
嵌入式大气数据三点解算方法初步研究
2014-04-06 12:49李其畅刘劲帆杨轶成陈建中田沛洲康洪波朱世民
空气动力学学报 2014年3期
李其畅,刘劲帆,刘 昕,杨轶成,陈建中,田沛洲,杨 杰,康洪波,朱世民
(1.中国空气动力研究与发展中心,绵阳 621000;2.中航工业成都凯天电子股份有限公司,成都 610091)
0 引 言
飞行器在大气中飞行,对其周围的大气数据感知的准确与否直接关系到飞行器飞行和控制的安全和效率,直接影响到飞行器的操控性能和飞行品质[1-2]。由于飞行器要进行高机动飞行,传统的姿态角传感器只在中小迎角范围具有适应性;对于追求最大限度的隐身能力的新一代飞行器设计而言,传统的安装在飞行器前体的空速管和表面风标等凸起物,无疑是飞行器隐身设计的重大障碍。外插式大气数据系统产生的激波会对发动机的进气道的气流产生不利的屏蔽作用,导致进气道效率下降,进而影响飞机性能,还可能加剧飞行器绕流的非对称特征,产生附加的强烈的侧向力和偏航力矩,可以引起飞行器的操控能力和飞行品质降低,甚至导致飞行器失控而引发灾难。
嵌入式大气数据系统是保证新一代飞行器高机动、隐身及超声速巡航等综合技战术指标实现的关键技术之一。
嵌入式大气数据系统已经在航天飞机、巡航导弹(前体钝头)飞行器和X-43超声速(尖锐头部)飞行器上得到应用,其可靠性已得到工程验证。美国的X-31验证机就是采用嵌入式大气数据系统的典型代表,美国早期在F-18飞机上试验过该系统,F-22和F-35战斗机也同样采用了嵌入式大气数据系统[3-7]。
1 气动设计的基本准则
嵌入式大气数据系统是相对传统的外插式大气数据系统而言的,在飞行器飞行包线范围内,基于其机头或前机身表面的压力分布,提取其飞行空速、飞行高度、飞行迎角和侧滑角等设计理念。其主要特点是飞行器大气数据感受器和飞行器是一体化设计,从而保证飞行器的整体最优气动外形。其气动力设计的内容包括飞行器前机身流动特征及其机理研究;测压孔位置的选取,测压孔的布置方式以及测压孔数量的确定;飞行器表面的压力系数与其飞行速度、高度、迎角和侧滑角的复杂函数关系的建立等。这些都是嵌入式大气数据系统设计的关键技术。
嵌入式大气数据系统气动设计的基本准则为:在设计解算迎角、侧滑角的测量孔时,要求测压孔所感受的压力对迎角和侧滑角较为“敏感”;在设计解算飞行空速和气压高度测压孔设计时,则要求所设置的压力测量孔对迎角和侧滑角的变化反应“迟钝”;飞控系统还要求嵌入式大气数据系统满足工程可靠性的要求。
2 “三点”解算方法
模型头部为球冠外形(见图1),其表面某测点的压力表达式:

式(1)中,θi为第i个压力测压点的流向角,方向定义为第i个压力测压点的法向与当地气流速度矢量的夹角,流向角θi包含当地的当地气流迎角αe与当地气流侧滑角βe。ε为该方程的调剂参数。

其中,λ 为圆锥角;φ 为周向角;qc为冲击压力;p∞0为来流静压。

图1 圆锥角与周向角定义示意图Fig.1 Sketch map ofλandΦ
从求解得到的αe、βe、qc、p∞0四个基本参数便可以确定大气数据(总温除外)。
球冠模型压力测压点及其圆锥角与周向角的定义见图2。
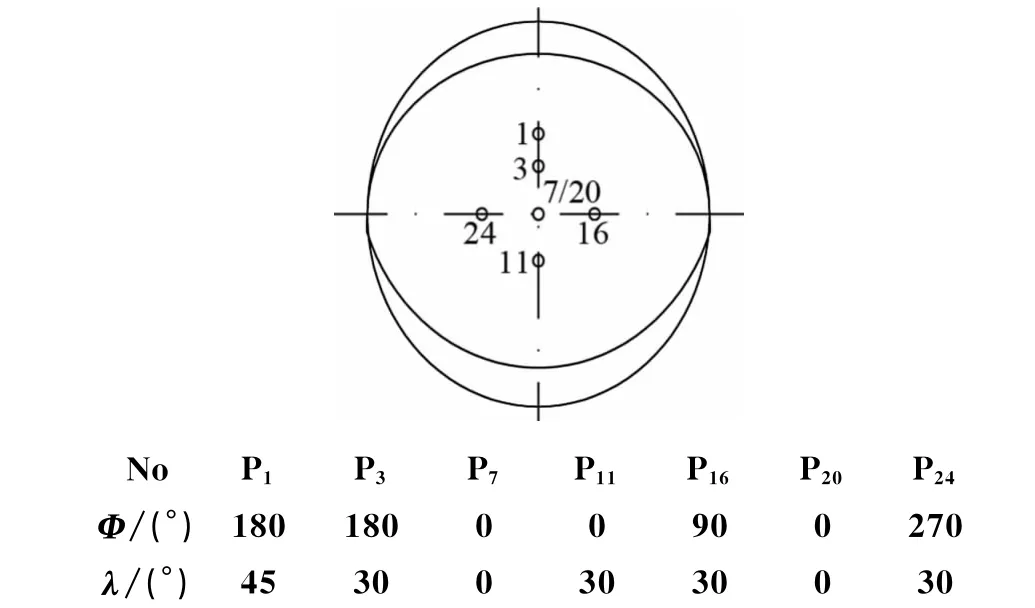
图2 模型测点示意图Fig.2 Sketch map on probes of model
2.1 当地气流迎角解算
式(1)中,在模型上选取3个测压点的压力可以求解qc、p∞0与ε。

这里:Γik≡pi-pk;Γji≡pj-pi;Γkj≡pk-pj。

在式(3)中,αe与βe是耦合关系,当将第i、j、k测压点设置在模型的子午面上,即:φ=0°、180°,实现αe与βe解耦,式(4)便是式(3)的αe解。
2.2 当地气流侧滑角解算

由式(5)求解βe,同样面临着的αe与βe耦合的问题。式(4)中已经得到αe,当设定第i、j、k测压点在与模型的子午面正交的竖直面上时,同样实现αe与βe解耦,便可以由式(5)求解βe。
2.3 马赫数、静压、冲击压力解算
当αe、βe确定以后,ε是qc、p∞0的隐函数。

ε作为调剂参数。通过求解式(6)、式(7),可以得到ε、p∞0、qc。
调剂参数ε,与飞行器飞行迎角、侧滑角和M 数三个参数相关联。
对亚、跨声速流:

对超声速流:

3 结果初步分析
3.1 迎角解算结果分析
表1给出了β=0°,M=0.60、0.95和1.80条件下,依据当地气流迎角与模型迎角工作曲线所求解的模型迎角与模型真实迎角的部分结果。第1、3、7测压点和11测压点分别为子午面上(测压点在模型上的布置见图2,以下同)。在给定的相同试验条件下,第1、3、7测压点加上第16、24测点组合定义为状态A,第3、7、11测压点加上第16、24测点组合定义称为状态B。由表中结果不难看出,在亚、跨、超声速条件下,在试验状态范围内,由三点算法求解模型的迎角与模型的真实迎角具有较好的一致性,且具有较高的精准度。
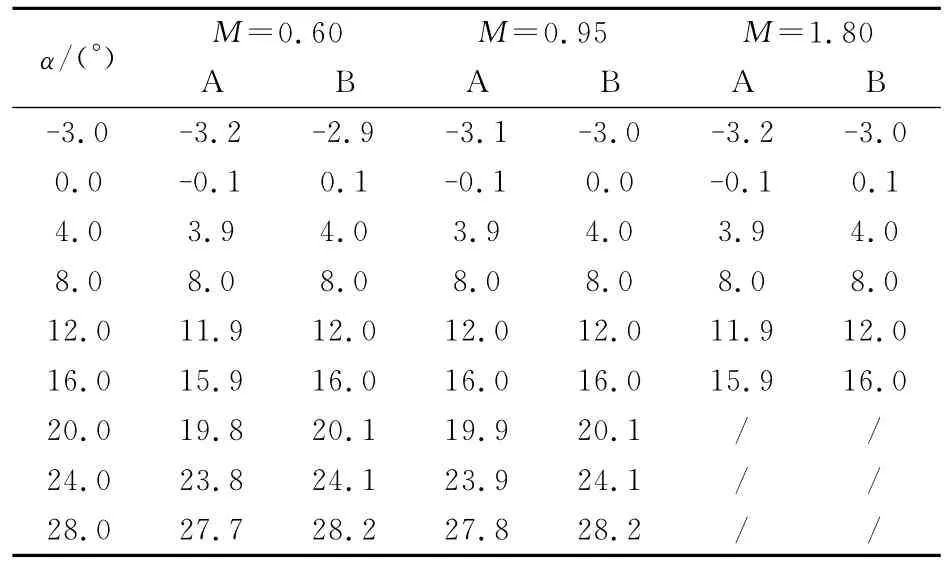
表1 迎角解算结果表Table 1 The results of angle of attack
3.2 侧滑角解算结果分析
表2为 M=0.60、0.95和1.80条件下,依据当地气流侧滑角与模型侧滑角工作曲线所求解的模型侧滑角与模型真实侧滑角的部分结果。与解算的模型迎角结果相似,亚、跨、超声速条件下,在试验状态范围内,由三点算法求解模型的迎角与模型的真实迎角具有较好的一致性,且具有较高的精准度。

表2 侧滑角解算结果表Table 2 The results ofβ
3.3 解算来流静压、M 数与风洞来流静压、M 数对比
表3给出在来流 M=0.60、0.95和1.80,迎角0°、8°、16°、侧滑角0°条件下,解算静压P∞0与来流静压P∞的比较。结果表明,解算静压P∞0与来流静压P∞具有较好的一致性,两者的差异不超过100Pa。表明该解算方法所得到的来流静压P∞0具有较好的解算精准度,满足大气数据解算的静压的精准度的要求。
表4则给出在来流 M=0.60、0.95和1.80,迎角0°、8°、16°,侧滑角0°、±5°和10°条件下,所解算的马赫数Ma与来流M∞比较,可以看出解算马赫数Ma与来流M∞的一致性较好,可以满足大气数据解算的Ma数精准度的要求。

表3 来流静压解算结果表Table 3 The results of static pressure

表4 来流马赫数解算结果表Table 4 The results of Mach number
4 结 论
通过以上初步分析,可以得出如下结论:
(1)嵌入式大气数据系统气动设计所选定的研究模型、其测压孔的布置合理,具有工程实用性。
(2)在验证试验条件下,嵌入式大气数据系统气动设计所研究的三点解算方法,所解算的来流静压、M 数和模型的迎角、侧滑角具有较好的解算精准度,可以满足工程设计的需求。
[1]郭锁凤,申功璋,等.先进飞行控制系统[M].北京:国防工业出版社,2003.
[2]高金源,李陆豫,等.飞机飞行品质[M].北京:国防工业出版社,2003.
[3]WOESTE T J.Shuttle entry air data system-an experimental investigation of calibration for ascent flight[R].AIAA 92-0133.
[4]LARSON T J,WHITMORE S A,EHERNBERGER L J,et al.Qualitative evaluation of a flush air data system at transonic speed and high angle of attack[R].NASA TP 2716.1987.
[5]ELLISON W F.Design and flight testing of the X-35air data system[R].AIAA 2003-5319.
[6]LARSON T J.Wind tunnel investigation of an all flush orifice air data system for a large subsonic aircraft[R].NASA TP 1642.1980.
[7]LARSON T J.Subsonic tests of an all-flush-pressure-orifice air data system[R].NASA TP 1871.1981.
猜你喜欢
能源工程(2022年2期)2022-05-23
北京航空航天大学学报(2021年6期)2021-07-20
水利规划与设计(2020年1期)2020-05-25
火箭推进(2020年1期)2020-03-06
中国交通信息化(2019年2期)2019-03-25
电子技术与软件工程(2018年8期)2018-12-25
软件(2016年5期)2016-08-30
科技与创新(2015年13期)2015-07-03
弹箭与制导学报(2015年1期)2015-03-11
科技传播(2014年4期)2014-12-02
