
基于HSV空间的红外偏振图像改进融合算法
2014-03-29 02:10:08周彦卿顾静良
激光与红外 2014年12期
周彦卿,张 卫,顾静良,邹 凯
(中国工程物理研究院应用电子学研究所,四川绵阳621900)
1 引言
红外成像技术凭借其被动工作,抗干扰能力强,全天候工作等特点,一直是目标探测的最重要技术。然而由于成像原理的限制,对于小温差目标以及红外伪装目标的探测一直是红外探测技术的软肋。
偏振成像是近20年来发展迅速的新成像体制,它通过检测目标反射光中的偏振信息,并用图像将检测结果表现出来。据资料,绿色植被的热红外偏振度大约为0.5%;岩石与沙土的热红外偏振度大约为1%;沥青混凝土公路的热红外偏振度大约为1.7%~3.4%[1];水体的热红外偏振度大约为8%~10%[2];金属的热红外偏振度大约为2%~7%[3-4];可以看出,不同目标的热红外偏振度存在着可分辨的差异,故可利用红外偏振技术探测小温差目标和红外伪装目标。
红外偏振成像探测目标的反射辐射和自发辐射的偏振态。由于偏振度图像、偏振角图像和原始红外图像各有特点,且都包含不同种类的目标信息,故进行图像融合可以有效利用各图像的信息。而采用标准HSV融合的偏振图像强度在一些情况下较红外原图降低很多,变相降低了整个红外探测系统的探测能力。因此,十分有必要研究针对性的图像融合方法以提高红外偏振图像的对比度和强度。
2 偏振成像原理
2.1 偏振的产生
光波包含了振幅、频率、位相和偏振态等一些信息。振幅反映出光强大小,频率造就了光的色彩,而偏振态反映光与介质的作用过程与特性。由菲涅尔反射定理,非偏入射光经目标表面反射后,将变成部分偏振光,此结论对于红外光亦成立;基尔霍夫辐射理论指出,目标的红外偏振特性由目标的自发辐射和反射辐射两部分组成,它与目标材质的折射率、粗糙度、红外光的波长、入射角等因素有关。
2.2 偏振的描述
描述偏振态,常采用斯托克斯矢量法。它定义了4个变量,S0、S1、S2、S3。变量S3描述的是圆偏振的方向,一般值很小,可以忽略。当光线通过一片偏振片时,岀射的辐射强度可以表示为:

式中,I(α)是偏振方位角为α时的偏振光强。取α为0°、45°、90°、135°,得到下式:

由斯托克斯矢量法,目标的偏振角θ和偏振度P可以表示为:

由式(3)可知需要4幅图像:I(0)、I(45)、I(90)、I(135)解算出斯托克斯矢量,进而才能解算出偏振度和偏振角图像。

图1 飞弹模型的偏振成像Fig.1 polarization imaging of a rocket model
图1 是在室外自然光环境下飞弹模型的中波红外偏振图像。图1(a)为飞弹模型的红外图像,平均灰度约为187.5,背景的平均灰度约为234.4。图1(b)为飞弹模型的偏振度图像,灰度归一化后(8 bit),图像平均灰度约为1.02;图1(c)为偏振角图像,灰度归一化后(8 bit),图像平均灰度为34.93。偏振度图像和偏振角图像的强度太低,会降低信噪比。因此,需要进行图像融合,以改善图像对比度、信噪比和强度。
本研究通过比较学龄期ALL患儿自评和家长代评生活质量得分,了解了ALL患儿整体生活质量状况;也进一步证实患儿和家长总体评价间不存在明显差异,当患儿自评存在困难时,家长代评具有一定的参考价值;并且提示了在临床工作中,应充分结合患儿和家长两者的汇报,以提供更全面、更优质、更个性化的护理。
3 HSV图像融合
3.1 基于标准HSV空间的图像融合
HSV颜色空间由RGB颜色空间发展而来,它经常用于偏振图像的融合和其他的多图融合。不同于RGB颜色空间,HSV是为人眼感观优化建立的颜色空间,其中,H代表色调,是HSV空间的最重要属性,指平常所说的颜色名称,如红色、黄色等;S代表饱和度,指色彩中白色的成分大小;V代表亮度。
偏振成像系统需要使用偏振片作为检偏器,它会降低偏振图像的强度;根据式(2)、式(3),S1、S2的强度很小,导致偏振度P在数值上很小[5]。从图1分析,原始红外图像和S0图像的亮度大,细节丰富,但飞弹模型的对比度不够;通常而言,偏振度图像是目标整体对比度最好,图像整体强度最低,人造物轮廓较为明显但表面特征不明显;偏振角图像能较好地反映出目标表面特性,但亮度太低,噪点较多,整体对比度不如偏振度图像。
实际应用中,较关注的指标是目标对比度和全图信噪比。在保证对比度和信噪比的基础上,希望目标细节信息以及整幅图像的强度能满足要求,即要保持红外探测系统的探测能力[6]。结合偏振度图像、偏振角图像和红外原图的各自特点,通常会选择对比度和信噪比都较高的偏振度图像作为主要融合成分;选择目标表面特征丰富、目标突出的偏振角图像作为次要融合成分;选择图像细节最丰富、强度最高的红外原图对偏振图像的细节和强度进行补充。
标准HSV空间的图像融合选择将H、S、V分别对应成偏振度、偏振角、偏振强度。由于偏振度图像的值域[0,1],偏振角图像的值域[-π/4,π/4],红外原图值域[0,256];如果直接使用上述图像进行融合,会导致偏振度、偏振角图像分量太小,融合效果不佳。此时,需要将以上三种图像归一化放大,让三种图像的强度处于同一数量级,故在图像融合之前要对各图像的灰度归一化处理,再根据公式将HSV图像转换为RGB图像,公式如下:

式(4)中,h,s,v分别对应偏振度图像,偏振角图像,红外原图。计算出(r,g,b)之后,可以直接查看RGB图像的融合效果,亦可按式(5)合成灰度图像,方便后期处理。
3.2 改进的HSV融合算法
标准HSV图像融合是一种基础的、简便的图像融合方法,具有一定的效果,但是并非适用于所有场合。它的强度归一化方法是基于值域的,若其中一种图像的平均灰度比值域小很多,那么按照值域进行强度归一化的作用不大[7];它三种图像的融合权重是固定的,并没有根据各图像的不同状态进行调整,使得融合效果不稳定。
针对标准HSV图像融合的问题,本文提出了一种改进融合算法。

式(6)中,G是图像的平均灰度;g(x,y)是点(x,y)的灰度值;i,j为图像的长宽分辨率。
其次,图像融合的目的是为后续的目标搜索提供对比度高、信噪比高的图像,为此,可以利用各图像的目标对比度、全图信噪比等评价数据计算出各图的融合权重,优化融合效果。
峰值信噪比是一种经典的图像客观评价指标,它常用于评价滤波、去噪后的图像,它反映了图像的保真度,计算如式(7):

式中,M,N分别是图像每行、每列的像素点;g(i,j)、f(i,j)分别是修复后图像和原始图像,本文定义红外原图为f(i,j),偏振度图、偏振角图、融合图为g(i,j)。需要注意,对于弱小目标的图像,采用全图信噪比没有意义,因为目标只占图像中很少的像素点,此时需先将图像划分为多个局部区域,分别计算各局部区域的信噪比,再计算多个区域的平均信噪比[8]。本文不涉及弱小目标,故采用全图信噪比进行图像评价。
目标对比度反映了目标区域在整幅图像中的突出程度,它对于目标搜索是非常重要的指标,可以按(8)式计算:

式中,C是对比度;fT,fB分别表示目标区域的平均灰度和背景的平均灰度。这里的目标区域是手动选取的一个矩形框,框外作为背景,如图2所示[9]。

图2 目标区域选择框Fig.2 selection of the target area
利用这两个评价参数,按照式(9)计算出融合权重,将新得到的h,s,v代入式(4)进行融合:

式中,h,s,v分别对应式(4)中的h,s,v;IDOP,Iangle,IIR分别指归一化处理后的偏振度图、偏振角图以及红外原图的强度;C代表对比度;SNR代表信噪比;ih,is是根据偏振度、偏振角图像的对比度和信噪比得到的权重。h,s根据融合权重对偏振度图、偏振角图再次进行图像强度的调整,最后赋予h,s,进行标准HSV融合。
3.3 流程图
如图3所示,算法计算出偏振度图像、偏振角图像和IR图像的灰度均值和极值;根据灰度均值对各图像进行强度归整,得到强度修正后的各图像;再根据目标对比度和峰值信噪比算出融合权重;最后按照权重对强度归一化后的图像进行基于HSV的图像融合,得到最终融合图像。
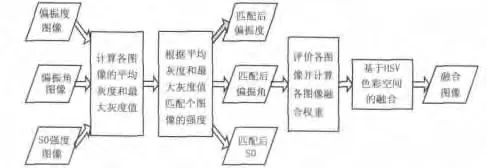
图3 基于改进HSV空间的融合算法流程Fig.3 flow chart of polarization image fusion algorithm based on improved HSV
4 实验仿真与评价
选择白天在室外晴朗环境下,对中近距离(约50 m)的飞弹目标进行中波(3~5μm)红外偏振成像实验,并对标准HSV融合图像和改进的HSV融合图像进行评价。实验系统选择制冷型中波红外相机,工作波段(3~5μm),分辨率320×240,精度为14 bit(即图像的最大灰度为16384);偏振片为BaF2基底的金属丝栅偏振片,作用波段2~30μm,消光比为300∶1。
由图4,红外原图中飞弹模型与周围背景的对比度并不明显,无法辨识出飞弹模型的形状和表面特性,图像整体强度高,噪点少;标准HSV融合图像中,目标亮度提高,上半部分背景得到抑制,飞弹目标的外轮廓一部分可见,但图像下半部分的背景抑制效果不够,有少数噪点;改进的HSV融合图像,目标本身的亮度有所下降,其外轮廓和表面特性较为清晰,背景被有效抑制,噪点较多。

图4 飞弹模型的偏振图像融合Fig.4 polarization image fusion of the rocket model based on HSV
从图像平均灰度、目标对比度、信息熵和全图峰值信噪比4个方面对图像进行评价,其中,信息熵反映了图像信息量的大小,图像越复杂越不规律越清晰,熵越大。由表1,对比标准HSV融合,改进的HSV融合算法的目标对比度提高2倍,图像平均灰度提高了23%,信息熵提高58%,信噪比降低3 dB。改进融合算法在提高对比度、信息量的能力上较标准HSV融合具有一定优势,而信噪比的降低亦可接受。对比红外原图,改进的HSV融合算法大幅提高了目标对比度,而在平均灰度、信息熵、信噪比方面均有下降,但都在可接受的范围内,这是由于成像机构使用了偏振片,它必然降低图像强度,引入噪点,使得某些弱小细节不可见。

表1 融合图像分析Table 1 analysis of the fusion image of the rocket model
5 结论
红外偏振成像系统需要使用偏振片作为检偏器,偏振片会降低图像强度,引入噪点,这对于目标探测十分不利。标准的HSV融合算法简单快捷,它的特点在于有侧重的融合,但其融合权重固定,不能针对图像特点进行融合;改进型HSV融合算法,根据评价参数计算融合权重,针对偏振度图目标对比度高、图像强度小,偏振角图的目标表面特征、噪点多的特点智能调整各图像的强度,有效提高融合图像的目标对比度和强度,对于偏振成像在目标探测系统中的实际应用很有意义。
[1] Ben Dor B,Oppenheim U P.Polarization properties of targets and backgrounds in the infrared[C].Proc SPIE,1992:68-76.
[2] Joseph A Shaw.Infrared polarization in the natural earth environment[C].Proc SPIE,2002,4819:129-138.
[3] Aron Y,Grunau Y.Polarization in the LWIR[J].Proc SPIE,2005,5783:653-661.
[4] ZHANG Chaoyang,CHENG Haifeng,CHEN Zhaohui,et al.Polarimetric imaging of camouflage screen in visible and infrared wave band[J].Infrared and Laser Engineering,2011,35(3):424-427.(in Chinese)张朝阳,程海峰,陈朝辉,等.伪装遮障的光学与红外偏振成像[J].红外与激光工程,2011,35(3):424-427.
[5] LI Quan,LIU Zejin,SHU Bohong,et al.Application of polarization diversity in active imaging[J].High Power Laser and Particle Beams,2005,17(3):351-354.(in Chinese)黎全,刘泽金,舒伯宏,等.利用表面散射光偏振差异的目标识别技术[J].强激光与粒子束,2005,17(3):351-354.
[6] WANG Qichao,SHI Jiaming,ZHAO Dapeng,et al.Polarimetric contrast characteristics of camouflage target and background[J].High Power Laser and Particle Beams,2013,25(06):1354-1358.(in Chinese)王启超,时家明,赵大鹏,等.伪装目标与背景的偏振对比特性[J].强激光与粒子束,2013,25(06):1354-1358.
[7] ZHANG Lei,LI Jing,LI Genquan,et al.Novel fusion algorithm based on image enhancement[J].Laser&Infrared,2013,43(9):1072-1075.(in Chinese)张雷,李婧,李根全,等.一种新的基于图像增强的融合算法[J].激光与红外,2013,43(9):1072-1075.
[8] ZHANG Lei,ZHANG Yu,WANG Xiaoxia.Application of phase modulation in the visible and infrared images fusion algorithm[J].Laser&Infrared,2013,43(2):213-216.(in Chinese)张雷,张宇,王肖霞.相位调制在可见光与红外图像融合中的应用[J].激光与红外,2013,43(2):213-216.
[9] LI Zhengzhou,MA Qiyou,ZHENG Wei,et al.Infrared dim moving target tracking method based on multiple features[J].High Power Laser and Particle Beams,2011,23(01):54-58.(in Chinese)李正周,马齐佑,郑微,等.基于多特征融合的微弱红外运动目标跟踪方法[J].强激光与粒子束,2011,23(01):54-58.
猜你喜欢
微处理机(2019年5期)2019-11-06 00:28:02
电子制作(2019年12期)2019-07-16 08:45:20
孩子(2019年5期)2019-05-20 02:52:44
测控技术(2018年6期)2018-11-25 09:50:24
数位时尚(幼儿教育)(2017年12期)2018-01-05 01:23:30
山西大同大学学报(自然科学版)(2016年2期)2016-12-12 03:19:15
光学精密工程(2016年3期)2016-11-07 09:03:38
测绘科学与工程(2014年6期)2014-02-27 07:06:23
大学物理实验(2013年3期)2013-10-25 02:47:20
物理与工程(2013年4期)2013-03-11 03:28:22
