
小视场轻型星敏感器在白天测星中的应用
2014-03-27 01:51:57刘效东张补生
应用光学 2014年2期
贺 磊,张 平,刘效东,张补生,陈 巍
(国营第五五九厂,江苏 无锡 214035)
引言
星敏感器是精度最高的姿态敏感器之一[1],它通过探测天球上不同位置的恒星来确定飞行器在惯性坐标系的三轴姿态。在航天领域,大口径宽视场星敏感器的应用已经较为成熟,其通过运用“多星矢量定位技术”可实现精确定位。而机载天文导航的应用则受到了一定的限制,这主要是因为在一定飞行高度内,受白天大气散射和云层背景的影响,使白天观测恒星十分困难,导致“多星矢量定位技术”在白天大气层内根本无法使用[2]。然而小视场轻型星敏感器通过系统参数的匹配设计、优化,可在白天获取恒星图像。作者通过使用自主研发的小视场轻型星敏感器进行了白天观星实验,验证了其可行性,为机载系统的进一步发展提供经验。
1 星敏感器的白天观星原理
为了使星敏感器在大气层内白天可以探测恒星,我们必须对星敏感器进行专门设计。根据星光与大气层的物理特性以及星敏感器的构造特点,可从如下两方面考虑:
1) 利用恒星与天空背景的光谱特性差别,采用选择探测器光谱特性和添加滤色镜等方法,将星敏感器的工作波段限定在某个有利的区域,在保证星光能量损失不大的前提下尽量抑制背景,以便提高星光辐射的相对强度。图1给出了晴天时天空背景光与G、K、M不同光谱类型恒星的光谱分布曲线,从图中可以看出,晴天时天空背景光以短波为主,峰值大约在0.45 μm~0.55 μm波段,而G、K、M星虽然光谱分布曲线不尽一致,但其共同的特点是在短波段均较弱,而在长波段均较强,峰值在0.8 μm左右(有关天文资料表明,很多恒星具有与G、K、M星类似的光谱特性)[3]。因此,可以通过光谱滤波提高恒星的探测概率。
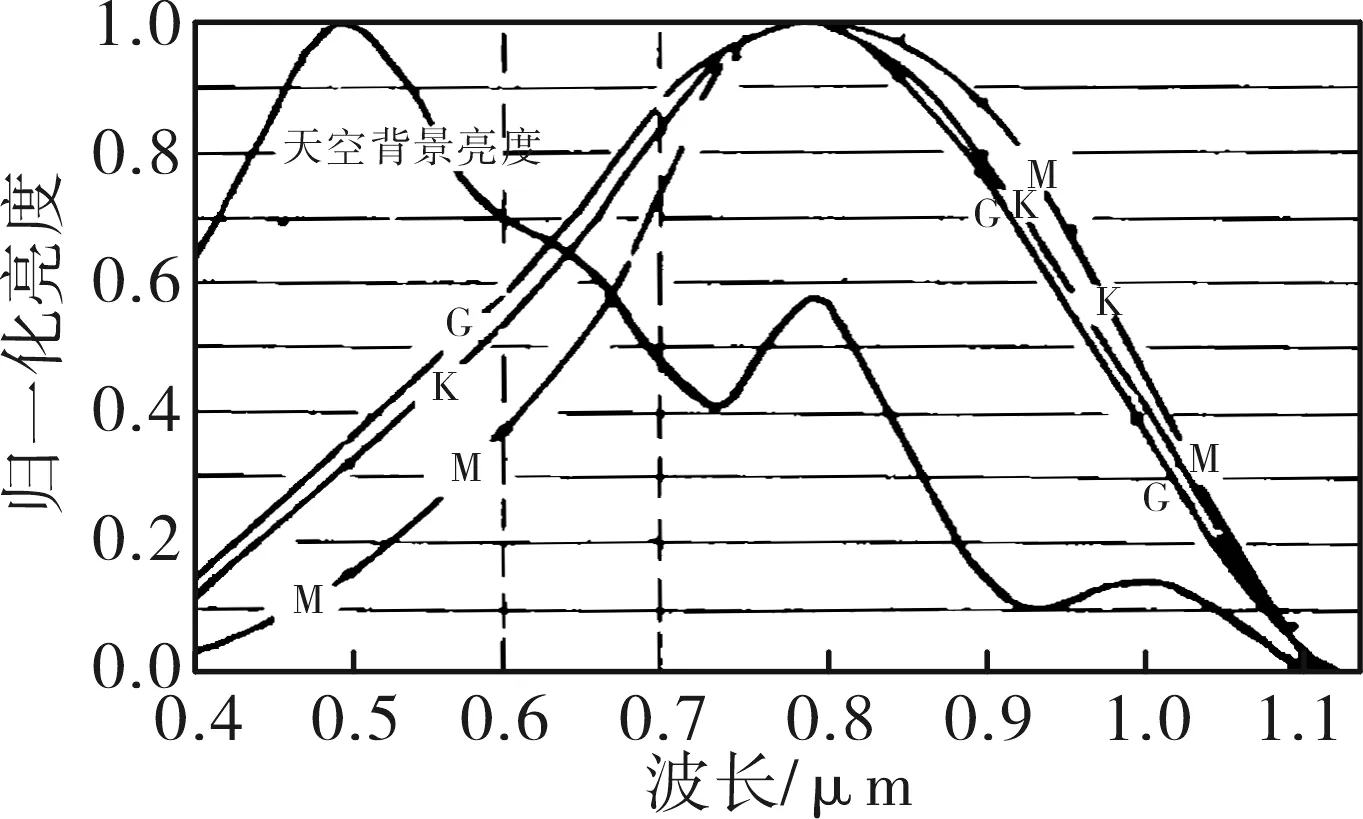
图1 光谱型星有效光子及大气光有效光子分布曲线Fig.1 Distribution curves of efficient photon for M,K,G stellars and atmosphere light
2) 利用恒星和天空两者不同的光学特性,即恒星是理想的点光源,而天空可看作朗伯型面光源,通过合理选择星敏感器的焦距、F#、工作波段、CCD量子效率、像素大小、井深等系统参数,设法提高星光能量在一个像素中所占的比例,进而提高恒星的探测概率,并建立数学模型进行仿真,如图2所示。

图2 仿真界面Fig.2 Simulation interface
在仿真界面中可输入物镜焦距、口径、信噪比、透过率、探测器参数、太阳高角、海拔高度、恒星光谱类型等相关数据,经迭代计算可得出极限星等值。图2中的曲线由左至右依次为恒星光谱曲线、大气透过率曲线及探测器QE(量子效率)曲线、天空背景亮度曲线。
2 小视场轻型星敏感器
根据经验和理论分析计算,我们自主研发了小视场轻型星敏感器,视场为2°×1.5°,具有像质好、集光能力强、体积小、质量轻等特点。其设计目标为:白天、晴朗无云、大气能见度10 km以上、在海拔3 km处可探测3等星。在设计中运用了光谱滤波技术[4]、消杂光技术、装配定中心技术[5]、恒星图像质心提取技术、光学系统无热化技术、系统小型化技术,通过图像处理算法,提高了图像的对比度,使恒星更容易被探测。
星敏感器主要由遮光罩、光学系统、CCD、数据处理软件、伺服系统及综合控制系统组成,如图3所示。恒星经光学系统成像在CCD光敏面上,并由CCD实现光电转换,输出电信号经后续软件、电路、伺服处理,完成星目标提取、定位、坐标转换等一系列工作,从而确定星敏感器相对于惯性坐标系的指向。
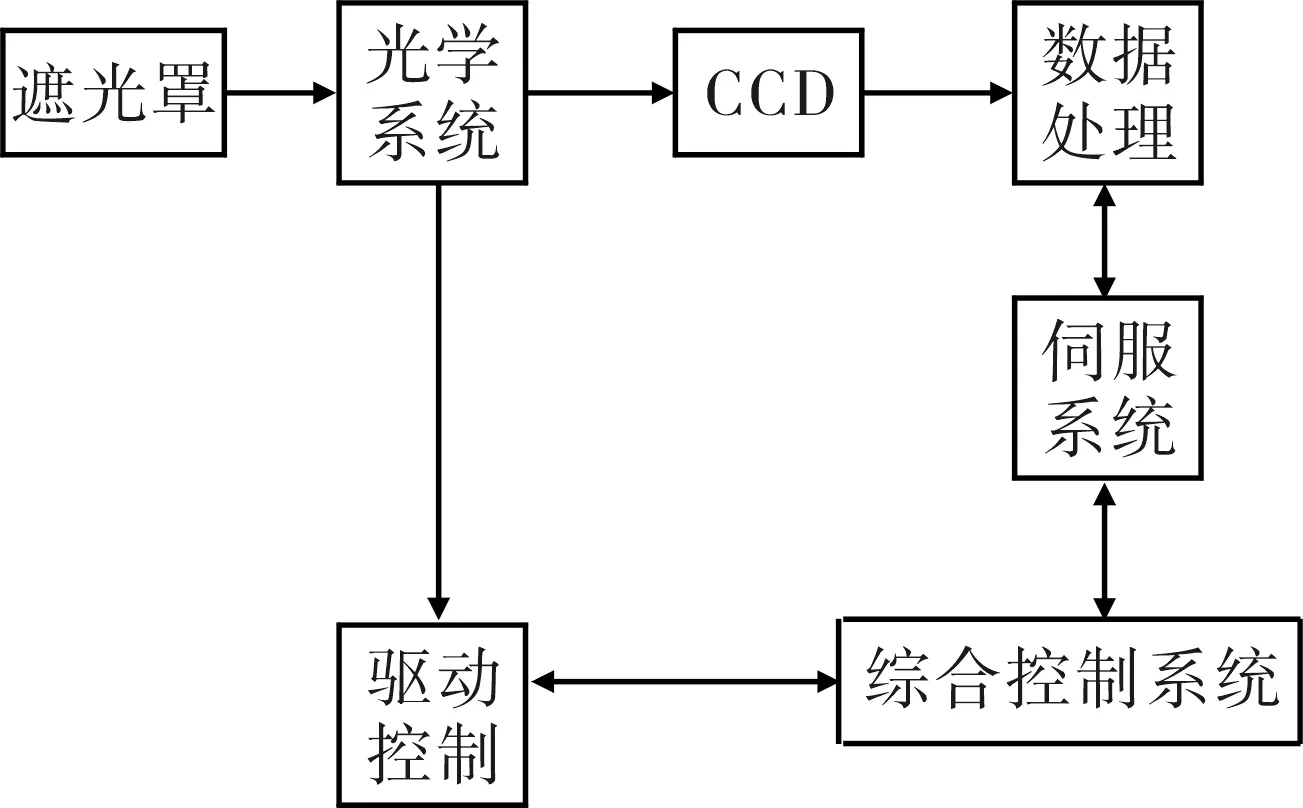
图3 星敏感器组成Fig.3 Constitution of star sensor
3 实验
2013年1月上旬,在云南香格里拉高海拔地区进行白天观星实验,分别对环境数据、恒星光谱差异、观测高度角和太阳规避角等因素对极限星等探测的影响做了大量实验验证。
3.1 实验环境
2013年1月11日至17日,我们在香格里拉地区进行了白天观星实验,使用望远亮度计、能见度仪、温度传感器等设备对实验环境进行了全程监测,详细记录实验数据并绘制实时监测曲线。图4为实验现场,时间8:00到17:00,海拔3.2 km。

图4 实验现场Fig.4 Experiment on site
1月13日在晴朗无云、温度-5 ℃~+3 ℃的天气条件下使用望远亮度计所测量的天顶亮度曲线如图5所示。由图5可知,在11:00左右,天顶亮度达到最大值约为2 600 cd/m2,随后逐渐下降至2 000 cd/m2保持稳定。随着季节、气候、云、雾、雨雪等环境因素的变化,天顶亮度随之改变,实验中发现天空云层较多时,天顶亮度最高可达3 300 cd/m2。

图5 天顶亮度曲线Fig.5 Zenith luminance curve
使用能见度仪所测量的大气能见度曲线如图6所示。由图6可知,大气能见度基本保持在10 km左右,符合实验环境要求。图6中出现的奇异点为实验现场出现的烟、雾导致。
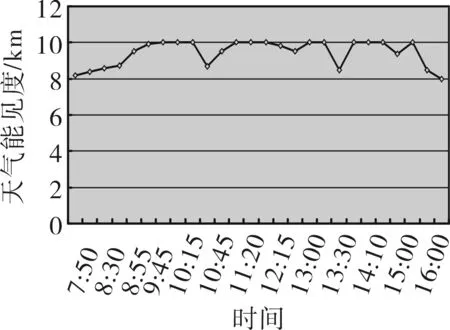
图6 大气能见度曲线Fig.6 Atmosphere visibility curve
3.2 恒星光谱差异
天文学按照恒星的温度从高到低把星光的光谱分成O、B、A、F、G、K、M 7大类型,每个大类型中又用数字表示为10个次类型。每种类型的实际光谱的形状(峰值辐射波长位置)取决于该种恒星的有效温度。温度越高,辐射峰值波长越短;温度越低,辐射峰值波长越长[6]。随着温度的降低,大气背景辐射则随波长的增大而减小,可见温度低的恒星有利于星敏感器的探测。为了验证恒星光谱差异对极限星等探测的影响,我们在相同实验环境下对不同光谱类型的恒星进行了观测,观测记录见表1。对不同光谱类型的恒星观测,温度低的恒星可观测的极限星等高。由表1可知,星敏感器所能探测的极限星等为3.8等,光谱类型为M2II+_B6。图7为星号为116727的恒星观测图像,从图像中可以发现,恒星图像的信噪比、对比度较高,符合目标提取的需求。
表1恒星光谱差异
Table1Differencesamongspectraofstars
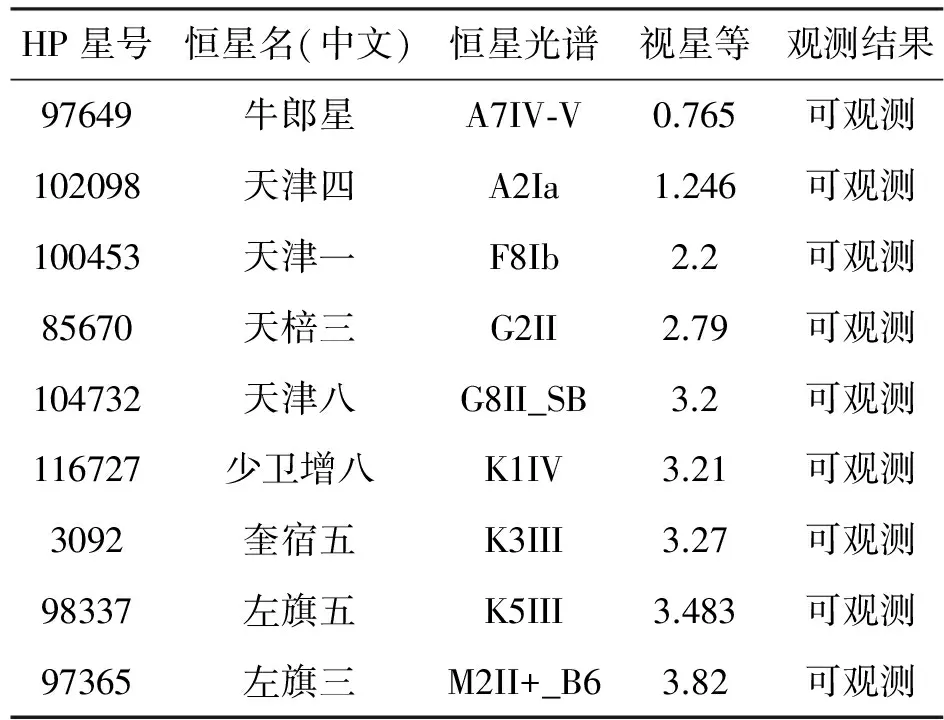
HP星号恒星名(中文)恒星光谱视星等观测结果97649牛郎星A7IV⁃V0.765可观测102098天津四A2Ia1.246可观测100453天津一F8Ib2.2可观测85670天棓三G2II2.79可观测104732天津八G8II_SB3.2可观测116727少卫增八K1IV3.21可观测3092奎宿五K3III3.27可观测98337左旗五K5III3.483可观测97365左旗三M2II+_B63.82可观测

图7 恒星图像(116727)Fig.7 Star image(116727)
3.3 观测高度角和太阳规避角
随着所观测恒星的观测高度角或太阳规避角的增大,星敏感器可探测的极限星等也随之提高。这主要是因为大气背景辐射随观测高度角或太阳规避角的增大而减小,大气透过率随观测高度角的增大而增加,有利于增大恒星与背景的对比度,提高星敏感器探测能力。表2为不同观测高度角和太阳规避角的观测记录。由表2可知,当太阳规避角小于30°、观测高度角小于32°时,星敏感器的探测能力明显下降。
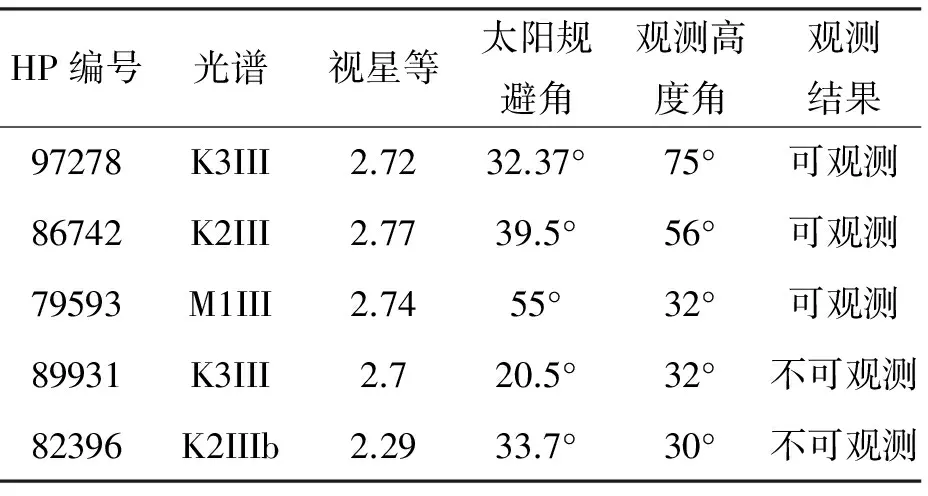
表2 观测高度角和太阳规避角Table 2 Observed altitude angle and avoiding angle of sun solar around
4 结论
综上所述,通过合理选择光学参数,优化设计光学系统,小视场轻型星敏感器可实现白天对恒星的地面观测,并进行了观星实验,验证了其可行性。为星敏感器大气层内全天候使用提供了依据。该小视场轻型星敏感器可应用于高海拔地区白天地面自主定位,机载天文导航等高精度系统。
[1] 吴峰,沈为民.轻小型星敏感器光学系统的设计[J]. 光子学报,2004,33(11),1336-1338.
WU Feng,SHEN Wei-min. Design of a light and compact optical system for star sensors[J].Acta Photonica Sinica,2004,33(11) :1336-1338.(in Chinese with an English abstract)
[2] 何炬.国外天文导航技术发展综述[M].船舶科学技术,2005,27(5):92-95.
HE Ju. Survey of oversea celestial navigation technology development[J]. Ship Science and Technology, 2005,27(5),92-95. (in Chinese with an English abstract)
[3] 徐维安.光谱滤波装置在白天测星中的应用[J].光学精密工程,1996,4(4):84-87.
XU Wei-an. Application of spectral filter device in measuring stellar in daytime[J]. Optics and Precision Engineering, 1996,4(4):84-87. (in Chinese with an English abstract)
[4] 何成,朱耆祥.白天非自发光天体目标探测技术研究[J].飞行器测控学报,1993(2):10-15.
HE Cheng, ZHU Qi-xiang. The non self luminous celestial object detection technology research[J]. Journal of Spacecraft TT&C Technology, 1993(2):10-15.(in Chinese with an English abstract)
[5] YODER P R, Jr.光机系统设计[M].周海宪,程云芳,译.北京:机械工业出版社, 2008.
YODER P R,Jr. Opto-mechanical systems design[J].Translated by ZHOU Hai-xian and CHENG Yun-fang. Beijing:China Machine Press, 2008.(in Chinese)
[6] 陈秀红,魏合理.星敏感器白天观星的对比度分析[J].大气与环境光学学报,2008,3(1):29-35.
CHEN Xiu-hong,WEI He-li.Analysis of the contrast of star to sky background during daytime for star sensor[J].Journal of Atmospheric and Environmental Optics,2008, 3(1):29-35. (in Chinese with an English abstract)
猜你喜欢
中国光学(2021年6期)2021-11-25 07:48:32
小哥白尼(神奇星球)(2021年11期)2021-03-08 09:00:24
中国医疗设备(2019年1期)2019-01-15 12:10:54
百科探秘·航空航天(2018年12期)2018-12-29 03:57:56
天天爱科学(2018年10期)2018-10-26 07:36:40
奥秘(2018年10期)2018-10-25 05:38:56
天天爱科学(2018年4期)2018-09-10 23:13:04
天天爱科学(2018年3期)2018-09-10 00:23:56
天天爱科学(2017年10期)2017-10-13 07:53:13
激光与红外(2015年10期)2015-03-23 06:07:18
