
四模混合动力汽车控制器硬件在环系统设计
2014-04-11 06:06胡艳青
车用发动机 2014年4期
陈 亮,朱 浩,杨 林,闫 斌,胡艳青,鄢 挺
(1.湖南大学,湖南 长 沙 410082;2.上海交通大学汽车电子技术研究所,上海 200240)
为适应汽车节能减排的要求,混合动力汽车技术在全球得到了快速发展。相对于传统内燃机,混合动力系统不仅包含发动机,还包含有电机、动力电池、机电耦合传动等子系统[1],是一种典型的多能源系统,其控制比传统内燃机复杂很多。传统道路测试费用高、周期长,测试安全性难以保证,难以实现某些极限条件下的测试[2-3]。因此,有必要采用基于硬件在环仿真(HIL)测试系统的混合动力控制器开发、测试流程,其中的关键技术是HIL系统的架构与模型。
对于现有成熟的混合动力系统,由于其机电耦合模式方面的不足,节能减排的实际表现大多还难以达到人们期望的水平。为此,本研究拟针对一种新型的四模混合动力系统,进行混合动力控制器(Hybrid Control Unit,HCU)硬件在环仿真测试系统研究,并通过对HCU的控制策略测试,验证该HIL系统的有效性。
1 四模混合动力系统
本研究的四模混合动力系统为典型的混联式混合动力系统构型(见图1),其中包括发动机ICE、电控离合器C、电动/发电机MG1、行星齿轮系、2个挡位的耦合箱齿轮传动系 Gear-Box、电动/发电机MG2、后桥速比Fd及输出轴Out-shaft。通过对Gear-Box和离合器的控制,可以实现单电机纯电驱动、双电机纯电驱动、串联驱动和混联驱动等4种驱动模式。通过对MG2电机转速的控制,利用行星齿轮系的工作原理,可实现无级变速控制。因此,该系统对城市客车、城际客车都具有显著的节油效果,不仅可用作动力电池电量维持型的常规混合动力汽车,还可用于插电混合动力汽车。前期的仿真研究表明,基于该系统的电量维持型客车,按城市公交工况运行的节油率可达35%以上,按高速公路工况运行的节油率也可达20%以上。
2 硬件在环测试系统架构及功能
HIL系统的主要功能要求:
1)能对控制策略进行验证和优化;
2)能用于控制器软硬件调试和测试;
3)能用于控制参数标定;
4)能用于故障模拟和OBD测试;
5)能用于整车运行工况模拟测试与能耗、排放、动力性等性能仿真测试;
6)能进行传感器、执行器模拟和CAN通信测试;
7)结果自动保存和测试报表自动生成。
图2示出所设计的HIL系统架构,包括宿主机、目标机、HIL处理器、接口系统、待测控制器等。宿主机建立的监测系统可对HIL模型中的重要参数进行实时监测或对已标定好的参数进行优化标定;目标机用于存放HIL模型、实时代码转换与下载。为便于模型开发和系统架构验证,HIL处理器采用了AutoBox中的DS1006处理器板进行系统模型实时仿真运行,DS2202CAN、AD与DA接口完成数字信号和模拟信号的交互。特别地,为了克服现有大多HIL系统由于缺乏执行器模拟功能而不能满足对控制器硬件可靠性、动态响应特性测试要求的问题,本研究设计了执行器等效电路模拟器,主要包括电控离合器执行器、换挡机构执行器、电机和发动机热管理执行器。
3 HIL模型
为了能给整车控制器(HCU)提供更加真实的测试环境,本研究测试系统通过 Matlab/Simulink软件建立实时仿真模型来模拟包括驾驶员在内的整车真实部件。各模型的输入输出参数分别代表着驾驶员的驾驶习惯及整车在实际环境中各部件的运行状态。整车HIL模型包括驾驶员模型、发动机模型、电机模型、电池模型、附件功率模型以及以行星齿轮系为核心的机电耦合动力传动模型等。
3.1 驾驶员模型
为了自动跟随测试动态工况,驾驶员模型主要由一个PID控制器组成(见图3)。以目标车速与实际车速作为输入量,驾驶员踏板(油门踏板或制动踏板)开度为输出量:
式中:PAcc/Brk为驾驶员模型产生的油门或制动踏板开度;P,I,D为PID调节器中比例项、积分项及微分项系数;ΔV,VActual,VDmnd分别为车速偏差、实际车速以及目标车速。
3.2 发动机模型
考虑到真实发动机及其燃烧过程的复杂性以及混合动力系统控制中对发动机的瞬态抑制,本研究对发动机模型进行了简化,如图4所示。以试验计算得到的发动机外特性、万有特性、起动油耗、拖转扭矩等数据建立表格,通过一维或二维插值方法来获取发动机油门控制、转速控制、转矩控制等不同控制模式下发动机的运行状态参数、燃油消耗率。在转速控制模式下,通过整车控制器的指令转速与发动机当前实际转速的转速闭环调节输出发动机当前实际扭矩,同时通过发动机当前转速与实际扭矩的二维插值查表得到发动机的燃油消耗率。
3.3 排放模型
对于混合动力汽车而言,尾气排放也是衡量混合动力汽车性能的重要指标。本研究的硬件在环测试系统增添了一个车辆排放模型,以便在仿真测试时对控制策略进行优化以减少尾气排放。由于基于燃烧模型、排放模型和催化器催化反应理论的模型难以满足HIL系统的实时性要求,因此本研究基于试验数据,以二维插值的方式得到尾气排放量(见图5),其输入为发动机模型输出的扭矩与转速。
3.4 电机模型
电机模型的输入主要包括来自HCU的指令、电机的当前转速及电机输入电压。其中,来自HCU的指令包括电机的控制状态指令、转速指令和扭矩指令。电机模型的输出主要包括电机实际扭矩、电机直流母线电流等。其中,按电动模式运行时电机模型输出的扭矩为正,按发电模式运行时电机扭矩为负。所建立的电机模型见图6。电机扭矩TMG、转速ωMG、ηMG、电机需求功率PMGE、电机电流IMG、电压VMG满足如下关系:
3.5 电池模型
混合动力客车中的动力电池主要用于驱动电机、在整车制动过程中回收能量以及给车载空调、空气电泵等电力附件提供能量。动力电池的充放电过程是一个受温度、电流、电压等多参数影响的化学反应过程[4],该过程具有很强的非线性度和时变特性,实际中通过电池理论模型难以准确地模拟电池的充放电特性。本研究中的电池模型采用的是电池的等效电路模型(见图7)。
简化后的电池模型可视为由一个理想开路电压源与一个内阻组成的系统[5-6],两者均受电池SOC与温度的影响。硬件在环测试系统中电池模型主要用于模拟实际电池系统在满足当前电机功率需求前提下,计算出电池荷电状态值BP_SOC、电池温度BP_Temp、最大充放电功率 Pmax_ch、Pmax_dis以及电池电压BP_V。BP_SOC的计算公式为式中:SOCinit是电池SOC初始值;C为电池容量,ISOC为电池电流。
3.6 机电耦合动力传动与整车动力学模型
为满足不同混合动力系统构型的需要,HIL系统中,机电耦合动力传动模型设计有几种典型的构型供选用,同时也可通过二次开发界面建立新系统模型。图1所示的四模系统采用以行星齿轮系[7](见图8)为主的机电耦合机构:
式中:ωs为太阳轮转速;ωr为外齿圈转速;ωc为行星架转速;R,S分别为外齿圈和太阳轮的半径。
根据图1,当离合器分离时行星轮系的外齿圈只与MG1相连,可实现整车的纯电驱动,驱动能量全部由动力电池系统提供;当离合器结合时发动机和MG1均与外齿圈相联,发动机的输出功率除了用于驱动车辆外,还可通过MG1对动力电池组进行充电。整个行星齿轮系的太阳轮与MG2相连,行星架则与整车驱动轴相连。
以离合器结合为例,围绕行星轮系建立的动力学方程如下:
式中:ωMG2′,ωr′,ω′c分别为 MG2、外齿圈及行星架的角加速度;JMG2,JMG1,Je,Jr,Jc为 MG2、MG1、发动机、外齿圈以及行星架各自的转动惯量;TMG2,TMG1,Te,TBrake分别为 MG2、MG1、发动机产生的扭矩以及整车制动产生的制动扭矩;F为行星轮系中产生的内力;rtire为轮胎半径;ρ为空气密度;A为迎风面积;Cd为空气阻力系数;fd为整车后桥传动比;f为轮胎滚动阻力系数。式(4)~式(6)的矩阵形式表达为
4 人机交互系统
人机交互系统作为混合动力整车控制器硬件在环仿真测试的重要环节,不但可与实时程序进行数据交换、实时曲线跟踪、实时数据(如发动机、电机转速)记录,还能满足测试者对重要标定参数反复的调节和修正[8]。其中,标定功能基于CCP协议。用于HCU控制策略测试的监控界面见图9。基于该监控界面,可以设置参数、注入故障,选择实现所设计的各项功能,还可以通过在线或离线的方式对试验结果进行分析,功能齐全,容易维护,具有良好的扩展性和可移植性。
5 测试验证与结果分析
本研究以用于城市公交客车(见表1)的四模混合动力系统控制器为对象,测试验证了硬件在环测试系统的各种功能。
对于车辆行驶工况模拟测试,HIL系统可以通过监控界面输入任意待测工况。图10示出典型城市公交工况的测试情况,仿真步长设置为0.001s。实际车速很好地跟随了目标车速,在整个循环工况中的车速跟随误差仅1%~5%。这说明被测HCU的动力控制策略是正确的,也验证了本研究HIL系统的驾驶员模型具有较高精度。
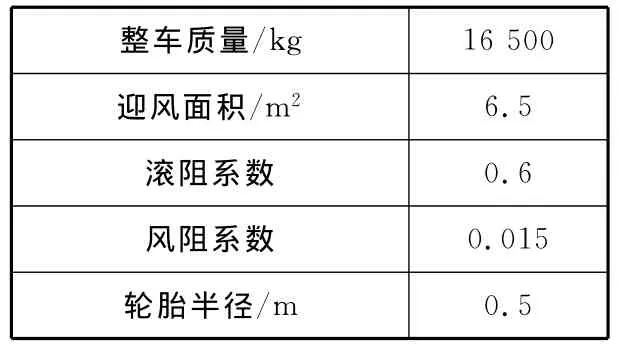
表1 车辆参数
图11示出动力电池SOC和发动机、MG1电机、MG2电机的转速、转矩以及机电耦合机构挡位变化历程。由图可见:被测HCU能将SOC控制在设定窗口内;能准确控制自动换挡,在车辆低速与起步时主要采用1挡,高速时主要采用2挡;能合理分配控制发动机、2个电机的扭矩和转速,能实现有效的制动能量回收控制、四种驱动模式控制、自动起停控制等控制功能;发动机转速处于高效运行区间,即能正确实现无级变速控制功能。验证结果表明,HCU能量控制策略是正确、可靠的,与实际系统的台架模拟测试结果相当,也验证了HIL系统模型具有较高精度。
6 结束语
本研究所设计的四模混合动力汽车控制器硬件在环仿真测试HIL系统,将传感器和执行器实际模拟与模型模拟相结合,不仅可用于控制策略研究,还可用于控制器软硬件功能性能和可靠性测试、参数标定、故障模拟和OBD测试、传感器和执行器模拟、CAN通信测试及整车工况模拟与能耗、排放等性能分析。通过对被测HCU的硬件在环仿真测试,表明HIL系统准确可靠地实现了所设计的功能,满足控制器在环测试的实时性要求,具有较高的精度。
HIL系统虽以四模混合动力系统控制器为对象进行设计和测试验证,但系统架构确保了该HIL也可用于其他各类混合动力系统控制器的HIL测试。下一步,将通过采用自主开发的HIL ECU和接口系统硬件降低系统成本,以促进系统的推广应用。
[1] 叶 明,舒 红,刘永刚.插电式混合动力汽车硬件在环测试[J].重庆大学学报,2012(3):8-13,19.
[2] 吕 峰,欧增开.整车电控系统硬件在环测试技术研究[J].汽车电器,2013(7):60-62.
[3] 刘志茹,王庆年,曾小华.HEV控制器硬件在环仿真平台的研究与开发[J].汽车技术,2006(3):22-25.
[4] 李宏才,王伟达,韩立金,等.混联式混合动力控制系统硬件在环仿真平台设计与应用[J].公路交通科技,2011(4):130-135.
[5] Rizzoni G,Guezennec Y,Brahma A,et al.VP-SIM:a unified approach to energy and power flow modeling simulation and analysis of hybrid vehicles[C].SAE Paper 2000-01-1565.
[6] 刘胜铁.并联混合动力客车模糊控制策略的研究[D].长春:吉林大学,2006.
[7] Abe S.Development of the hybrid vehicle and its future expectation[C].SAE Paper 2000-01-C042.
[8] 张 恒.纯电动汽车整车控制器硬件在环仿真系统的研究[D].长春:吉林大学,2013.
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年12期)2022-07-05
防爆电机(2022年3期)2022-06-17
煤气与热力(2021年12期)2022-01-19
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
电子制作(2019年9期)2019-05-30
汽车文摘(2015年12期)2015-12-12
