
装甲输送车电控气动转向制动操纵技术研究
2014-04-09 09:37李国强王兴野韩玉方
装甲兵工程学院学报 2014年1期
李国强, 王兴野, 韩玉方
(1. 装甲兵工程学院装备试用与培训大队, 北京 100072; 2. 装甲兵工程学院教练团, 北京 100072)
某型履带式装甲输送车转向、制动操纵装置为机械操纵系统,为实现车辆的自主行驶,必须对其操纵装置进行改造,实现电控操纵。
1 装甲输送车转向、制动操纵装置工作原理
1.1 转向、制动操纵装置结构及组成
某履带式装甲输送车推进系统如图1所示。动力传递:发动机→主离合器→变速箱,在变速箱内部,动力输出分成2路,分别传给左、右转向机,经侧减速器传给左、右主动轮输出。该型装甲车转向、制动装置由转向离合器C1、C2和制动器Z1、Z2组成, 转向、制动操纵装置构造如图2所示。转向离合器和制动器的操纵装置包括手操纵装置和脚操纵装置2部分,其中转向操作由手操纵装置完成,制动操作以脚操纵装置为主。手操纵装置由操纵杆及横轴、纵拉杆、拉杆臂、中间轴、转向倾斜拉杆、转向横轴、操纵钩、三臂杠杆、分离推杆和手操纵制动推杆等组成。脚操纵装置由脚制动器踏板及轴、倾斜推杆、倾斜推杆臂、脚制动器制动横轴、脚制动器制动推杆等组成。

图1 某履带式装甲输送车推进系统
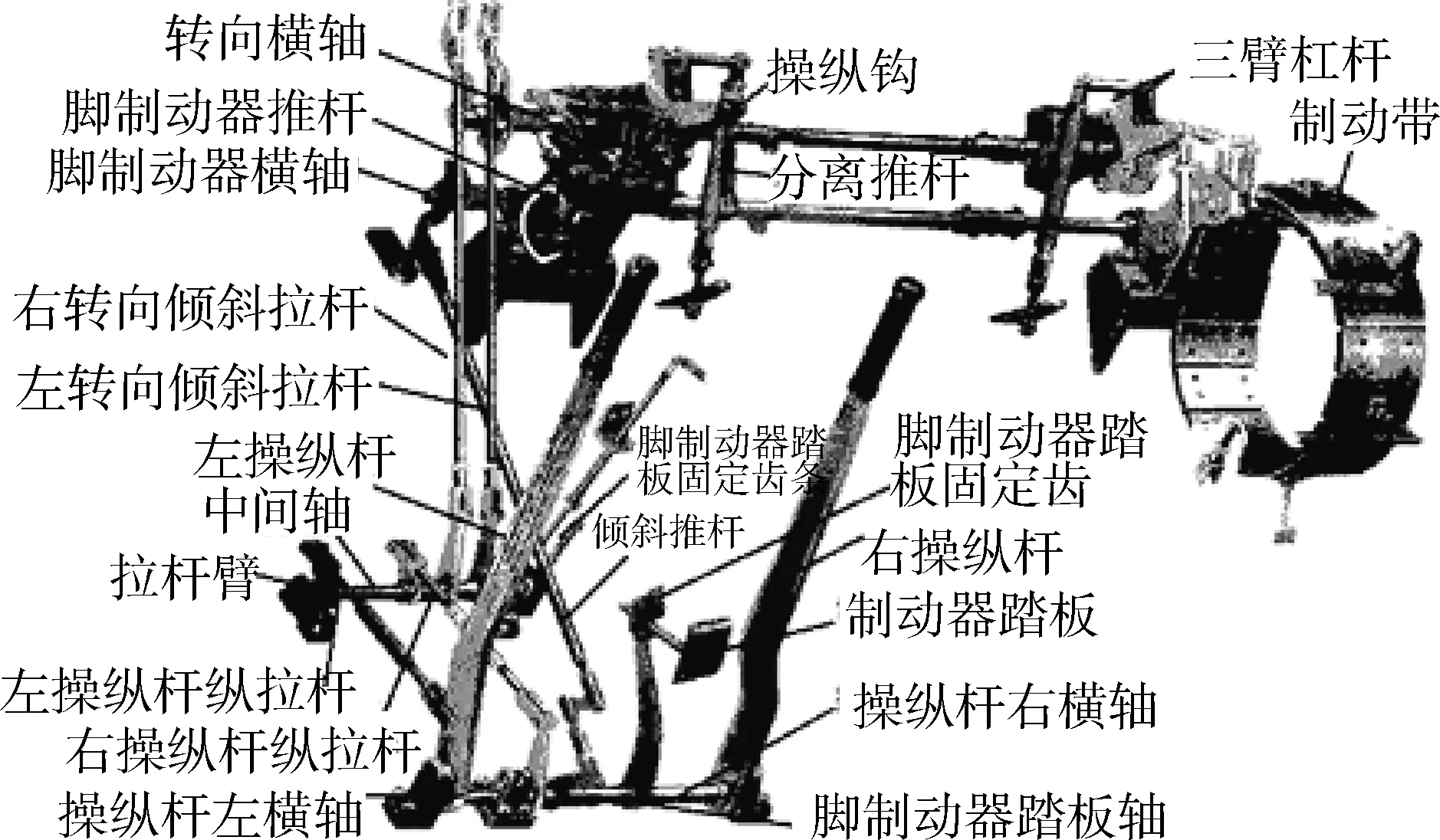
图2 某履带装甲输送车转向、制动操纵装置结构
1.2 转向、制动操纵装置工作过程
车辆直线行驶时,左、右操纵杆在最前位置,两侧转向离合器接合,制动器松开,动力由变速箱经转向离合器传给侧减速器输出。
当车辆转向时,拉一侧操纵杆向后,操纵力经3组四杆机构控制该侧转向离合器、制动器,使转向离合器分离、制动器制动,主动轮输出转矩减小,履带速度降低;另一侧转向机工作和直线行驶状态相同,履带速度不变,由于两侧履带速度不同,车辆向低速侧转向。根据转向离合器、制动器的工作状态不同,车辆的转向分为4种状态:部分分离转向、分离转向、部分制动转向、制动转向。不同转向状态的转向离合器、制动器的工作状态见表1。
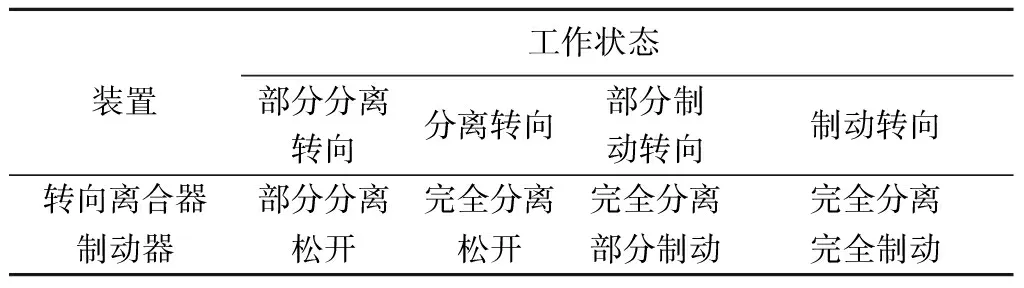
表1 不同转向状态的转向离合器、制动器工作状态
当车辆需要制动时,踏下制动器踏板,制动力通过倾斜拉杆、脚制动器横轴、脚制动器推杆使两侧制动带抱紧制动鼓,制动力大小可根据驾驶员踏制动踏板力的大小进行调节。
2 气动转向、制动操纵装置设计
2.1 装甲车辆转向分析
该型装甲车有4种转向状态,每种转向使用的频度不同。
1) 部分分离转向和分离转向。此时的转向半径与挡位、发动机角加速度、地面阻力大小有关。发动机角加速度越大,转向半径越小;地面阻力越大,转向半径越小。转向离合器在部分分离转向时产生滑磨功,滑磨功大小为

式中:Mc为转向离合器传递的转矩;ω1为主动部分角速度;ω2为被动部分角速度。部分分离转向在松软路面、泥泞地或陡上坡等阻力大的路面上使用效果较好;而在良好路面上行驶时,由于部分分离转向半径过大(一般转向半径在120 m以上),转向效果不明显,加之滑磨功的存在,所以在良好路面上基本不能使用部分分离转向。在气动操纵装置设计中,为简化结构,仅控制转向离合器结合和分离,不对其进行伺服控制。分离转向分为正转向和反转向,转向半径一般在80~120 m,为使正转向效果更加明显,一般采用“减—拉—加”方式操作。“减”,减小油门,降低发动机转速,以获得发动机加速空间;“拉”,迅速拉一侧操纵杆使转向离合器分离;“加”,迅速加油,使高速侧履带加速,实现分离转向。当正转向修正方向未到位时,马上使用反转向,即松开该侧操纵杆,迅速拉另一侧操纵杆使离合器分离并迅速减油,利用发动机制动使履带制动,这时车辆进行反转向,和正转向转动方向一致,使转向持续时间增加,增大转向角度。
2) 部分制动转向。理论上该转向半径比分离转向半径小,但在转向过程存在制动功率,其大小为
NzT=MTωT,
式中:MT为制动转矩;ωT制动鼓角速度。车辆行驶速度越高,制动功率越大,制动功率转化为热能,由制动带吸收,温度升高,出现热衰退效应,导致摩擦因数减小,转向效果下降,因此这种转向不能持续使用。
3) 制动转向。当制动带完全抱死时,制动鼓角速度为0,此时制动功率为0,车辆进行制动转向,理论上转向半径为1/2B(B为履带中心距),制动转向只能在一挡、二挡和倒挡使用,其他排挡不能进行制动转向。
2.2 气动操纵装置的基本要求
气动转向、制动操纵装置设计的原则是:在保持原车推进系统结构不变的前提下,根据原车辆转向制动装置的结构及工作原理,设计气动操纵装置,分别控制闭锁离合器、制动器,完成转向制动操作的控制。其设计要求如下。
1) 工作稳定可靠,满足车辆转向、制动的需求。一方面,气动操纵装置的响应速度和控制精度要满足驾驶员转向、制动的操纵要求;另一方面,要能够进行伺服控制,满足转向和制动时对制动力的调节要求。
2) 要能够适应履带车辆上的剧烈振动和冲击,并能够适应履带车辆恶劣的工作环境。
3) 要结构简单,使用维修方便,占用空间小,便于安装布置。
2.3 气动操纵装置的设计与分析
气动操纵装置的设计要经过论证、选择元件及多次反复,最终完成。
2.3.1 转向离合器气缸直径的确定[1]
气缸推力应满足
(1)
式中:Fc为转向离合器气缸推力;Dc为转向离合器气缸直径;p为系统压力;Fcmax为转向离合器分离所需最大推力。
转向离合器所需最大推力和行程可通过试验或查原单设计说明书得到,通过式(1)可得转向离合器气缸的计算直径。因气缸已系列化生产,则应根据计算结果在系列中选择气缸直径。
2.3.2 制动带气缸直径的确定
装甲车辆制动采用浮式制动带,具有双向助力作用,制动带气缸计算直径为
(2)
式中:Fz为制动带气缸推力;Dz为制动带气缸直径;μ为制动带与制动鼓摩擦因数;α为制动带包角;M为转向离合器传递的转矩;D为制动鼓外径。
根据式(2)得出的制动带气缸计算直径,结合气缸系列选择气缸直径。
2.3.3 制动力的调节
装甲车辆转向、制动时,制动力根据需要能够连续调节,为达到调节制动力的目的,在气动系统中使用比例阀,由比例阀对输入制动带气缸的压力进行调节。比例阀选用带比例线圈的比例减压阀,采用4~20 mA的模拟信号输入,其输入与输出的关系曲线如图3所示。当电流达到的18 mA时,输出压力达到试验设定的最大值,此后电流继续增大,输出压力保持该定值不变。比例阀工作时气压调节有固定的调节范围,所选比例阀的输出气压调节与输出流量关系如图4所示。气动操纵系统设计过程中,应保证当执行机构工作时,其最大流量能够使比例阀输出流量处于水平的直线段,否则系统工作将出现不稳定情况[1]。

图3 比例阀输入与输出关系

图4 比例阀输出压力与输出流量关系
2.3.4 转向、制动的控制
气动转向、制动装置的气路原理如图5所示,工作简图如图6所示。气动操纵装置由转向手柄、制动踏板、制动带气缸、阻尼阀、转向离合器气缸、控制阀组(包括换向阀、比例阀、截止阀)、控制电路、空压机、过滤器、干燥器、储气筒和安全阀等组成。

图5 气动转向、制动装置原理
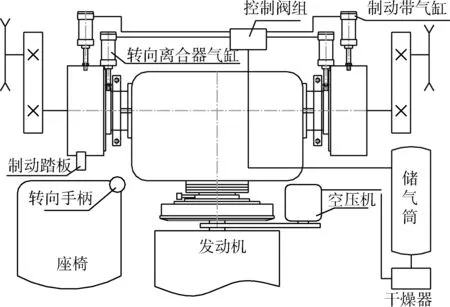
图6 气动操纵装置工作简图
气动转向、制动操纵装置设计为2种模式:人工操纵和自动操纵。气动操纵中转向和制动都需要通过电位计控制比例阀,为满足人工操纵需要,需设计转向手柄和脚制动踏板,因操纵电位计力量非常小,在设计转向手柄和脚制动踏板时,应兼顾能量消耗、操纵精度、操纵速度及获取操纵量的反馈信息,按照最佳操纵力和行程进行设计。
3 气动转向、制动操纵装置工作
发动机工作时,由皮带轮带动空压机工作,高压空气泵出,经过滤、干燥后送入储气筒作为气源使用。当车辆直线行驶时,换向阀S1、S2断电,截止阀S3、S4、S5、S6断电,比例阀没有控制电流,此时左、右转向离合器气缸活塞杆缩回,转向离合器接合,左、右制动带气缸没有控制气压,活塞在弹簧的作用下缩回,制动带松开。
3.1 转向工作过程
当车辆需要转向(以人工操纵向左转向为例)时,转向手柄扳至左侧,换向阀S1接通换向,左转向离合器气缸活塞杆伸出,离合器完全分离,车辆向左分离转向。在转向手柄扳到左侧的同时,截止阀S4电路接通,右侧制动气缸气路断开,为下一步控制左侧制动带做好准备;转向手柄在左侧向后拉,转向手柄控制电位计,使比例阀控制电流增大,输出压力变大,该压力作用在左制动带气缸,此时车辆进行部分制动转向,制动带气缸压力、转向角速度、左右车轮转速曲线如图7所示。转向手柄后拉行程越大,比例阀控制电流越大,制动力越大,转向半径越小,实现了通过转向手柄对转向半径进行控制;当转向手柄拉到最后,比例阀控制电流达到最大,输出气压达到最大,制动带将制动鼓完全抱死,车辆进行制动转向,制动转向时制动压力、转向角速度、左右车轮速度曲线如图8所示。当完全松回转向手柄时,比例阀气压调节到0,左制动带气缸活塞在弹簧作用下回到原位;阀S1、S4断电,S1换向后左离合器气缸回位,转向离合器接合,车辆由转向恢复至直线行驶状态。为控制制动气缸的回位速度,应在制动气缸的排气回路上加装一个阻尼阀。

图7 部分右制动转向试验数据

图8 右制动转向试验数据
3.2 制动工作过程
当车辆需要制动时,踏下制动踏板,制动踏板控制电位计,调节比例阀控制电流,使比例阀输出压力改变,因截止阀S3、S4断电,气路接通,该压力同时作用于左、右制动带气缸,使制动带箍紧制动鼓,车辆制动,踏板行程越大,制动力越大。当松开制动踏板时,左、右制动气缸的压缩气体从比例阀排到大气中,在回位弹簧的作用下,制动气缸活塞回位,制动解除。
转向、制动过程均控制的是制动带气缸,为简化结构,转向和制动操纵的伺服控制共用一个比例阀,由转向手柄和制动踏板共同控制,为保证行车安全,设计时应使制动踏板优先控制比例阀。车辆转向、制动操纵动作逻辑顺序如表2所示。

表2 转向、制动操纵动作逻辑
注:“×”、“√”分别表示该阀的断电与通电。
4 操纵件测量参数对比
按照上述原理改造了某型履带式装甲输送车,并进行了实车试验,原型车与改造车的操纵件相关测试数据见表3、4。按照人机工程学的设计要求[2],最优手操纵力为5~20 N,最优脚操纵力为45~90 N,操纵杆最优行程(短杆)为150~250 mm,从表3、4可知气动操纵件的操作力基本达到了最适宜程度。

表3 操纵杆对比

表4 制动踏板对比
5 结论
气动转向、制动操纵特点如下。
1) 简化了操纵装置的结构,减小了整车质量,节省了有效空间,因操纵件与执行机构之间没有机械联系,在连接方式上具有很大的柔性,转向操纵件既可设计成操纵手柄,也可设计成方向舵。改为气动操纵后,可以省去操纵杆及横轴、纵拉杆、拉杆臂、中间轴、转向倾斜拉杆、转向横轴、操纵钩、三臂杠杆和分离推杆等。装甲车辆驾驶舱本来空间狭小,操纵件多,作业空间有限,省去左、右操纵杆后,可以将驾驶室设计得更为合理,驾驶姿势更为舒适,这对军用车辆设计具有重要意义。
2) 操纵省力,操纵行程小,简化了操纵动作,大大减小了驾驶员的劳动强度。原履带式装甲输送车转向操纵使用2个操纵杆,需要双手联合操纵,改造后将左、右操纵杆合二为一,由一个转向手柄取代,使用正转向和反转向时不需要反复交替拉左、右操纵杆,左、右扳动手柄即可实现车辆正转向和反转向的转换,使操作动作大大简化,转向操纵灵活简单,操纵准确性更好,分离转向位置控制更为准确。
3)可以完全按照人机工程学最适宜的操作力和操作行程来设计操纵件,使驾驶舱的作业空间更为合理[3],驾驶姿势更为舒适。由于操纵手柄与受控部件之间没有机械联系,可以将转向手柄与驾驶座椅固定在一起,当驾驶椅升降时,转向手柄一起升降,可消除驾驶椅升降对操纵的影响。
履带车辆传动功率大,工作环境恶劣,转向制动操纵改为气动操纵后,操纵动作迅速,执行机构响应速度快,动作准确可控,实现了转向控制操纵的自动化。经过实车试验证明,气动操纵大大简化了驾驶员的操纵动作,减小了驾驶员的劳动强度,将双手联合操纵简化为一手操纵,驾驶员通过转向手柄、制动踏板发出指令,执行机构能够及时执行指令,控制车辆转向、制动,气动操纵装置既可满足人工驾驶操纵的转向、制动要求,也可满足自主行驶时的转向、制动控制需求。此设计思路与方法可广泛用于履带式森林消防车的操纵改造上,也可用于该型车的再利用改造。
参考文献:
[1] 曹玉平,阎祥安.气压传动与控制[M].北京:天津大学出版社,2010:48-54.
[2] 周一鸣,毛恩荣.车辆人机工程学[M].北京:北京理工大学出版社,1999:160-167.
[3] 牛海燕,田亮,白雅娟.装甲车辆驾驶舱工效学试验系统方案研究[J].车辆与动力技术,2011(3):5-9.
猜你喜欢
工业设计(2022年9期)2022-10-13
机电信息(2022年9期)2022-05-07
农机质量与监督(2021年5期)2021-07-02
儿童文学选刊(2019年2期)2019-09-10
电子制作(2018年11期)2018-08-04
农机使用与维修(2018年5期)2018-07-05
中小企业管理与科技·下旬刊(2016年4期)2016-11-19
科普童话·百科探秘(2015年5期)2015-05-26
小朋友·快乐手工(2015年3期)2015-04-10
汽车科技(2015年1期)2015-02-28
