
一种运动学控制律的无人地面车辆轨迹跟踪方法
2014-04-09 09:38胡军中闫永宝张舒阳
装甲兵工程学院学报 2014年2期
王 恒, 胡军中, 闫永宝, 张舒阳
(1. 装甲兵工程学院控制工程系,北京100072; 2. 浙江美科斯叉车有限公司,浙江 杭州 311407)
由于无人地面车辆(Unmanned Ground Vehicle,UGV)具备遥控和自主驾驶能力,并能对信息进行采集和处理,因而在炸药引爆、场地勘探、安全巡逻、战场营救等领域发挥着重要作用,而且随着技术研究的深入,其应用范围得到不断拓展[1-3]。
轨迹跟踪是UGV运动控制问题的研究重点,也是实现许多其他功能的前提。在给定参考轨迹的情况下,通过对车辆位姿信息的采集和处理,经控制算法运算,将得出的控制量赋予车辆执行机构,能够实现对给定轨迹的跟踪。而轨迹跟踪的关键是控制算法的制定,基于不同的思想,为改进控制算法,提高跟踪效果,许多学者进行了深入研究[4-8]。在运动学控制算法中,如何调整车的行驶方向是一个重要的问题,其直接影响到跟踪误差收敛的速度。文献[9]给出了一种始终保持车体朝向参考点位置坐标的算法,虽简单易行,但跟踪效果不是总能达到要求[10]。也有学者提出使用2个模糊控制器分别控制线速度与角速度,进而得到调整车体朝向角的策略[11],虽有一定效果,但控制规则的制定需大量经验基础,实现和优化起来比较困难。
为此,笔者基于优化车体方向角调整策略的思想,提出了一种运动学控制算法,并与文献[12]给出的基于反步法的控制律进行了仿真跟踪对比,证明了该算法的有效性。
1 运动学模型及跟踪控制问题描述
为便于分析,运动学建模过程中假定UGV同侧车轮转速保持一致,车体为刚性框架,车轮为刚性轮,重心与几何中心重合,且与地面间为纯滚动,忽略滑转与滑移。跟踪位姿状态如图1所示,在全局坐标系XOY中,UGV当前位姿坐标为(Xc,Yc,θc),参考点位姿坐标为(Xr,Yr,θr);在局部坐标系xoy中,当前位姿和参考点位姿坐标分别为(xc,yc,θc)和(xr,yr,θr)。

图1 跟踪位姿状态
令(Xe,Ye,θe)和(xe,ye,θe)分别为全局坐标系和局部坐标系下的位姿误差,由图1可得
令车体的线速度为v,角速度为w,则速度与位姿坐标之间存在如下关系[13]:
进而得到
(1)

2 控制律设计及稳定性分析
2.1 跟踪控制律设计
定义辅助变量如下:
(2)
(3)
式中:L为当前位置与参考点之间的距离;φ为L与车体当前朝向到参考点转过的角度。极坐标系下的误差可用L、φ和θe表示,即
(4)
结合式(1)、(4),可以得到[12]
(5)

在轨迹跟踪问题中,首要考虑的是当前点与参考点之间的距离,即L的大小。为使L趋近于0,可将UGV的线速度视作2个方向速度的合成,即
ν=f(νl,νr),
式中:|νl|=KνL,νl的方向是从当前点指向参考点,起到逐步减小L的作用,Kν为一个恒大于0的参数;νr为参考点的线速度,作用是确保跟踪上参考轨迹。如图1所示,定义辅助变量ν′,其大小及与X轴方向的夹角分别为
(6)
(7)
控制量ν的大小取为νl和νr在车体纵向速度方向上的投影之和,即
ν=νlcosφ+νrcosθe,
(8)
将|νl|=KνL代入式(8),得到线速度的控制律为
ν=KνLcosφ+νrcosθe。
(9)
由图1可见:要使车辆沿ν′方向行驶,须通过给定合适的控制量ω来调整车体方向角与θ′重合。给出角速度的控制律如下:
(10)
式中:Kω为一个恒大于0的参数。
由式(7)可得
(11)
(12)
式中:
(13)
(14)
由vl=KvL和式(5)可得
(15)
综合式(10)-(15),得到角速度的控制律如下:
ω= [β2+v′(Kω(vlsinφ+vrsinθe)+
Lsinφ)]/(1-β1)。
(16)
2.2 稳定性分析
为证明式(9)、(16)所给出控制律的稳定性,定义李雅普诺夫函数如下:
V=L2/2+1-cos(θ′-θc)。
(17)
由式(17)可见:V≥0,当且仅当qe=0时,V=0。对V求导,可得
(yeω-ν+νrcosθe)xe+(-xeω+νrsinθe)ye+
Lcosφ(νrcosθe-ν)+Lνrsinφsinθe+
[((β1-1)ω+β2)(vrsinθe+vlsinφ)]/v′。
(18)
将νl、ν和ω的表达式代入式(18),可得
Lvrsinφsinθe+Kω(vlsinφ+vrsinθe)+
Lsinφ(KvLsinφ+vrsinθe)=KνL2-
Kω(KνLsinφ+vrsinθe)2,
(19)
3 算法仿真
笔者运用Matlab/Simulink对本文提出的算法和Kanayama算法[12]进行了圆形轨迹仿真跟踪对比,以验证本文算法的跟踪效果。
参考曲线参数为:νr=1 m/s,ωr=0.1 rad/s,(Xr(0),Yr(0),θr(0))=(30,0,π/2); UGV初始点位姿为(25,0,0);试验中控制参数取为Kv=0.8,Kω=2。跟踪仿真效果如图2-8所示。
从仿真结果可以看出:本文提出的跟踪算法能有效跟踪圆形轨迹,与Kanayama算法相比,误差收敛速度更快,且所需速度与角速度分配也更加合理。

图2 跟踪圆形轨迹结果

图3 距离误差变化曲线

图4 X方向误差变化曲线
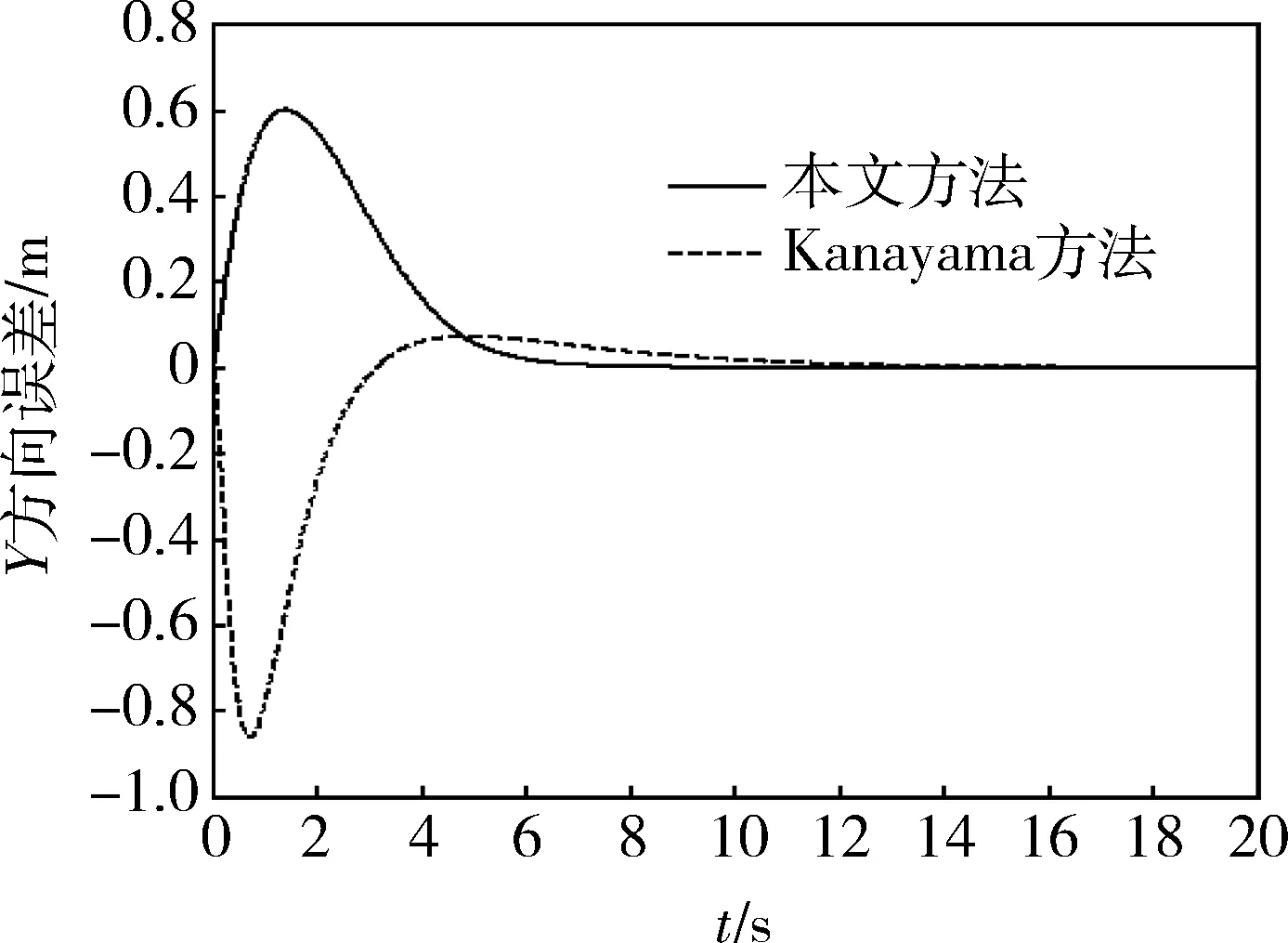
图5 Y方向误差变化曲线

图6 方向角误差变化曲线

图7 角速度变化曲线

图8 线速度变化曲线
4 结论
针对UGV轨迹跟踪问题,本文提出了一种基于极坐标运动学的控制算法。该算法的核心思想是通过对车体方向角调整算法的优化,使UGV时刻沿着更为合适的方向前进,进而达到提高跟踪效果之目的。由于控制算法中只需调节2个参数,因而与模糊控制等需要大量经验基础的算法相比,实现和优化的过程更加简单。从仿真结果来看:该算法能够有效实现UGV的轨迹跟踪,误差收敛速度较快。
参考文献:
[1] 岳松堂,张志杰.外军无人地面车辆发展分析[J].现代军事,2007(11):53-56.
[2] 刘向平,薛杰.无人地面车辆:地面战争的新利器[J].国外坦克,2013(3):45-52.
[3] 满益明,陈慧岩,胡玉文,等.无人地面平台研究概况及其关键技术[C]∥中国汽车工程学会越野车技术分会.2008年学术年会论文集.北京:北京理工大学出版社,2008:55-64.
[4] Moon H C, Lee J C,Kim J A, et al. Development of Unmanned Ground Vehicles Available of Urban Drive[C]∥Proceedings of International Conference on Advanced Intelligent Mechatronics. Singapore: Institute of Electrical and Electronics Engineers Inc,2009: 14-17.
[5] Woo H J, Yoon B J, Cho B G, et al. Research into Navigation Algorithm for Unmanned Ground Vehicle Using Real Time Kinematic (RTK)-GPS [C]∥Proceedings of ICROS-SICE International Joint Conference. Japan:Society of Instrument and Control Engineers, 2009:18-21.
[6] Filipescu A, Minzu V, Dumitrascu B, et al. Trajectory-tracking and Discret-time Sliding-mode Control of Wheeled Mobile Robots [C]∥Proceedings of IEEE International Conference on Information and Automation. Piscataway, USA: IEEE Computer Society Press,2011:27-32.
[7] Kao Y F, Chien Y H, Li I H, et al. Design and Implementation of Adaptive Dynamic Controllers for Wheeled Mobile Robots[C]∥Proceedings of ICSSE 2013 IEEE International Conference on System Science and Engineering. Oxford,United Kingdom: Elsevier Ltd, 2013: 195-199.
[8] Al-Araji A S, Abbod M F,Al-Raweshidy H S,et al. Design of an Adaptive Nonlinear PID Controller for Nonholonomic Mobile Robot Based on Posture Identifier[C]∥Proceedings of IEEE International Conference on Control System, Computing and Engineering. Piscataway, USA: IEEE Computer Society Press,2011: 337-342.
[9] Chwa D. Tracking Control of Differential-drive Wheeled Mobile Robots Using a Backstepping-like Feedback Linearization[J].IEEE Transactions on Systems, Man, and Cybernetics,2010,40(6): 1285-1295.
[10] Amoozgar M H, Zhang Y M. Trajectory Tracking of Wheeled Mobile Robots: A Kinematical Approach[C]∥Proceedings of 2012 8th IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications.Washington,DC,USA: IEEE Computer Society Press,2012: 275-280.
[11] Amoozgar M H, Sadati S H, Alipour K. Trajectory Tracking of Wheeled Mobile Robots Using a Kinematical Fuzzy Controller[J].International Journal of Robotics and Automation,2012, 27(1): 49-56.
[12] Kanayama Y, Kimura Y, Miyazaki F. A Stable Tracking Control Method for Autonomous Mobile Robot [C]∥Proceedings of 1990 IEEE International Conference on Robotics and Automation. Cincinnati, USA:IEEE Computer Society Press,1990: 384-389.
[13] 徐俊艳, 张培仁. 非完整轮式移动机器人轨迹跟踪控制研究[J].中国科学技术大学学报,2004,34(3):376-380.
猜你喜欢
湖北农机化(2020年22期)2021-01-18
好日子(下旬)(2020年6期)2020-08-04
现代信息科技(2020年22期)2020-06-24
浙江海洋大学学报(自然科学版)(2020年5期)2020-06-19
电子制作(2019年15期)2019-08-27
电子技术与软件工程(2019年6期)2019-04-26
消费导刊(2019年3期)2019-01-28
科技与创新(2018年12期)2018-06-22
冰雪运动(2016年5期)2016-04-16
海军航空大学学报(2015年1期)2015-11-11
