函数作降阶处理,近似等效为一惯性环节[3]:
因此,电流环节的闭环模型:
3.2 速度环节的稳定性设计
按三阶工程最佳设计方法设计速度PI控制器的参数:

系统的速度闭环传函为:

对上式的特征方程进行求根,所有根均具有负实部。对速度闭环模型进行仿真计算,仿真结果如图4,其相角裕量为49.1°,因而速度闭环系统是较好稳定的。
4 试验验证
上述控制器参数是在典型工况下整定的,在其它工况下对参数进行了核算,核算的结果表明系统是稳定的。以上述分析计算的参数作为参考,对励磁电流调节的控制器进行了整定,该系统已在某型船舶上进行了应用,在不同试验条件下,如陆上联调试验、系泊试验、实际的航行试验等不同工况下进行了严格的试验考核,试验结果证明系统是稳定的。图5是陆上联调试验时的低速、中速、高速启动与运行的转速波形。

图5 陆上联调工况下的转速波形
5 结束语
在电机拖动系统理论中,直流电力推进系统是理论及应用上比较成熟的系统,但是大功率双电枢直流电力推进系统由于其应用的特殊性,在实践中还是遇到稳定性等问题。本文主要通过对系统模型的分析,把问题的解决方法集中到励磁电流控制器的设计上,通过理论与试验验证,证明此方法是可行的。
[1] 董国保, 王宗亮. 推进电机双电枢负荷均衡方法研究. 电机技术, 2009(2).
[2] 胡国葆. 双电枢他励直流电动机两电枢回路并联稳定运行的理论分析. 船电技术, 2001(4).
[3] 熊健, 张凯, 陈坚. PWM 整流器的控制器工程化设计方法. 电工电能新技术, 2002(7).
[4] 胡寿松.自动控制原理. 北京: 科学出版社(第五版), 2007.
Research of the Steadiness of Ship Double Armatures DC Electric Propulsion System
Zhang Mingwu, Liang Xingxing, Zhang Peng
(Wuhan Institute of Marine Electric Propulsion, Wuhan 430064, China)
TP273U664.14
A
1003-4862(2014)10-0025-04
2014-03-03
张明武(1967-),男,高级工程师。研究方向:电力电子应用技术。
猜你喜欢
弹道学报(2022年3期)2022-10-08
大电机技术(2022年3期)2022-08-06
火力与指挥控制(2022年5期)2022-07-25
河北电力技术(2021年2期)2021-07-29
弹箭与制导学报(2020年1期)2020-07-09
弹箭与制导学报(2019年6期)2019-06-24
电子制作(2018年1期)2018-04-04
黑龙江电力(2017年1期)2017-05-17
环境科技(2016年5期)2016-11-10
电测与仪表(2016年23期)2016-04-12