
智能投币机在城市公交上使用的改进分析
2014-04-13 08:46顾玉萍
江苏工程职业技术学院学报 2014年3期
顾玉萍,王 慧
(南通航运职业技术学院,南通 226010)
自1993年广州公交在202专线上率先实行无人售票以来,无人售票公交车就日渐成为城市公共交通的主流,可带来便捷的同时也产生了假币尤其是假硬币的困扰,这使公交公司蒙受了不少经济损失。随着智能技术的发展,近些年来,公交车上安装能辨别假币并附带多种功能的智能投币机已成为趋势。
1 现有智能投币机的工作原理
目前常见的智能投币机辨别真假币的原理是,在币道一侧或两侧设置电感线圈做传感器,在传感器线圈产生的电磁场作用下,检测出硬币通过时传感器线圈参数的变化,再通过相应的电路转化成可测量的电流或电压信号传给单片机,根据该信号与单片机中存储的信号比较来确定硬币的真假。其中,辨别硬币真假的核心部件是电涡流传感器,电涡流传感器就是利用电涡流效应工作的,当金属导体置于由线圈通以高频电流产生的交变磁场中或在磁场中做切割磁力线运动时,金属导体表面就会产生路径闭合的呈漩涡状的感应电流,这一现象称为电涡流效应。涡流产生一个与方向相反的交变磁场,削弱线圈的磁场,使线圈的等效电感或等效阻抗发生变化。这些参数的变化与被测导体的电阻率、磁导率、几何形状与表面状况、线圈的几何参数、激磁电流频率以及线圈与导体间的距离等参数有关。由于它结构简单,灵敏度高,频响范围宽,不受油污等介质影响,并能进行非接触测量,得到了广泛应用。
电涡流传感器的电磁过程复杂,很难定量分析。一般根据实际情况建立一个简化模型,将被测金属导体上形成的电涡流等效成一个短路环中的电流。这样将传感器线圈与被测导体等效为一对互感,互感系数用M表示。其等效电路如图1,设R1和L1为传感器线圈的损耗电阻和电感,R2和L2为金属导体的等效损耗电阻和电感。
根据基尔霍夫定律,得方程为 R1I1+jωL1I1-jωMI2=U1-jωMI1+R2I2+ jωL2I2=0,解得:

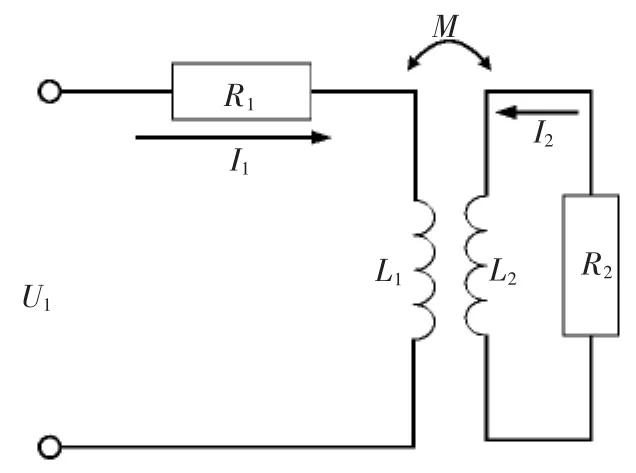
图1 电涡流传感器等效电路
2 鱼骨图分析与应用
当智能投币机安装上公交车投入使用时,其真假辨别率比在平地上使用低一到两个百分点。为了找出原因,采用鱼骨图对其进行分析。鱼骨图又叫因果图、石川图,由日本管理大师石川馨先生发明,是一种发现问题“根本原因”的分析方法,它可以协助找出引起问题 (最终问题陈述所描述的问题)潜在的根本原因。其特点是简捷实用,深入直观。它看上去有些像鱼骨,问题或缺陷(即后果)标在“鱼头”外。在鱼骨上长出鱼刺,上面按出现机会多寡列出产生问题的可能原因,有助于说明各个原因之间如何相互影响。鱼骨图在工厂矿企业进行生产管理分析和原因分析及改善措施上有着极其广泛的应用,是非常实用的方法。智能投币机在公交车上使用时识别率偏低的根本外部原因在于:与平地上相比,公交车上智能投币机使用时,车辆通常处于发动状态,车辆在震动;乘客上下车,车辆会晃动,因此智能投币机在公交车上使用的环境比平地上恶劣。
将外部原因归纳到智能投币机上时主要有以下两点:① 硬币相对线圈歪斜,可以归纳为硬币通过感应线圈处币道时有时会偏向一侧或倾斜,导致硬币识别器误判。②乘客投币的用力不同,乘客投币高度不同,都可以归纳为投币的初始速度不一样。这会使得硬币经过传感器线圈时的速度不同,导致硬币识别器的误判。针对智能投币机识别率中存在的问题点,选择层别方法,画出鱼骨图框架,确立讨论的目标,采用层次分析获取相关层次和相关原因,如图2。
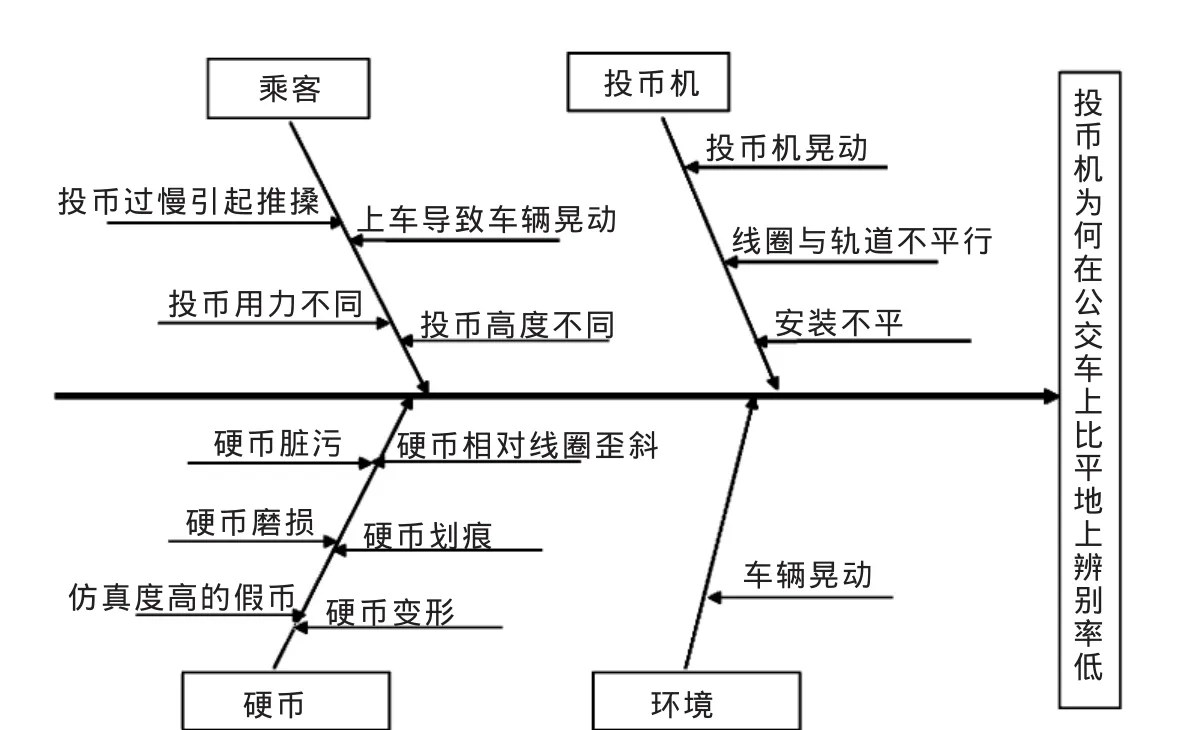
图2鱼骨图——智能投币机识别率偏低原因
3 智能投币机识别率偏低原因分析
3.1 硬币通过传感器线圈时歪斜
因为币道的宽度大于硬币厚度,而公交车即使在停车等待乘客上车时也会有震动,导致所有硬币经过感应线圈时与感应线圈的距离不一定一致,也不一定是正对着线圈。根据上面分析,电感L与被测导体的电导率ρ、磁导率μ、线圈的激励频率f以及传感器与被测导体的距离d有关,线圈的激励频率f在电路定下来时就已经确定,当被测导体与传感器线圈的距离d保持定值时,才能保证电感L完全反映被测导体的电导率ρ、磁导率μ。因此硬币偏向一侧或倾斜都会使得与传感器线圈间的距离d不是定值,影响到电感L,导致测量得到的数据不能正确反映硬币的真实情况,给硬币真假的辨别造成偏差。
3.2 硬币经线圈时速度不同
现有的投币机计算频率的方法大体是这样的,单片机中一个计时器T0用于中断开始后脉冲计数的定时,计数器T1记录这段时间内的脉冲个数,根据脉冲总数与预设值比较,判断硬币的真假。
币道是一个斜坡,硬币滚动时有一个加速度,详见图3。根据加速度位移公式S=v0t+0.5(g cos δ-a)t2,其中g为重力加速度,a是币道阻碍硬币运动的摩擦力f引起的加速度,对于同种硬币来说,a是定值,跟币道粗糙度、硬币材质和硬币重量有关,δ是g和-a之间的夹角,t是累计频率的时间,在单片机程序中设定,是定值,硬币在时间t内滚过的路程设为S。
假设单片机计时器T0从t1开始计时,到t2结束,到t1已经过的路程S1=v0t1+0.5(g cos δ-a)t12,到 t2时经过的路程 S2=v0t2+0.5(g cos δ-a)t22,在中断时间内的路程 ΔS=S2-S1=v0(t2-t1)+0.5(g cos δ-a)(t2+t1)(t2-t1)。 可以看出,当t1、t2、δ、a都是定值时,ΔS只与v0的大小有关,硬币以不同的初速v0在同样的时间内到达相对传感器线圈的位置不一样。在实际应用中,以一元硬币为例,它是一个直径25 mm的金属圆片,不同的部分它的物理性质、尺寸、形状、电导率、磁导率都不一样。在初速不同时,同样的时间硬币相对于传感器线圈的位置不一样,即硬币的特征不一样,反映到传感器线圈上电感就不一样,振荡电路频率的变化就不一样。因此,在硬币的不同位置传感器得到的特征脉冲数不一样,这就导致了硬币识别器的误判。理论分析时,视被测导体为无限大平面,实际上以一元硬币为例,它只是一个直径25 mm的圆面,因此,在硬币的不同位置传感器得到的特征脉冲数是不一样的,这就导致了硬币识别器的误判。由此,需要解决硬币通过传感器线圈时倾斜和硬币经线圈时速度不同(初速不同)两个问题。
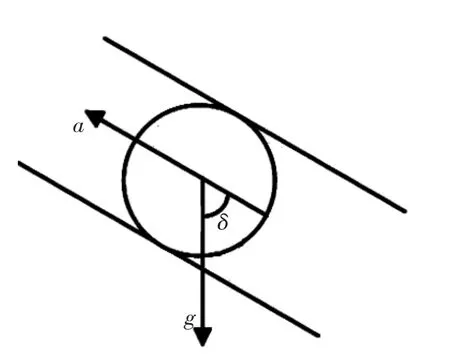
图3 硬币在币道中滚动示意图
4 提高智能投币机识别率的方法
4.1 现有改进方法
针对智能投币机的改进,现有方法主要有两种:一种是通过在软件中采用速度加权算法对初速进行控制。系统通过中断的方式将统计脉冲的时间细分成很多个时间段,对每个时间段都计算权值,算出经过速度加权的脉冲数,并对实时数据进行处理后得到加权平均频率,再和存储的各特征频率比较,判断硬币的真伪。该方法增加了程序的复杂程度、阅读难度和内存的开销,无法同时对硬币倾斜进行控制[2]。第二种是通过增加硬币传动装置对硬币倾斜和初速同时控制。如一套能带动所有硬币以相同速度经过硬币识别模块的硬币传动装置,它由支撑板、滚筒和驱动装置组成,支撑板上设置弧形的硬币轨道,滚筒上设有绕滚筒圆周均匀间隔设置的凸起,相邻凸起构成硬币容纳槽。滚筒旋转带动所有硬币以相同的速度经过硬币识别模块的硬币通道,硬币与硬币识别模块的传感器线圈正对,其设备结构相当复杂[3]。
4.2 改进措施
为取得相对简单实用的方法来提高智能投币机的识别率,确定增加硬币预处理部分的方案对硬币倾斜和初速同时控制。有两套方案可供选择使用:
1)采用设定的时间内,硬币相对传感器线圈的位置保持不变的方法来测量。硬币在设定时间内相对传感器线圈的位置固定,如果使硬币通过传感器线圈时速度为0,即能够得到稳定的测量值,与现有方法相比,测量结果更加精确。它采用特制的塑料叶轮——闭式五角叶轮,增加硬币预处理部分,它有5个叶片,每相邻两叶片夹角为72度,两叶片间为纳币腔,用于容纳从投币口投入的硬币。详见图4。
采用闭式五角叶轮,接纳投入的硬币并使之保持静止状态,光眼电路探测到投入的硬币,启动计时器计时,位于硬币两侧的电磁传感器探测硬币特征,并将其转换成电感L的变化,并通过振荡电路转化成振荡频率f反馈给单片机。计时时间到后,单片机中计数器记录这段时间内的脉冲个数,根据脉冲总数与预设值比较,判断硬币的真假。同时步进电机带动闭式五角叶轮向左旋转72度,将硬币放入币道,并将下一个纳币腔对准投币口,接纳下一个投币。
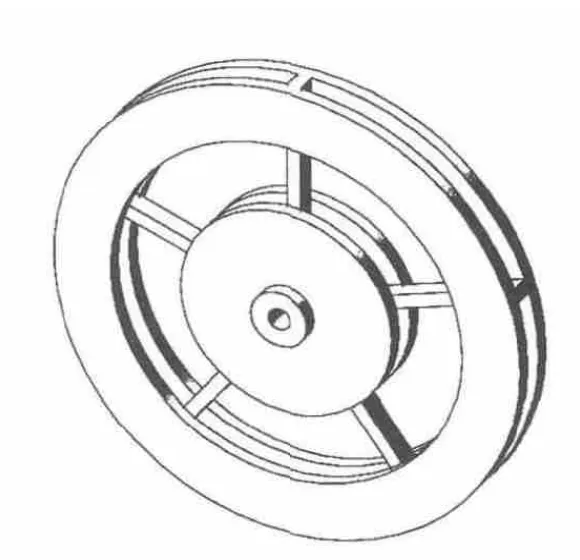
图4 闭式五角叶轮
2)增加硬币预处理部分并改变硬币轨道,对硬币倾斜和初速同时控制。硬币预处理部分由直流电机及两根橡胶辊组成,一根橡胶辊与直流电机相连,随直流电机以恒定转速转动,另一个起从动作用,两橡胶辊之间距离微小于一元硬币厚度。硬币轨道呈扁平状,使硬币只能紧贴币道内壁下滑。硬币从投币口掉落后,沿币道内侧轨道壁下滑,至两橡胶辊处被夹住,并从直流电机带动的橡胶辊上得到恒定的速度。硬币预处理部分可确保所有硬币经过硬币识别部分时速度一致。
[1] 郭玉,李彦梅,王鹏.基于电涡流传感器的硬币辨伪系统的设计[J].传感技术学报,2012(4):557-559.
[2] 朱晓乾.高准确率硬币鉴别装置的设计与实现[D].上海交通大学,2008:41.
[3] 龙涛.硬币处理装置及其处理机:201120572147X[Z].上海清涵电子科技有限公司.
猜你喜欢
装备制造技术(2020年11期)2021-01-26
保健医苑(2019年2期)2019-04-03
环球时报(2019-03-27)2019-03-27
通信电源技术(2018年5期)2018-08-23
诗潮(2018年3期)2018-03-26
做人与处世(2018年24期)2018-02-12
工友(2016年4期)2016-09-18
启迪与智慧·教育版(2016年2期)2016-04-05
汽车科技(2014年6期)2014-03-11
组合机床与自动化加工技术(2014年10期)2014-03-01
