
基于Matlab/GUI异步电动机人机界面设计
2014-03-26 03:47:12谢丽蓉
实验技术与管理 2014年8期
谢丽蓉
(新疆大学 电气工程学院,新疆 乌鲁木齐 830047)
异步电动机因其结构简单、制造方便、运行可靠、价格低、效率高等优点,在各行业得到了广泛应用[1]。针对电动机铭牌数据,可采用转矩实用表达式绘制机械特性曲线。目前教材中给出的转矩实用表达式,适用条件是电动机参数恒定,对绕线式电动机是可以直接使用,而对鼠笼电动机则不然,若直接将其应用于鼠笼异步电动机,计算和分析结果存在很大的误差,需对实用表达式进行修正。
文献[2-3]提出了一种新颖思想和方法,采用无限个不同转差率时的绕线式异步电动机机械特性曲线的临界点连续变动,来构成鼠笼式异步电动机机械特性方程;文献[4]根据鼠笼式异步电动机机械特性修正方程,对电动机起动特性进行了分析。
Matlab/GUI是一种新型的图形用户界面开发方式,通过此界面可以很方便地达到一些特定控制的操作,简单易学而又功能强大。既能嵌入已有的仿真程序,又能把仿真的图形化结果以人机交互的动态方式呈现给用户,使用者不需要知道代码的具体内容,只要了解具体操作步骤,即可方便地操作界面[5-6]。
本文针对机械特性实用表达式和修正表达式,用M文件编写绘制机械特性的程序;采用Matlab/Simulink基本元件,构建异步电动机起动特性仿真模型,运用GUI设计开发程序界面[7-12]。
1 程序主界面
电动机特性曲线仿真平台的用户界面,运用Matlab提供的GUIDE来设计[7],内容包含绕线式异步电动机和鼠笼式异步电动机的机械特性、起动特性,兼顾转矩实用和修正表达式。异步电动机特性曲线绘制软件主界面见图1。
图1 三相异步电动机特性曲线绘制软件的主界面
当点击“机械特性”,出现下拉菜单,有绕线式异步电动机实用表达式、绕线式异步电动机修正表达式、鼠笼式异步电动机实用表达式、鼠笼式异步电动机修正表达式的选项,单击选项,便可出现相应的曲线绘制界面。
2 绕线式异步电动机的GUI平台设计

2.1 机械特性GUI平台
2.1.1 理论基础
绘制电动机的机械特性曲线,通常采用转矩实用表达式。 假定电动机“定子、转子绕组的阻抗参数不随转差率而变”,则异步电动机的转矩实用表达式[1]为
(1)
式中:T为电磁转矩;s为转差率;sm为临界转差率。
绕线式异步电动机能满足转矩实用表达式的假设条件,所以可按公式(1)进行仿真设计。
2.1.2 运行界面
按公式(1)编写绘制机械特性曲线的程序,得到的绕线式异步电动机机械特性的GUI界面见图2。

图2 基于实用表达式的绕线式异步电动机机械特性绘制界面
点击“加载实例”按钮,可将参数PN、nN、n0(理想空载转速)等数据显示在界面,同时可在Axes坐标轴对象中绘制出机械特性曲线。
在编辑框中输入电动机的PN、nN和f等数值,点击“绘制曲线”按钮,可以绘制出相应的机械特性曲线。
点击“退出界面”按钮,可退出此界面。
2.1.3 设计方法
(1) 编写M文件。通过GUIDE在用户GUI设计过程直接自动生成M文件的框架,编写函数代码,程序代码为:
PN=7.5;nN=925;p=3;f=50;km=2;
n0=60*f/p;
sN=(n0-nN)/n0;
TN=9550*PN/nN;
Tm=TN*km;
sm=sN*(km+sqrt(km.^2+1));
for i=1:1:100
s1=0.01*i;
n1=n0*(1-s);
T1=2*Tm/((s/sm)+(sm/s));
s(i)=s1;
T(i)=T1;
n(i)=n1;
end
plot(T,n)
grid on
(2) 加载实例。点击图2中“加载实例”按钮,将实例电动机的数据,通过后台编写程序,直接显示在GUI界面[7],“加载实例”的程序部分代码为:
PN=7.5;nN=925;km=2;p=3;f=50
set(handles.edit1,′string′,pN);
set(handles.edit2,′string′,nN);
…
(3) 参数输入。绘制不同电动机的特性曲线时,可以在图2中输入电动机的相关参数,后台程序需要获取用户所填写的参数,以便进行相应的运算[12]。“绘制曲线”按钮的Callback部分程序为:
PN=str2num(get(handles.edit1,′string′))
nN=str2num(get(handles.edit2,′string′))
2.2 起动特性GUI平台设计
异步电动机的转矩T与转速n的关系[1]为
(2)
电动机起动时转速为:
n′=n0(1-s)
(3)
根据公式(1)、(2)和(3),搭建的基于实用表达式的绕线式电动机起动特性Simulink模型[4]见图3。绘制绕线式异步电动机起动特性的GUI界面见图4。

图3 基于实用表达式的绕线式异步电动机仿真模型

图4 绕线式异步电动机起动特性曲线GUI界面
3 鼠笼式异步电动机的GUI平台设计
鼠笼式电动机给定铭牌数据:PN=4.5 kW;nN=1 440 r/min;Km=2;起动转矩系数Kst=1.4,Kst=Tst/TN,Tst为起动转矩;GD2=1.96 N·m2;n0=1 500 r/min。
公式(1)是在假定电动机“定子、转子绕组的阻抗参数不随转差率而变”的条件下推导出来的,实际上,鼠笼式异步电动机的转子导条受集肤效应影响,其参数和临界转差率是变化的[2]。因此,在鼠笼式异步电动机中,应用实用表达式,将产生较大误差。
变参数鼠笼式异步电动机机械特性,可采用实用修正公式[2]:
(4)
转矩相对值形式的异步机转矩通式为
(5)

γm1为起动时的临界转矩相对值;sm1为起动时的临界转差率。
3.1 机械特性GUI平台
3.1.1 转矩实用表达式
鼠笼式异步电动机按公式(1)绘制的机械特性曲线的GUI界面见图5。

图5 实用表达式绘制鼠笼式电动机机械特性界面
3.1.2 转矩修正表达式
按公式(5)开发的“基于转矩修正表达式的机械特性”界面中,输入电动机特性所需参数,或“加载实例”,可得到可视化的仿真结果。基于转矩实用修正表达式的机械特性见图6。图5和图6中的机械特性曲线存在很大的差异,实际电动机的实验曲线与图6相一致,可见鼠笼式异步电动机的机械特性,若采用实用表达式仿真分析,会造成较大的误差。
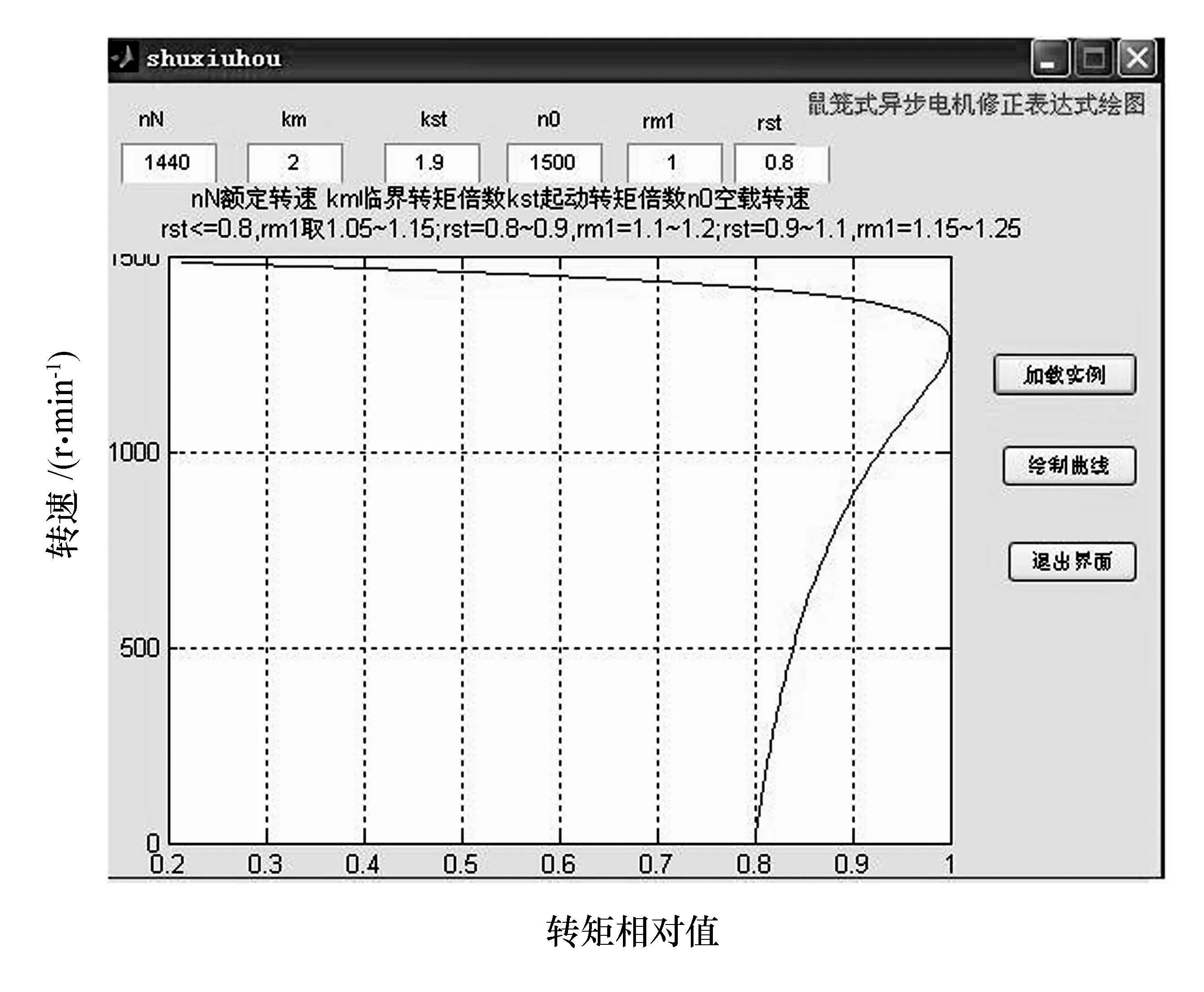
图6 转矩修正表达式绘制鼠笼式电动机机械特性界面
3.2 起动特性GUI平台
3.2.1 基于转矩实用表达式
根据式(1)、(2)和(3),设计绘制的鼠笼式异步电动机起动特性GUI界面见图7。

图7 转矩实用表达式绘制的鼠笼式电动机起动特性界面
图7表明,电动机是根本就不能起动的,而实际电动机是可以起动的,可见鼠笼式异步电动机的起动特性,是不能用实用表达式,即公式(1)来仿真分析的。
3.2.2 基于转矩修正表达式
(6)
根据式(2)、(3)和(6)设计的绘制鼠笼式异步电动机起动特性GUI 界面见图8。图8是修正后的表达式的仿真曲线,可以看出,此鼠笼式异步电动机电动机在0.2 s左右完成了起动,响应很快,误差也很小。
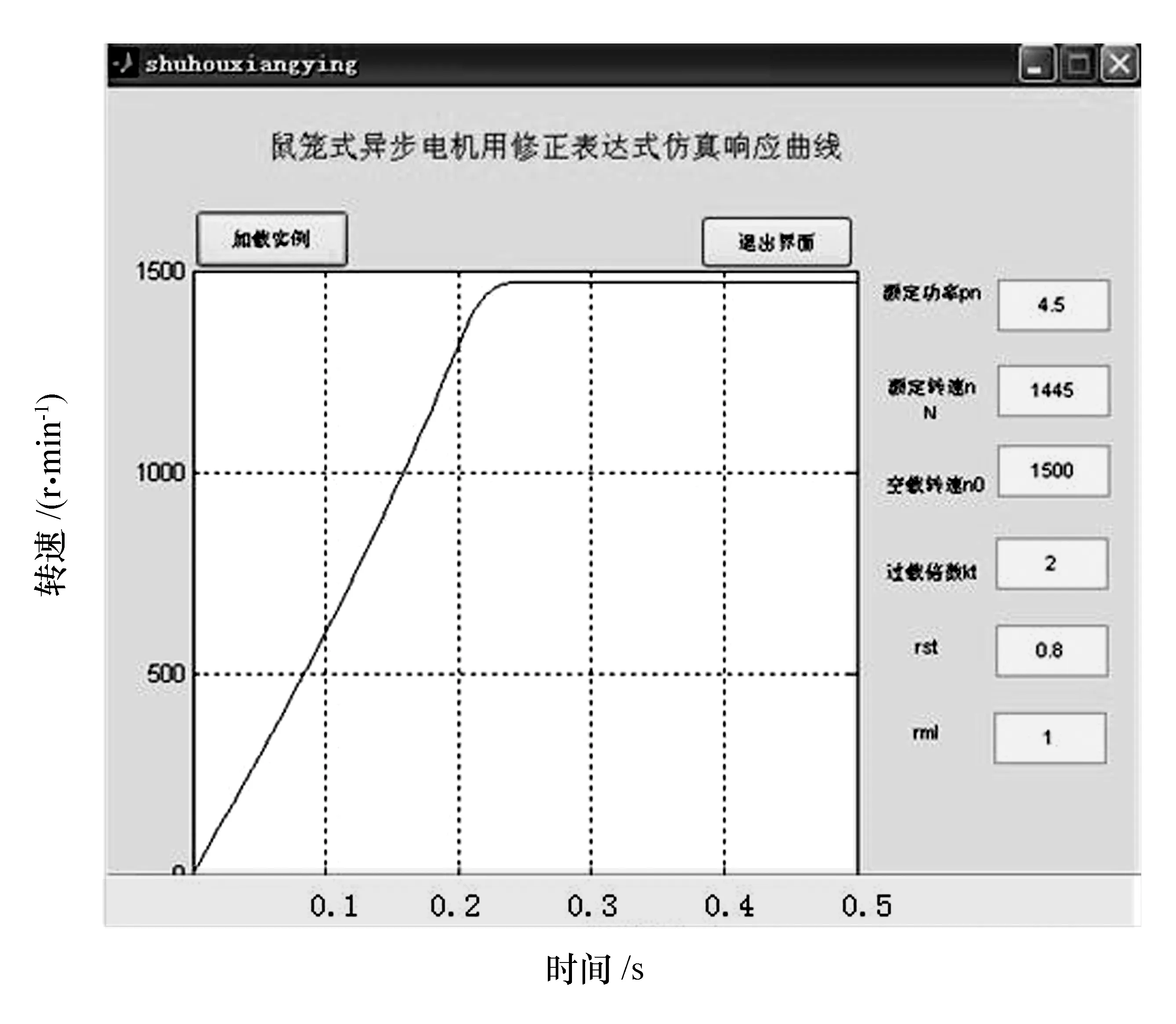
图8 转矩修正表达式绘制的鼠笼式电动机起动特性界面
4 结束语
采用Matlab/GUI开发的异步电动机特性绘制软件,绘制绕线式和鼠笼式异步电动机的机械特性和起动特性曲线,转矩实用表达式可以用于绕线式电动机的特性仿真,不适应于鼠笼式电动机,转矩修正表达式更适合用于电动机的分析与设计;该软件界面简洁,使用方便,有利于电动机的教学和实验,为电动机的分析和设计提供了便捷的方法。
[1] 顾绳谷.电机与拖动基础[M].北京:机械工业出版社,2009.
[2] 谢丽蓉,王智勇,晁勤.鼠笼异步电动机机械特性的研究[J].中国电机工程学报,2008,28(21):68-72.
[3] 谢丽蓉,晁勤,陈华.基于无因次法三相感应电机机械特性的研究 [J].水力发电,2008,34(1):54-57.
[4] 谢丽蓉,王智勇,吴万禄.三相笼型异步电动机启动特性的研究[J].自动化仪表,2011,32(9):12-14.
[5] 罗华飞.Matlab GUI设计学习手记[M],北京:北京航空航天大学出版社,2009.
[6] 宗节保,段柳云,王莹,等,基于MATLAB GUI 软件制作方法的研究与实现[J].电子设计工程,2010,18(7):54-56.
[7] 钟可君,张海林.基于Matlab GUI设计的光学实验仿真[J].实验室研究与探索,2010,29(10):52-53.
[8] 韩庆庆,肖乾虎,袁琦,等.基于GUI功能设计的电机仿真试验系统[J].水电能源科学,2011,29(1):129-131.
[9] 蔡晓津,李晗.基于Matlab的信号分析与处理仿真软件设计[J].温州大学学报:自然科学版,2009,30(2):38-43.
[10] 尚丽,淮文军.基于Matlab/Simulink和GUI的运动控制系统虚拟实验平台设计[J].实验室研究与探索,2010,29(6):66-71.
[11] 秦辉,席裕庚.基于Matlab GUI 的 预 测 控 制仿真平台设计[J].系统仿真学报,2006,18(10):2778-2781.
[12] 史成城,谢丽蓉,张丹.运动控制系统实验平台开发[J].实验技术与管理,2013,30(1):119-121.
猜你喜欢
疯狂英语·新悦读(2023年9期)2023-12-02 17:36:34
设备管理与维修(2022年21期)2022-12-28 07:34:14
防爆电机(2020年6期)2020-12-14 07:17:04
数学物理学报(2020年2期)2020-06-02 11:29:10
安顺学院学报(2020年1期)2020-04-05 10:57:20
制造技术与机床(2019年11期)2019-12-04 05:50:36
现代计算机(2019年6期)2019-04-08 00:46:50
童话世界(2018年17期)2018-07-30 01:52:02
电子制作(2017年20期)2017-04-26 06:57:36
中国卫生(2014年9期)2014-11-12 13:02:00
