
一种光谱偏振成像系统设计及应用
2014-03-27 01:51:57何梓健王科伟马丽芳汪家春赵大鹏王启超
应用光学 2014年2期
何梓健 ,王科伟,马丽芳,汪家春,赵大鹏,王启超
(1.安徽省红外与低温等离子体重点实验室,安徽 合肥 230037; 2.中国人民解放军总参陆航部驻西安军事代表室,陕西 西安 710065;3.陆军军官学院 信息化弹药研究所,安徽 合肥230031)
引言
偏振探测作为强度探测的有益补充,能够提供关于目标与背景的更多信息。利用目标和背景的偏振特性差异,可以抑制复杂背景噪声,提高目标探测与识别的准确度[1-3],因此,在目标探测领域具有广泛的应用前景和经济价值,是目前国内外研究的热点。早在20世纪90年代,关于遥感中偏振信息的重要性就已得到美国国家航空航天局(NASA)的认可[4]。近年来,国内外多个研究小组开展了偏振成像探测系统的设计研究[5-7],如基于液晶可调滤光器(LCTF)的光谱偏振成像探测系统[8]以及基于液晶相位可变延迟器(LCVR)和声光可调滤波器(AOTF) 的光谱偏振成像探测系统[9]。但这些昂贵的可调光学器件加入到光路中,会对入射光造成较大的衰减,提高了对CCD相机的要求,增加了系统设计的难度和成本。此外,由于一般物体在相邻光谱范围内,其光谱偏振特性变化并不大,因而基于这些可调器件的多光谱或超光谱偏振成像探测系统,还可能会造成偏振探测结果的信息冗余。为此,本文设计了一种基于电动转轮的光谱偏振成像探测系统,系统结构简单,可以在事先固定的6个波长上实现光谱偏振成像探测,探测精度较高。
1 偏振成像探测原理
光的偏振态的描述通常采用Stokes矢量。Stokes矢量[10]定义为
S=[I,Q,U,V]T
(1)
式中:I表示总的光强;Q表示水平线偏振分量与垂直线偏振分量之差;U表示45°线偏振分量与135°线偏振分量之差;V表示右旋圆偏振分量与左旋圆偏振分量之差。在可见光和近红外波段,非金属目标对太阳辐射的反射光中圆偏振成分很少,可以认为V近似为0。因此,对于一束地物的散射光,要完全确定其偏振状态,只需确定Stokes矢量中的I、Q和U3个参量即可。I、Q和U分量一般通过测量0°、60°和120° 3个偏振方向的光强后处理得到:
(2)
从而,利用Stokes矢量定义可以计算得到地物表面的偏振度P和偏振角θ:
(3)
因此,为了实现对地物偏振成像探测,仅需获得地物在3个不同偏振方向上的相对光强图像,然后按照逐像元计算即可得到场景的I、Q和U图像、偏振度图像以及偏振角图像。
2 偏振成像系统设计与测试
2.1 系统组成
图2为系统结构示意图,系统由偏振片及其旋转台、滤光片及其旋转台、CCD以及图像采集单元组成。采用旋转偏振片的方式对入射光的偏振状态进行调制,通过旋转滤光片进行光谱选择。偏振片和滤光片轮均安装在电动旋转台上,通过电脑控制2个旋转台的转动角度,其中偏振片分别转动到30°、60°和120°。滤光片轮能安装6个光谱滤光片,按照60°转动,滤光片的光谱范围可以根据系统的需要,在可见光与近红外波段内适当选取。整个系统被固定在三脚架平台上,可以根据需要在俯仰和水平方向上调节。考虑到本文所使用CCD相机的光谱响应范围为400nm~1 000nm,这里选择的滤光片中心波长分别为442nm、545.5nm、670.5nm、740.5nm、850.5nm和906.5nm,半波带宽在10nm左右。
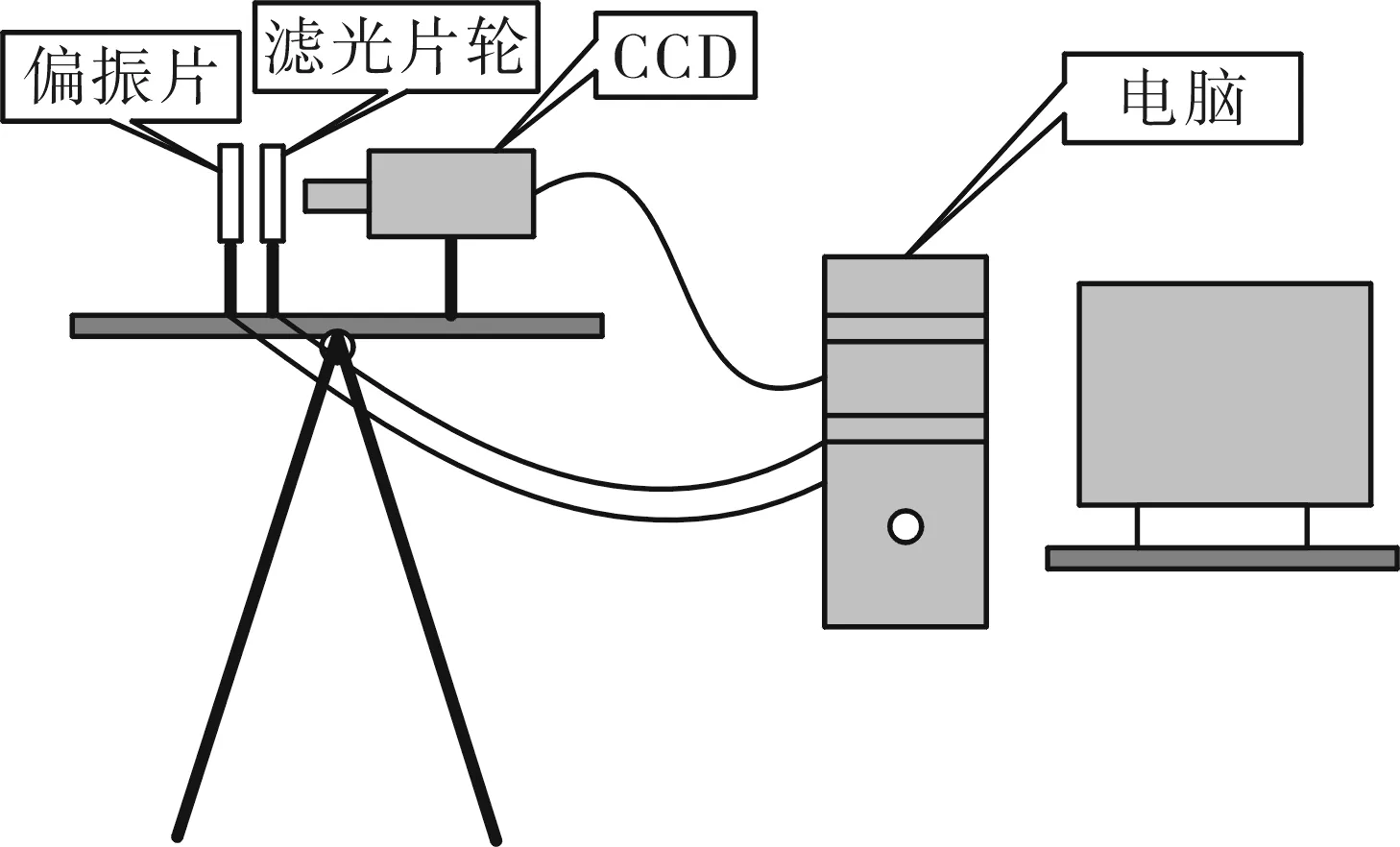
图1 光谱偏振探测系统结构示意图Fig.1 Schematic diagram of spectral polarization detection system
2.2 系统探测精度分析
为了对本系统的偏振度探测精度进行分析,利用亮度可调的卤钨灯对探测系统进行实验测试,实验原理如图2所示。在卤钨灯出射窗口处放置一块毛玻璃和一块线偏振片,偏振片的偏振方向为任意方向。卤钨灯所发出的光经毛玻璃散射后形成一个面积较大的光斑,再经过偏振片后,出射光近似为线偏振光。此时,偏振片上的光斑就可以近似认为是偏振度为1的面目标。在暗室内,利用本文所设计的光谱偏振成像探测系统对毛玻璃上的光斑进行成像,分别采集0°、60°和120° 3个偏振方向上场景的光谱强度图像,处理后得到场景的偏振度图像。可以预见,如果探测系统工作正常,在处理所得的偏振度图像中,理想情况下,光斑的偏振度应为1。图3为3个偏振方向上场景的光谱强度图像,成像探测系统所使用的滤光片中心波长为670.5nm,图4为处理所得到的光强图和偏振度图像。
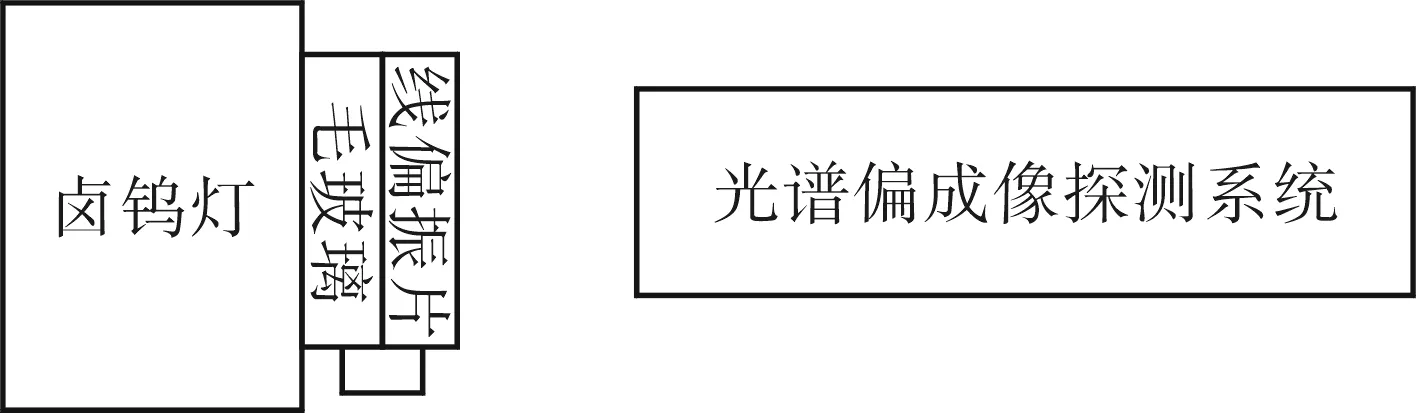
图2 实验原理图Fig.2 Principle diagram of experiment
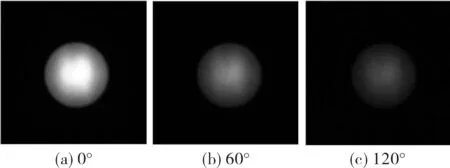
图3 3个偏振方向上场景的光谱强度图像Fig.3 Spectral intensity images of scene on 3 polarization directions
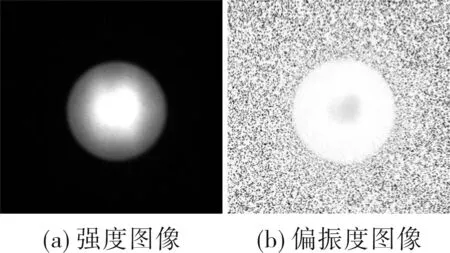
图4 处理所得到的光强图像和偏振度图像Fig.4 Experimental results
由图4可以看出,由于光斑的光强分布不均匀,因而在强度图像中其灰度值呈现一定的分布;而在偏振度图像中,光斑偏振度的测量值较大,且较为一致,因而在偏振度图像中呈现出一个比较均匀的圆形白色区域。此外,在强度图像中,背景区域的灰度值很小,在0值附近;经过处理后,在偏振度图像中却出现了像噪声一样的背景,但噪声却又没有在光斑的圆形区域内出现。为了进一步说明情况,在3幅强度图像中的不同位置,分别获得背景与光斑所对应的灰度值,并利用这些灰度值计算出其相应位置的偏振度值,具体结果如表1所示,其中坐标为(45,33),(43,120),(238,40),(214,245)的像素点位于背景图像中,坐标为(111,110),(186,119),(115,170),(186,155) 的像素点位于光斑图像中。
表1强度图像中不同位置处的灰度值及其处理所得到的偏振度
Table1Grayvaluesatdifferentpositionsinintensityimagesandpolarizationdegreesacquiredfromthem
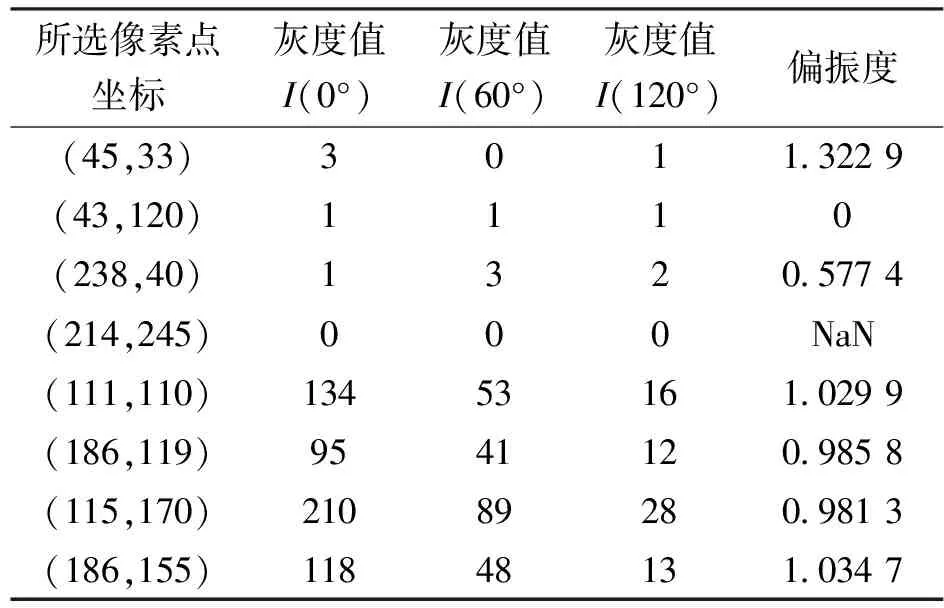
所选像素点坐标灰度值I(0°)灰度值I(60°)灰度值I(120°)偏振度(45,33)3011 3229(43,120)1110(238,40)1320 5774(214,245)000NaN(111,110)13453161 0299(186,119)9541120 9858(115,170)21089280 9813(186,155)11848131 0347
从表1可以看出,背景在强度图像中的灰度值很小,理论上,背景处无光强,在强度图像中其灰度值应为0,因此,实际图像中背景的灰度值可以认为主要来自于CCD相机自身的背景噪声。由于背景噪声在强度图像中的灰度值起伏毫无规律可言,因而造成背景在偏振度图像中产生像噪声一样的起伏;而在光斑处,由于入射光产生的灰度值较大,减小了噪声对探测结果的影响,因而光斑位置偏振度的探测结果与理论值较为接近。从计算所得的结果来看,光斑偏振度的计算值和理论值之间的误差不超过4%,可以认为系统的探测精度能达到4%以内。
通过上面的实验可以看出,对于本文所设计的光谱偏振成像探测系统,光路中只使用了一个滤光片和线偏振片,结构简单、易于实现、成本较低,且具有较高的探测精度。
3 应用前景分析
利用本文所设计的光谱偏振成像探测系统,在阴天天气条件下,对林地型三色伪装涂层目标进行了实验探测,图5为实验所得到的光强图像和偏振度图像,背景为草地,纸盒子里为干燥的土壤,光强图中标识出了三色涂层的大致分布区域。系统所使用的滤光片中心波长为545.5 nm,探测角度为75°。
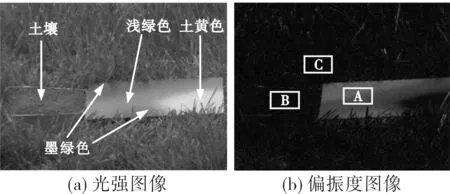
图5 在545.5 nm波长处,伪装涂层目标的光强图像和偏振度图像Fig.5 Experimental results at 545.5nm
从图5可以看出,在545.5 nm波长处,光谱反射率较大的土黄色伪装涂层,在光强图中呈较亮的区域,但在偏振度图像中,其偏振度较小,因此呈黑色区域;而对于光谱反射率均较小的墨绿色和浅绿色2种伪装涂层,如图中的区域A,在光强图中呈较暗的区域,但在偏振度图像中,区域A的偏振度平均值为0.33,因而在偏振度图像中该区域亮度较高。对于草地和土壤背景,如图中的区域B和区域C,其光谱偏振度的平均值为0.038和0.047,在偏振度图像中区域亮度均较为昏暗。因此,虽然在偏振度图像中,图像的可视性会有一定的下降,但由于草地和土壤的偏振度与目标偏振度差异较大,如区域A与区域B、C的偏振度平均值的差值分别达到0.292和0.283,在图像中表现为伪装涂层目标显得更加突出。可以看出,偏振成像探测作为一种新的反伪装探测手段,可以有效地提高对传统伪装涂层目标的探测和识别概率。同时,利用涂层在光强图像和偏振度图像中的明暗区域正好相反的变化规律,可以对光强图像和偏振度图像进行融合,将偏振度信息作为光强信息的补充,以提高对伪装涂层目标的探测和识别能力。
以上利用本文所设计光谱偏振成像系统在545.5 nm波长处对林地型三色伪装涂层目标进行了实验探测。此外,由于目标的偏振特性受探测波长、方位角以及俯仰角等多种因素的影响,为了获得伪装涂层目标偏振特性的规律,可以利用该系统在不同探测条件下方便地完成多种实验,从而为不同条件下伪装涂层目标的探测与识别提供依据。
4 结束语
本文设计了一种基于电调谐方式的光谱偏振成像探测系统。该系统可以在事先固定的六个波长上实现光谱偏振成像探测。通过亮度可调的卤钨灯对探测系统进行实验验证,系统具有高达4%的探测精度。最后利用所设计的光谱偏振成像探测系统对地物背景中的迷彩伪装板进行了探测实验,通过分析所得的偏振图像得出,目标与草地及土壤背景的偏振度差值分别达到0.292和0.283,在图像中目标显得较为明显。
[1] 弓洁琼,詹海刚,刘大召.遥感遥测中偏振信息的研究进展[J].光谱学与光谱分析,2010, 30(4):1088-1095.
GONG Jie-qiong, ZHANG Hai-gang, LIU Da-zhao. A review on polarization information in the remote Sensing dection[J]. Spectroscopy and Spectral Analysis, 2010, 30(4):1088-1095.(in Chinese with an English abstract)
[2] 王海晏,杨廷梧,安毓英,等.激光水下偏振特性用于目标图像探测[J].光子学报,2003,32(1):9-13.
WANG Hai-yan,YANG Ting-wu,AN Yu-ying. The usage of polarity character of underwater laser beam in target image detection[J].Acta Photonica Sinica, 2003,32(1):9-13.(in Chinese with an English abstract)
[3] CORNELL S,CHUN L,FIROOZA S.Target recognition study using polarimetric laser radar[J].SPIE,2001,5426:274-284.
[4] A Subsidiary of Hughes Aircraft Company. Earth observing scanning polarimeter phase-B[R]. US: National Aeronautics and Space Administration Gadard Space Flight Center, NASS-30756, 1990.
[5] 杨之文.偏振光谱的测量及研究进展[J].光谱实验室.2003, 20(8):815-820.
YANG Zhi-wen. Measurement and achievement of polarimetric spectrum[J]. Chinese Journal of Spectroscopy Laboratory.2003,20(8):815-820.(in Chinese with an English abstract)
[6] 张绪国,江月松,赵一鸣. 偏振成像在目标探测中的应用[J]. 光电工程,2008,35(12):59-60.
ZHANG Xu-guo, JIANG Yue-song, ZHAO Yi-ming. Application of polarimetric imaging in target detection[J]. Opto-Electronic Engineering ,2008,35(12):56-60.
[7] 王军,丁娜,李建军,等. 红外偏振成像对伪装目标的探测识别研究[J].应用光学, 2012, 33(3):441-445.
WANG Jun, JING Na, Li Jian-jun,et al. Infrared polarization imaging:detection and recognition of camouflage target[J]. Journal of Applied Opitcs, 2012, 33(3):441-445.
[8] HOMMA K, SHINGU H, YAMAOTO H, et al. Outdoor experiments of LCTF spectropolarimeters for earth observation[J]. SPIE, 2004, 5234:628-637.
[9] GUPTA N. Remote sensing using hyperspcctral and polarization images[J]. SPIE, 2002, 4574:184-192.
[10] 孔凡美,李国华,彭捍东.偏光显微镜中偏振态的理论分析[J].应用光学,2008,29(5):821-824.
KONG Fan-mei, LI Guo-hua, PENG Han-dong. Theoretical analysis of polarization state for polarizing microscope[J]. Journal of Applied Opitcs, 2008,29(5):821-824.(in Chinese with an English abstract)
猜你喜欢
微处理机(2019年5期)2019-11-06 00:28:02
民用飞机设计与研究(2019年4期)2019-05-21 07:21:30
成都信息工程大学学报(2018年4期)2019-01-23 06:57:24
电子制作(2018年23期)2018-12-26 01:01:02
传感器与微系统(2018年7期)2018-08-29 00:44:20
光学精密工程(2016年3期)2016-11-07 09:03:38
光学精密工程(2016年1期)2016-11-07 09:00:59
兵器装备工程学报(2016年9期)2016-10-20 10:26:16
激光与红外(2015年8期)2015-03-23 06:07:08
大学物理实验(2013年3期)2013-10-25 02:47:20
