
公路隧道太阳光直接增强照明系统的设计
2014-03-27 01:51姚君霞
应用光学 2014年2期
姚君霞,宁 铎
(陕西科技大学 电气与信息工程学院,陕西 西安 710021)
引言
众所周知,当汽车驾驶员在白昼驾车驶入或驶出隧道时,视觉有时会产生“黑洞效应”或者“白洞效应”,即由亮环境至暗环境或由暗环境至亮环境的转换过程中由于亮度梯度差过大而引起的眩光现象,从而影响行车安全。根据医学证明人眼视觉能适应小于0.1 lx的星光视场,也能适应大于100 000 lx 的正午太阳照射下的视场,但是在同一时间内,人眼能调节并适应的照度范围最多只有1 000倍左右。具体来说,当汽车驾驶员从中午太阳光很强(如60 000 lx)的公路上一旦以较高速度进入光线较弱(200 lx)的隧道内的很短时间内,由于隧道内外亮度梯度差太大,往往会引起驾驶员眩晕甚至在短时间内失去视力而发生事故。因此,人眼需要一定的调节时间来适应不同的照度等级,以恢复对路面状况的识别,防止交通事故的发生。
根据文献[1],为了保障行车安全,长度超过100 m的公路隧道都必须安装照明系统。且通常情况由基本照明系统和增强照明系统两部分组成,其中的基本照明系统主要安装在隧道里面,并要求昼夜不停的工作,以保证隧道内路面的亮度;而增强照明系统则是安装于隧道进出口区段作为补充照明系统,主要是为了有效解决驾驶员在隧道进、出口区段由于黑洞(白洞)效应,要求隧道照明在基本照明系统的基础上再在隧道进出口段加装增强照明系统的同时,又为了节约能源,对增强照明系统的亮度设计要求通常不是一个常数,而是随着隧道外面的太阳光照度情况分为四档(晴天、云天、阴天、重阴)进行自适应控制[1]。但是在实际工程中由于隧道所处区域偏僻,系统使用过程中零事故的要求与性能维护不便等客观因素的限制,相当多的公路隧道增强照明系统并没有按照此要求配套安装相应的自动控制系统,但是又必须保证行车安全,所以对于如隧道天气、车速、车流量等参数已知情况下只能在设计时以夏天太阳光强度的最大值考虑其亮度梯度参数而安装增强照明系统;因此目前高速公路隧道增强照明系统实际上存在着大量电能浪费问题。随着新能源的推广使用,如果采用普通的太阳能光伏发电系统完成隧道增强照明功能,除了上述现象依然存在外,这种光-电(14%)-光(38%)变换系统,其总的5%的太阳能利用效率太低也是推广应用的技术瓶颈之一。
近年来我们研制成功的阳光输送机[2-3]主要由聚光器、自动跟踪系统以及光纤3部分组成,如图1所示。虽然该系统能够通过光导纤维把汇聚的太阳光直接输送进隧道里实现太阳光直接照明,并因为避免了光-电转换而实现了太阳能的高效率利用(如传输10 m左右距离进入阴面房间内时40%左右),而且还因为隧道增强照明系统本身要求亮度自动适应隧道外太阳光强度的特点而回避了太阳光时有时无的重大性能缺陷,相比于应用于隧道增强照明的普通太阳能光伏照明方式优势明显,而且也比光导管传输方式安装方便和传输效率高。但是由于其中光导纤维成本高(占系统成本的60%以上)和损耗高[4]长达50 m的光纤其损耗≥70%)又阻碍了其推广应用。因此全面仔细分析隧道增强照明系统技术特点,研究制作一种新型的高效节能、绿色环保、高性价比的专门用于隧道增强照明系统的阳光输送机意义重大。
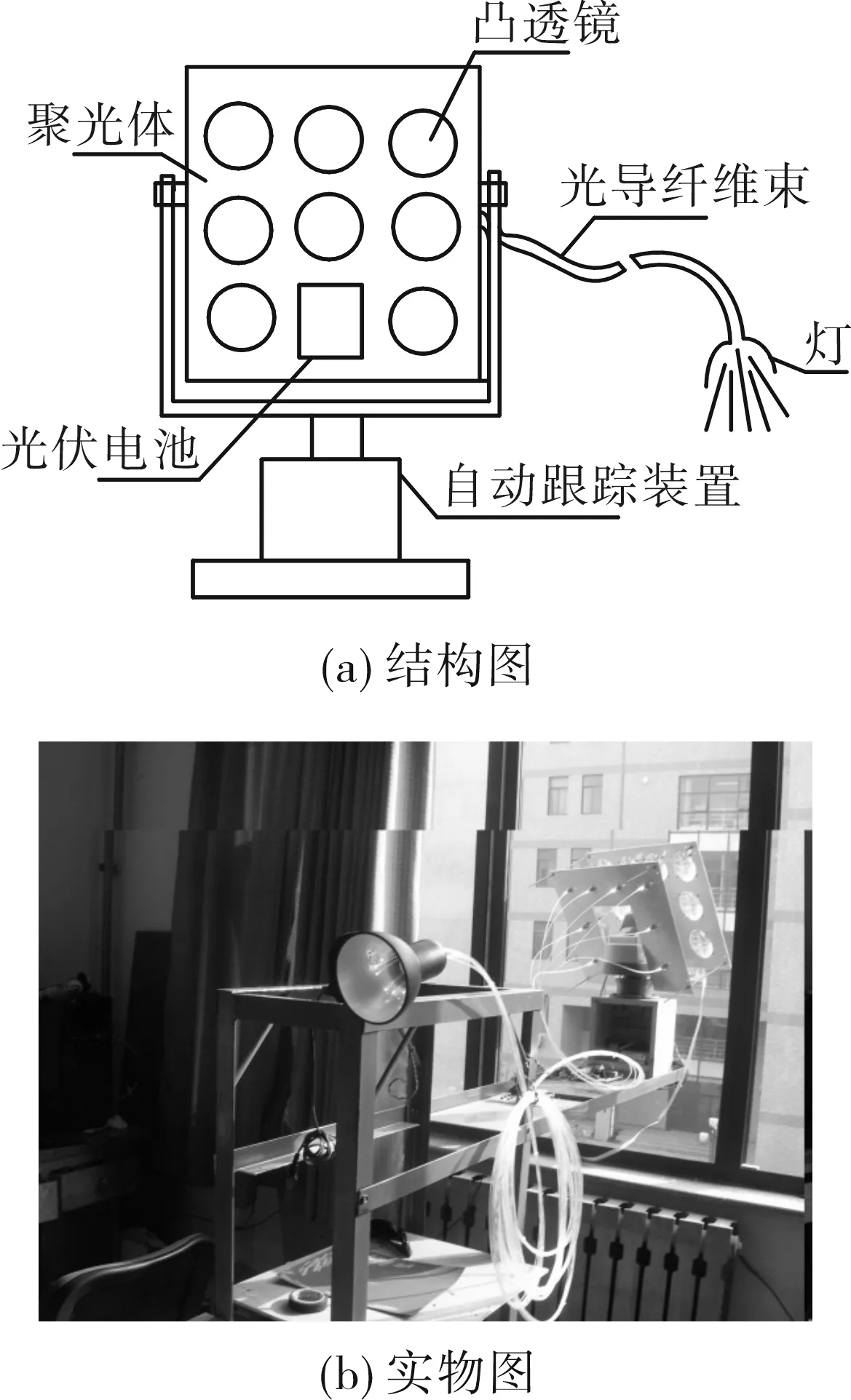
图1 阳光输送机结构图及实物图Fig.1 Structure and physical configuration of sunlight conveyor
1 研究思路
针对阳光输送机和PV-LED隧道照明[5]在多年实际应用中存在的传输损耗大、系统成本高等应用技术问题,基于全面分析公路隧道进出口区段增强照明系统所处位置以及要求其具有自适应性特点[1]的基础上,提出了太阳光直接增强照明新系统,其特点是,直接利用太阳聚光并经过适当的光路变换后得到的增强型平行太阳光在不需要光纤等传输介质的情况下,通过反射在空气中直线传输方式实现隧道进出口段的增强照明功能。
如果采用传统的光纤实现太阳光的传输,则光纤的成本会占到整个系统成本的65%以上,而在该系统中利用平行光的高传输性采用普通导光镜实现对增强型平行太阳光的反射,使其准确反射至隧道顶部的固定位置,再经过涂抹在隧道顶部的高反射率薄膜反射至隧道进出口路面,实现隧道进出口段的良好照度均匀度,而且这种反射式传输方法安全、可靠、成本低。较阳光输送机而言,该系统继续保持了系统本身具有自适应隧道外面亮度的特点,直接满足隧道增强照明系统技术要求条件外,还因为采用直接在空气介质中远距离高效率传输增强的平行太阳光而避免使用光导纤维引起的光损耗,使得整个系统的太阳能利用效率大幅度提高,即使传输过程中被空气中灰尘微粒散射所损耗的部分太阳光实际上都被利用来提高整个隧道空间亮度,并且实现其均匀性,而不会像光导纤维或者导光管转换成为热量等其他能量形式而损失掉;并且避免了用光导纤维传输,这一项就使得系统的成本降低到原来的三分之一以下,其性能完全满足高速公路隧道进出口段的增强照明系统技术要求。因此这种突出的技术优势在今后太阳能的推广应用中具有巨大的社会效益和经济效益。
2 系统组成
隧道平行太阳光直接增强照明系统主要由聚光器、导光装置以及自动跟踪系统3部分组成,工作原理如图2所示。通过太阳光的汇聚及其相应的光路变换后得到高亮度平行太阳光;再经导光镜及其相配套的自动调整系统,把亮度增强但入射方向连续变化的平行太阳光高效率地反射至一直固定不动的隧道顶部,最后经喷涂在隧道顶部的反射薄膜反射到路面,从而实现汇聚太阳光的直接传输并完成隧道进出口段的增强照明功能。

图2 系统原理图Fig.2 Schematic of system
2.1 聚光系统
聚光器的功能是,在高精度自动跟踪系统驱动下把接收的太阳光汇聚后再调整成为增强型平行太阳光输出到导光板,其主要由聚光体和调光体组成,还可以根据聚光方式分为反射方式(反射曲面)[6]、透射方式[7](菲涅尔透镜)、点聚光方式[8](截面为矩形)或者线聚光方式[9](截面为圆形),在该系统中以菲涅尔透聚光镜和调光镜来实现透射式圆形平行光输出的点聚光,聚光器中聚光镜和调光镜是2个大小与焦距不同的菲涅尔透镜,其空间结构上必须是处于同光轴且二者之间的距离为2个透镜焦距之和;此外安装在聚光镜上的太阳光信号采集器的光轴与聚光镜的光轴在三维空间平行,通过它与相应的信号处理器和驱动结构同时工作,保证聚光器的光轴一直保持与太阳光线平行的状态,从而实现太阳光经过聚光镜汇聚增强后,再利用调光镜变换成增强型平行太阳光输出到导光镜。其结构图及样机如图3所示。
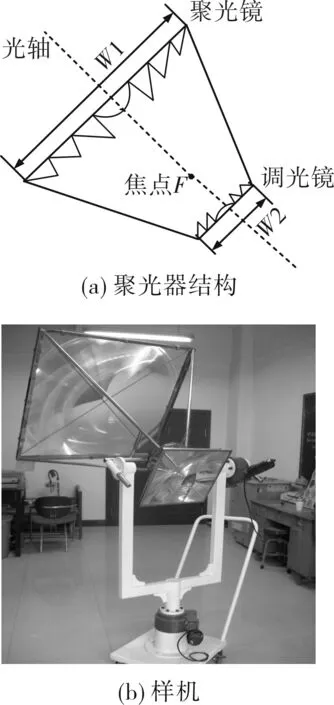
图3 聚光器结构图及样机Fig.3 Structure of sunlight concentrator and prototype
对于折射率相同的菲涅尔聚光透镜和菲涅尔调光透镜以上述结构组合安装。
垂直入射的太阳光经过聚光镜投射到调光镜的平均能流密度(在光学领域,光强定义为平均能流密度)可表达为
Ee=ηcEs
式中:Es是垂直入射到聚光镜上的太阳辐射能流密度;c是透镜几何聚光比,即聚光镜正入射面积与调光镜面积之比,则c=W1/W2;η是聚光镜的光学效率,它与光在透镜中和界面上传输所产生的光学损失有关[10],是透镜的有效聚光比。由于光学损失很小,因此省略不计,则聚光比就是聚光镜和调光镜的面积之比c=W1/W2。
此外,在该系统中利用不锈钢皮封闭聚光器四周后,只是平整一面朝外,能够有效地防止聚光镜和调光镜凹槽灰尘集聚而影响其太阳光透过率的严重问题。如此透射式聚光器为产品产业化创造了条件。
2.2 导光系统
导光装置的主要任务是把聚光器输出的方向不断变化的增强型平行太阳光以一定角度反射到固定不动的隧道拱顶的反射膜上,进而被反射后照射到路面上,从而完成隧道增强照明任务,其主要由平面反射镜以及相应的自动调整系统两部分组成,其结构图如图4所示。因为早上和下午提供给平面反射镜的增强平行太阳光的方位角的方向几乎相反,从早上开始太阳光大致向西到下午向东在时刻不停地变化,另外,其高度角也在变化。为了保证把这些来自于不同方向的增强平行太阳光以一定角度反射进隧道上部空间,还必须配套相应的自动跟踪系统,这个自动跟踪系统包括太阳光信号采集器、信号处理器和相应的二维驱动装置(包括方位角调整系统和高度角调整系统)所组成。
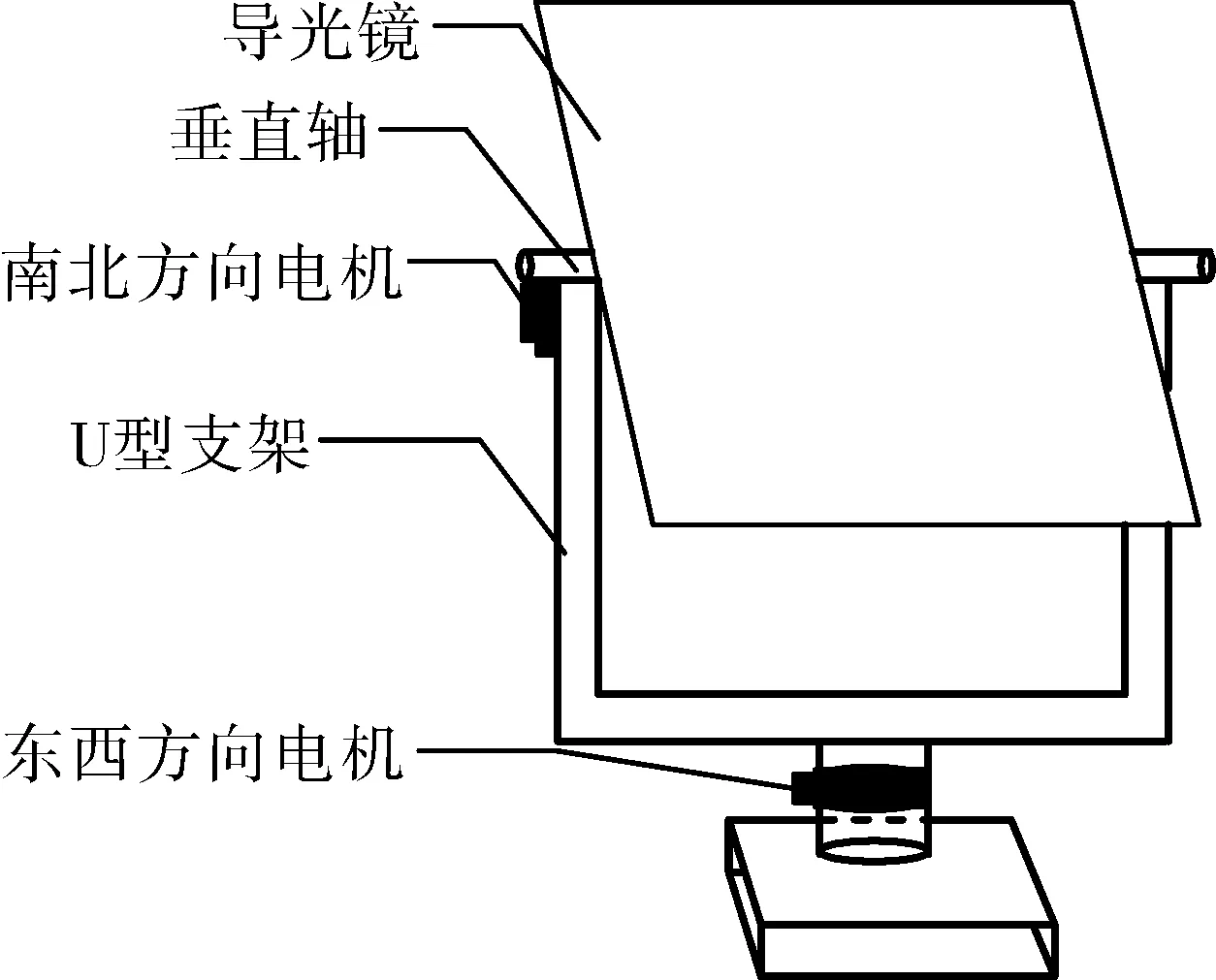
图4 导光系统结构图Fig.4 Structure of sunlight-lead system
为了提高系统的可靠性,对于不同方向的隧道,系统的聚光装置安装方向都与正北方向隧道口的聚光装置的安装方向一致,而导光镜的安装方向则须调整。具体方案是:
对于南北方向的隧道来说,处于正北面(对于地球北半球)隧道出入口处的太阳光直接增强照明系统直接安装于隧道口延长的遮光建筑物上面即可;处于正南面隧道进出入口处的增强照明系统,仅须在北面隧道增强照明系统中导光镜安装的基础上把导光镜的倾斜角转动一定角度即可,其光路图如图5(为了使光路变换清楚可见,没有画出导光镜,只画出了导光镜对应的法线)所示。
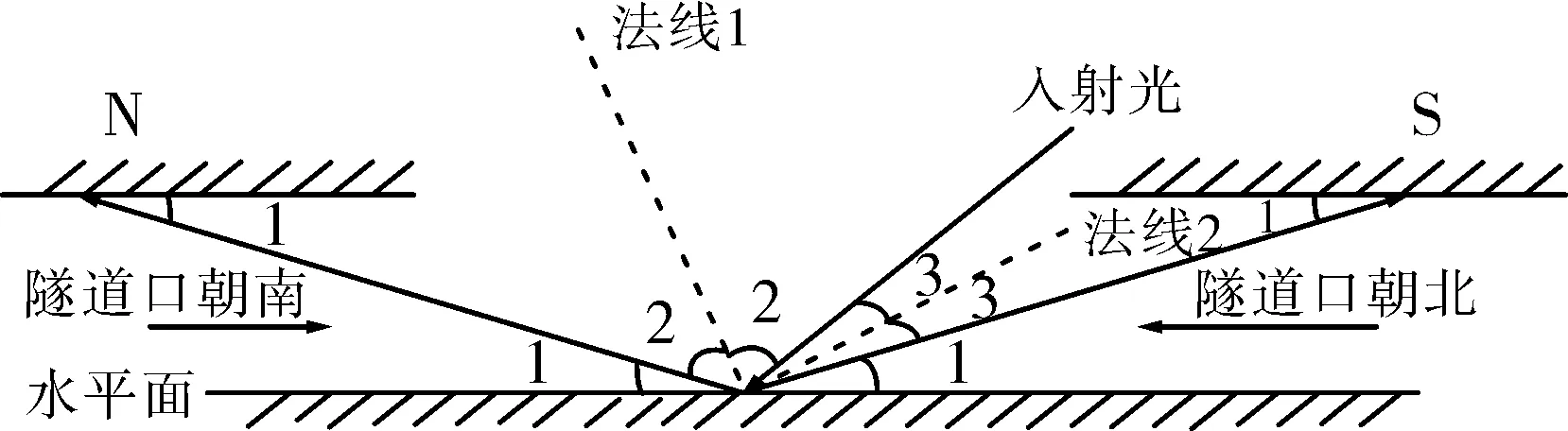
图5 南北朝向隧道的光路变换图Fig.5 Optical path transforming in south and north sides of tunnel
图5中∠1是导光镜输送的光线的光轴与隧道顶部直线之间的夹角,且tan∠1=H/S,其中H为平行光的高度(其取值取决于隧道宽度和隧道顶部弧度的大小),S为隧道内输送的直线距离(一般在40 m左右)。不管隧道进出口朝南或朝北,对于满足要求的太阳光增强照明系统,其入射太阳光与隧道顶部的夹角是不变的,分析上图可知,对于南面进出口的隧道的导光镜只须在北面进出口隧道的导光镜的基础上按顺时针方向(由东到西)旋转∠1的余角大小就可满足要求。
对于东西方向或者其他任意方向的隧道进出口处的过渡区增强照明装置,同样可以根据当前隧道与北面隧道的方向夹角α的大小,在北面隧道增强照明系统安装的基础上由调整系统自动调整导光镜的角度即可,该调整角为α/2─∠1,旋转方向由当前隧道与北面隧道的地理位置有关。
2.3 跟踪系统
在本文中,针对受光体位置固定不变的隧道增强照明系统提出了一种新型太阳光极轴式自动跟踪系统和导光镜自动调整系统。其中太阳光极轴式自动跟踪系统保证太阳光始终垂直入射聚光器,导光镜自动调整系统保证来自不同方向的增强平行太阳光按照一定角度顺利进入隧道上部空间,其中的2个信号采集传感器都是根据四象限光电检测原理[11]研制的具有自主知识产权的太阳光信号采集器[12],分别安装于聚光镜和入射隧道顶部的光路上,前者要求其光轴与聚光器光轴平行,后者的光轴要求与进入隧道的增强平行太阳光的光轴重合。因为地球自转速度比较慢,数据处理量小,所以用一个单片机作信号处理器即可。驱动装置是2个独立的二维驱动装置,分别驱动聚光器和导光镜,分别实现太阳光汇聚和增强平行太阳光以最大量传输进隧道,其跟踪系统原理框图如图6所示。
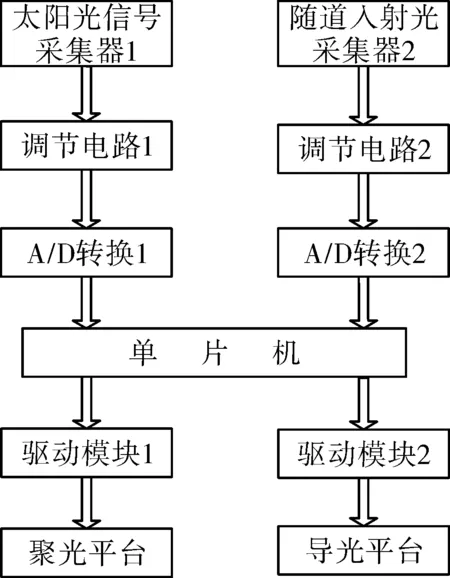
图6 跟踪系统原理框图Fig.6 Block diagram of tracking system
该系统中应用的是透镜非成像的光路变换,要求实现实际跟踪误差小于等于0.02°立体角的高精度自动跟踪系统,才能保证此光学系统按照设计的光路实现增强平行太阳光,高效率、远距离传输并完成隧道进出口区段的增强照明功能。但是,其他天文时间或者计算机设定时间等间接提供太阳光方向信号的方式组成的自动跟踪系统[13]或者其他跟踪方法,实践证明都是无法实现高精度自动跟踪任务的。这种高精度立体自动跟踪系统采用主动的太阳光信号采集器与相应的控制和驱动结构,实现了对聚光器和导光镜的准确跟踪调整。
2.3.1 太阳光极轴式自动跟踪系统
这种极轴式太阳光自动跟踪装置,包括太阳时角跟踪机构、太阳赤纬角跟踪机构以及聚光器。聚光器的受光面上安装有太阳光信号采集器;聚光器下端通过多段式轴连结构(包括上半段的旋转轴和下半段的主轴)固定,多段式轴连结构为聚光器提供太阳时角旋转和赤纬角调节的自由度;太阳时角跟踪机构包括弧形轨道以及设置在弧形轨道上的轨道车[14](轨道基体的曲线形状为圆周的一部分,而相应的圆周半径即是轨道基体所处位置到主轴的距离),轨道车与弧形轨道之间设置有链条驱动机构,轨道车与聚光器的外侧面固定连接;太阳赤纬角跟踪机构设置在太阳时角跟踪机构下端,用于完成上下升降行程,以带动整个太阳时角跟踪机构和聚光器进行太阳赤纬角调节。
系统具体工作原理是:太阳时角方向采用链齿复合的方法,在距离主轴一定距离的位置拖着负载聚光器沿着与太阳每天升起和落下的运行轨迹相同的滑道运动,从而实现太阳时角的转动跟踪功能,可以解决地球本身自转过程中对太阳光的偏离问题,即时角调整。倾斜角方向则通过调节倾斜平台的倾斜角,使得安装于上面的聚光器同步转动跟踪太阳,有效解决了地球围绕太阳公转形成的对于赤纬方向的偏离即赤纬角调整。采用这种按照太阳每天运行轨迹制作弧度滑道的方法,大大减小了垂直方向电机的工作时间,节省了能源。
对于云天、阴天和雨天这种天气,上述光电跟踪系统就不能正常工作,因此在该系统中还需要以视日运动轨迹跟踪作为辅助跟踪。当出现特殊天气情况(阴天或者雨天等)时,光电跟踪自动停止工作,同时启动视日运动轨迹跟踪,使得聚光器可以按照程序预定的运动轨迹转动;当光电传感器可以再次采集到太阳光信息时,视日运动轨迹跟踪停止,同时光电跟踪自动启动。其控制原理图如图7所示。对于早晚聚光器跟踪的启动和停止,根据实际情况设定为早上某一时刻聚光器开始自动跟踪,晚上某一时刻停止跟踪并把聚光器还原到早晨开始跟踪时的位置,实现了聚光器对太阳光的实时跟踪。

图7 太阳光极轴式自动跟踪控制原理Fig.7 Schematic of polar-axis type automatic tracking system for sunlight
2.3.2 导光镜自动调整系统
在该隧道增强照明系统中须借助导光镜把方向时刻变化的高亮度平行太阳光按照固定方向导入隧道顶部,因此其自动控制系统的作用,就是使得导光镜始终根据增强型平行太阳光的方向调整导光镜的方向。
在该调整系统中,包括太阳光信号采集器、单片机和对应的驱动装置等。太阳光信号采集器安装于入射截面上且其光轴必须与入射至隧道顶部的太阳光光轴重合,太阳光信号采集器将采集到的信息传送给单片机,并且通过单片机控制导光镜的正确旋转(包括方位角调整和高度角调整),使得增强型的平行太阳光始终能够准确反射至隧道顶部的反射薄膜。同聚光器对太阳光的跟踪一样,本系统还须配备相应的辅助调整装置。当没有增强型平行太阳光入射到导光镜时,应使导光镜按照设定的运动轨迹动作,保证异常情况结束时(如太阳重新从云中出来时刻)导光镜对增强型的平行太阳光进行准确的反射。通过这两种跟踪调整方式相互配合来调节导光镜的位置,从而把太阳光实时准确高效率地输送到隧道顶部。
3 结论
本文在分析隧道增强照明系统技术要求的基础上,提出了一种通过太阳光的汇聚和光路变换后,在空气中高效率传输并直接用于隧道增强照明系统的太阳能应用新方法。通过实验证明,这种增强照明系统不但无须光导纤维或者导光管使得传输效率提高40%左右,同时使系统成本降低了近2/3,而且其本身固有的特点满足了隧道增强照明亮度自适应隧道外太阳光强度的技术要求,同时又回避了太阳光直接照明系统在实际应用过程中时有时无不稳定的致命缺陷。又因为配备了高精度高可靠性的极轴式跟踪系统和导光镜自动调整系统,使得太阳光实时传送至隧道进出口区段路面,实现增强照明系统总是处于最佳的工作状态,从而获得良好的照度均匀度来满足隧道进出口段的增强照明。该系统也为太阳能在白天需要照明的地下工程建筑如地下车库等推广应用提供了技术保障。
[1] JTJ026.1-1999.公路隧道通风照明设计规范[S].北京:中华人民共和国交通部,1999.
JTJ026.1-1999.Specifications for design of ventilation and lighting of highway tunnel [S].Beijing: China Communications Press, 1999. (in Chinese)
[2] 宁铎,张东煜.阳光输送机的研究[J].陕西科技大学学报,2005,23(1):45-47.
NING Duo, ZHANG Dong-yu. Sunlight transmitter[J].Journal of Shanxi University of Scince & Technology,2005,23(1):45-47.(in Chinese with an English abstract)
[3] 吴涛.太阳输送机的研制与改进[D].西安:陕西科技大学,2012.
WU Tao. Research and development of sunlight conveyer[D].Xi’an: Shanxi University of Science & Technology,2012. (in Chinese)
[4] 蔡春平.光纤折射率的依赖因素[J].应用光学,2000,21(5):13-18.
CAI Chun-ping. Dependent factor of refractiveIndex in fiberes[J].Journal of Applied Optics, 2000,21(5):13-18. (in Chinese with an English abstract)
[5] 刘名芳.太阳能LED隧道照明系统设计[D].大连:大连理工大学,2012.
LIU Ming-fang. Design of solar LED tunnel illumination system[D].Dalian:Dalian University of Technology,2012. (in Chinese)
[6] SANSONI P,FONTANI D,FRANCINI F. Optical design and development of fiber coupled compact solar collectors [J].Lighting Research &Technology,2007,39(1):17-30.
[7] 陕西科技大学.透射式太阳光隧道直接增强照明的装置:中国,201210086376[P].2012-08-01.
Shanxi University of Science & Technology. The equipment of transmissive sunlight direct tunnel enhanced illumination:Chnia,201210086376[P].2012- 08-01. (in Chinese)
[8] 宁铎,刘飞航.免跟踪透射式太阳聚光器的设计[J].光子学报,2008,37(11):2284-2287.
NING Duo, LIU Fei-hang.Non-tracking transmission solar concentrators[J].Acta Photonica Sinica,2008,37(11): 2284-2287. (in Chinese with an English abstract)
[9] 江韬.用于光伏系统新型菲涅耳线聚焦聚光透镜设计[J].光子学报,2002,31(2):197-199.
JIANG Tao. A new design of line-focus Fresnel lens for photovoltaic power system [J].Acta Photonica Sinica,2002,31(2):197-199. (in Chinese with an English abstract)
[10] 吴贺立.菲涅尔太阳能聚光器研[D].武汉:武汉理工大学,2010.
WU He-li.The research of Fresnel concentrator for HCPV[D].Wuhan :Wuhan University of Techno- logy,2010. (in Chinese)
[11] 余峰,何烨.四象限光电检测系统的定位算法研究及改进[J].应用光学,2008, 29(4):493-497.
YU Feng,HE Ye. Improvement of positioning algorithm for four-quadrant optoelectronic detection system[J].Journal of Applied Optics,2008, 29(4):493-497. (in Chinese with an English abstract)
[12] 宁铎,吴涛.聚光型粗细调互补阳光信号采集器的研制[J].光子学报,2011,40(6):878-882.
NING Duo,WU Tao.Signal acquisition device of concentrating solar rough and fine adjustment complementary [J].Acta Photonica Sinica,2011,40 (6):878-882. (in Chinese with an English abstract)
[13] 王尚文,高 伟,黄树红.混合双轴太阳自动跟踪装置的研究[J].可再生能源,2007,25(6):10-13. (in Chinese with an English abstract)
WANG Shang-wen,GAO Wei,HUANG Shu-hong. Research on the mixed two-axes sun tracker[J].Renewable Energy Resources,2007,25(6):10-13.
[14] 陕西科技大学.太阳光极轴式自动跟踪器:中国,201210090712[P].2012-07-25.
Shanxi University of Science & Technology. Auto-tracker for sunlight with polar axis: China,201210090712[P].2012-07-25. (in Chinese)
猜你喜欢
小天使·一年级语数英综合(2021年8期)2021-08-17
东方考古(2021年0期)2021-07-22
摄影之友(影像视觉)(2020年2期)2021-01-14
文萃报·周二版(2019年48期)2019-09-10
中学生数理化·八年级物理人教版(2018年12期)2019-01-31
中国市场(2016年45期)2016-05-17
医学美学美容·中旬刊(2015年2期)2015-10-21
少年科学(2015年6期)2015-07-01
太阳能(2015年6期)2015-02-28
小哥白尼·趣味科学画报(2009年4期)2009-05-11
