基于光纤布拉格光栅的称重传感器系统
2014-03-22 00:42王永皎杜小杰
仪表技术与传感器 2014年8期
王永皎,杜小杰
(河南城建学院,河南平顶山 467036)
0 引言
大型浮式起重机,简称浮吊,是一种应用广泛的工程类船舶,具有流动性作业、可靠性要求高、起重吨位大等特点,可以根据工程需要移动到任何需要的港口或者近海区域,通常用于超重货物转船、海桥工程建设等。但是这类起重机都是金属结构,而且长期的负荷作业以及复杂恶劣的工作环境对其结构的安全监测提出了更高的要求,鉴于这种情况,研究出一种高精度、抗环境干扰能力强的监测系统成为发展趋势。
1 光纤布拉格光栅传感器
1.1光纤布拉格光栅传感器的基本原理
光纤布拉格光栅是一种应用极为广泛的光栅,其传感原理为:当有一段入射宽带光在光纤布拉格光栅中传输时,大部分频段的光会透射过去,只有满足此布拉格光栅中心波长频段的光波才会反射回来。反射光中心波长为[1-2]:
λB=2neffΛ
(1)
式中:λB为光纤布拉格光栅的中心波长;neff为该纤芯的有效折射率;Λ为布拉格光栅的周期。
由图1可以看出:外界任何物理或化学变化引起纤芯折射率或者布拉格光栅周期的变化,都会导致光纤布拉格光栅中心波长的变化,基于这种现象,光纤布拉格光栅传感可以通过观察其中心波长的漂移量来间接获取实验监测的物理量,并且周期Λ可以通过调整两束紫外光的相对角度改变,这样就能制作出工作在不同波段的布拉格光栅,也为多点串联式测量提供了技术支持。
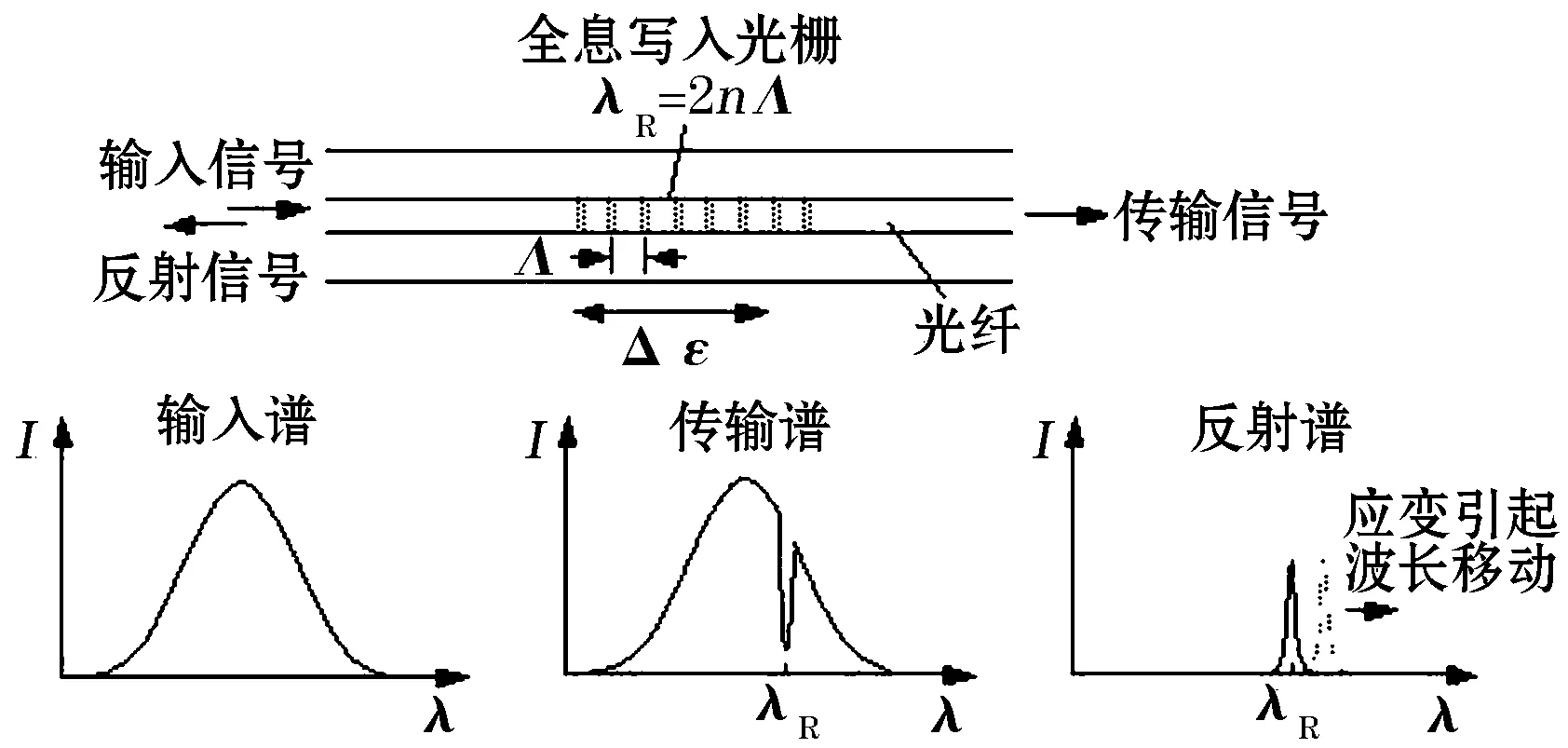
图1 光纤光栅传感原理图
1.2光纤布拉格光栅的传感特性
文中研究的是称重传感器,即待测物理量为应力,根据光纤布拉格光栅传感原理,应力作用会引起光栅有效折射率的变化,而机械形变会使光栅周期常数发生改变;另一方面,外界温度的变化也会引起布拉格光栅有效折射率的变化,热膨胀系数同样会引起光栅周期常数的变化。下面讨论在应力作用与温度作用相对独立状态下的光纤布拉格光栅的传感特性。
1.2.1光纤布拉格光栅的轴向应力特性
当外界有一作用力轴向地作用于布拉格光栅上时,致使光纤光栅被机械性地拉伸或者压缩而引起的光栅周期常数Λ,表示为[3-4]:

(2)
式中εx为待测量点处的轴向应变。
同时由于弹光效应使得光栅有效折射率发生的变化为
(3)
两端同时除neff,即可得:
(4)
式中:Pij(i,j=1,2)为光弹性张量的Pockel系数;v为光栅泊松比。
由此定义Pe为有效弹光系数:
(5)
所以式(5)可以表述为

(6)
上述两种作用的总关系为

(7)
对于石英光纤,Pe取0.22,所以有:
(8)
由式(8),在已知ΔλB的情况下,就可以求出轴向应变εx,在实际工程运用中εx的常用单位常引用为εx,即10-6εx.
1.2.2光纤布拉格光栅的温度特性
当外界温度发生变化时,记为ΔT.
一方面由于热膨胀效应改变了布拉格光栅的周期常数,表示为[3]

(9)
式中α为该材料的热膨胀系数,对于掺锗石英光纤,α一般取5.5×10-7/℃.
另一方面,热光效应会使布拉格光栅的有效折射率发生改变,表示成:
(10)
式中V为光纤的归一化频率。
温度变化引起波长的漂移主要决定于热光效应,占总漂移量的95%左右,表示成:
(11)
式中ξ为热光系数。
由上述两方面可以看出,温度对布拉格光栅的总影响关系可以表示为
(12)
1.2.3光纤光栅的交叉敏感特性
在实际的工程运用中,常有温度和应变同时存在的情况,这一现象交叉敏感特性。
光纤布拉格的光栅的有效折射率neff和周期Λ的改变都将影响其中心反射波长λB,由上两节内容可知,应变对λB的影响主要是由于弹光效应和其周期Λ引起的,而温度对λB的影响是由于热光效应和热膨胀效应所引起的。假定温度和应变对中心波长的影响过程是相对独立的,则当它们两者同时发生变化时,其中心波长的变化可以表达为[4]
(13)
式中ε为其轴向应变。
2 称重传感器模型的建立
2.1称重传感系统的设计原则
称重传感器是通过光栅系数的敏感变化来表征压力的,为了使传感器有良好的精确性、稳定性和抗环境干扰能力,应在设计中尽可能符合以下设计原则[5]:
(1)传感器需要对压力有较好的敏感性,而对温度相对不敏感;
(2)设计结构尽可能简单,减少不必要的力传递过程,最大限度减小由于力传递效率而导致的误差;
(3)封装以及基底材料采用金属材质,避免使用直接胶封或者其他形式的封装,从而提高传感器的长期稳定性;
(4)选择传感器各个部件的材料时,应考虑到材料寿命和抗腐蚀能力,这样可以提高传感器在复杂恶劣环境下的稳定性能;
(5)传感器最好实现串联结构,易波分复用,提高传感器的实用性。
(6)制作工艺要求不要过高,否则不易进行批量生产。
2.2称重传感器模型的建立
针对以上原则以及目前称重传感器的缺点、光纤布拉格光栅传感器的优点,结合光纤布拉格光栅传感器的特性,设计一种等强度悬臂梁式和受压薄膜复合结构的称重传感器。设计其模型重点研究2个方面的问题:对等强度悬臂梁理论进行分析和受压金属弹性体的设计。
2.2.1等强度悬臂梁理论分析
等强度悬臂梁,是一种随着弯矩大小对应改变截面尺寸,以此保持相同强度的悬臂梁,从而保证了梁的各个截面的弯曲应力相同。
标准等强度悬臂梁图2所示,梁的固定端记为O点,自由端记为A点,梁偏移横轴宽度为h,并以横轴对称,其宽度b(x)可以表示成:
b(x)=b0(L-x/L)
(14)
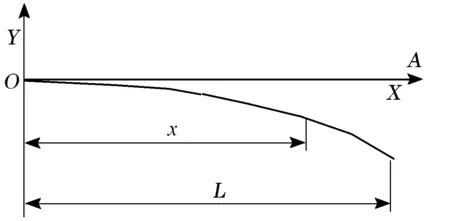
图2 等强度悬臂梁
图2中L为悬臂梁的长度,b0是悬臂梁在O点的横截面宽度,x为梁纵轴上任意一个点的坐标。
由于等强度梁表面的弯曲应力相同,所以在任意点的应变也应该相等,其在O表面处的应力可以表示为
(15)

由式(15)可以看出,等强度梁的应变同时受到几何尺寸和材质材料影响[6]。
2.2.2受压金属弹性的设计
文中选用40Cr钢材作为材料,采用ANSYS有限元分析的方法,通过对受压薄膜的硬件尺寸进行拟定,并对弹性体的剪切应力、径向应力、弹性体中心位移进行3个方面对比,找出在不影响灵敏度的条件下,使得传感器弹性体的性能达到最大的优化的尺寸为:薄膜厚度为10 mm,硬心直径为75 mm.
3 称重传感器的实验分析
3.1预压和冲击实验及结果分析
实验在武汉理工大学光纤中心实验室中进行,利用最大载荷大于40 MPa的力学反力架为实验基本框架、量程为0~35 MPa的压力计、1台光纤光栅解调仪(4路)和1台终端上位机对已制备好的光纤光栅称重传感器进行预压实验,首先验证传感器在反复加载、卸载的情况下的反复性。预压实验现场装配图如图3所示。
W300是 尼 康Coolpix AW130的替代型号,不过两者的配置参数差异并不大。在这次测试中,W300拥有最强的30米防水以及零下10摄氏度防冻能力,防摔高度也是评测中最强的,达到了惊人的2.4米。其他新功能还包括4K视频拍摄能力,尼康SnapBridge通信系统,高度/深度计以及GPS功能。
(a)
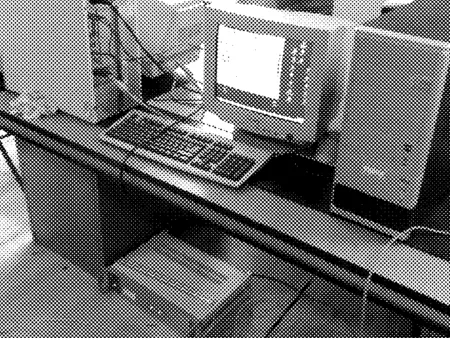
(b)
实验平台搭建好后,利用压力计对传感器进行0~25 MPa的加载和卸载数次,经光纤光栅解调仪将信号传送给PC机,上位机将解调所得的光纤光栅反射中心波长在各个载荷点上进行记录和保存。实验结果如图4、图5所示。

图4 加载和卸载过程波长λ1的变化对比图

图5 加载和卸载过程波长λ2的变化对比图
由图4、图5可以看出,称重传感器在0~25 MPa的载荷进行加载和卸载过程中,悬臂梁两侧的光纤光栅反射波长λ1、λ2保持着几乎重合的状态,反复对称重传感器进行加载和卸载之后,再用相同的方法进行数据处理,得到的数据、图表几乎一致,最多的误差在2 pm左右,在允许范围内。
由于大型浮吊的作业性质会使其臂架承受较大的冲击压力,对称重传感器在冲击载荷下的性能有较高要求。冲击试验是利用预压实验的实验工具,从0 MPa直接加载到30 MPa,而不在固定压力点停留。实验结果表明:与预压实验相比,其初始波长完全一致,当压力在30 MPa时,多次冲击实验的平均漂移量为3 pm左右,在误差允许范围内。
3.2现场测试及结果分析
现场测试将从吊钩空载、吊起货物、上升过程、下降过程几个方面进行分析。图6为现场作业监视过程。
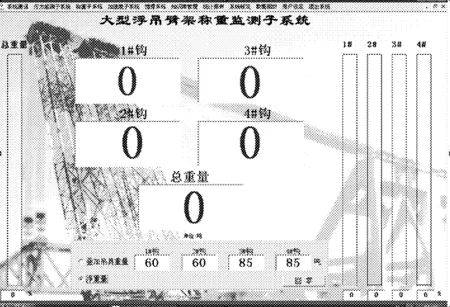
(a)空载
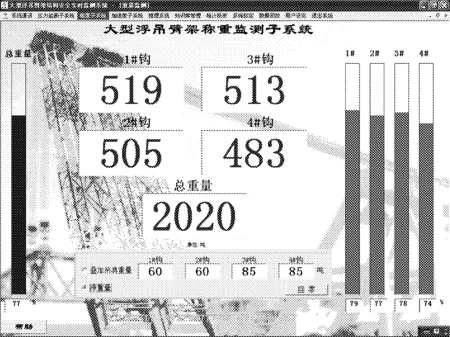
(b)上升
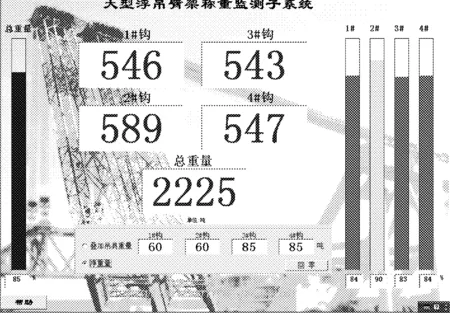
(c)下降
如图6所示,界面中实时显示着4个吊钩的载荷重量以及浮吊所承受的总重量,且会显示所受重量占极限重量的百分比,其中图6(a)是浮吊没有任何负载的情况,上面的0显示的是当前每个吊钩负载的重量,下面显示的是每个吊钩的净重。图(b)表示浮吊负载重物上升过程中每个吊钩的载荷,图6(c)显示浮吊负载重物下降过程中每个吊钩的载荷。实验结果通过吊钩所受重量占极限重量的百分比来向现场工作维修人员进行预警,当数值小于90%时,表示吊钩工作状态正常;当数值大于等于90%且小于100%时,发出初级预警,表明吊钩有轻微的工作异常,接近极限负荷,提醒现场工作维修人员注意;当数值大于等于100%时,发出高级预警,这表明吊钩的工作已经有了严重异常,或已经超过了极限负荷,现场工作人员必须立即停止作业并且采取相关措施,防止安全事故发生。
现场测试在浮吊正常的作业中,4个吊钩的保持在安全的负荷范围内,其中1只吊钩在货物上升时显示数值达到90%,发出初级预警提醒现场工作人员注意检修,在货物下降并卸载后,软件监视可以良好地回零,达到了预期的监测效果。
4 结束语
参考文献:
[1]李川,张以谟.光纤光栅:原理、技术与传感应用.北京:科学出版社,2005:15-23.
[2]廖延彪.光纤光学.北京:清华大学出版社,2000:198-202.
[3]KERSEY A D.Multiplexed interferometer fiber sensors.Proceedings of seventh international conference optical fiber sensors.Sydney,1995:313-319.[4]JACKSON D A,RIBEIRO A B L,REEKIE L,et al.Simple Multiplexing Scheme for Fiber-optic Grating Sensor Network.Opt.Lett,1993,18(14):1192-1194.
[5]刘敏,张强,郝树虹,等.称重传感器的选用原则.硅谷,2009(2):39.
[6]NELLEN P M,MAURON P.Realiability of fiber Bragg greating based sensors for down-hold application.Sensor and Actuators,2003,A103:346-376.
[7]王昱.光纤Bragg光栅称重传感器的研制:[学位论文].昆明:昆明理工大学,2008.
[8]禹大宽,乔学光,贾振安,等.光纤光栅传感系统的现状及发展趋势.传感器技术,2005(3):4-6.
[9]姜德生,何伟.光纤光栅传感器的应用概况.光电子·激光,2002,13(4):420-430.
[10]林钧灿,王文华,王小旭.光纤光栅传感技术应用研究及其进展.大连理工大学学报,2004(11):931-936.
[11]王碧涛.港口机械金属结构应力的在线监测安全评估系统研究:[学位论文].武汉:武汉理工大学,2008.
[12]徐志刚.港口大型机械金属结构应力在线监测与诊断系统研究:[学位论文].武汉:武汉理工大学,2008.
[13]LIU X M,ZHANG X M,CHEN K S.Demonstration of etched cladding fiber Bragg grating-based sensors with hydro gel coating.Sensor Actuators B:Chem,2003,96:468-472.
[14]何进飞.大型浮吊臂架光纤光栅实时监测系统研究:[学位论文].武汉:武汉理工大学,2010.
[15]侯小勤.港口机械金属结构应力在线监测与专家诊断系统的研究:[学位论文].武汉:武汉理工大学,2009.
猜你喜欢
大学物理(2022年7期)2022-07-26
山西冶金(2020年3期)2020-07-15
广西物理(2020年3期)2020-07-09
文苑(2020年12期)2020-04-13
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
华人时刊(2017年13期)2017-11-09
北方交通(2016年12期)2017-01-15
铸造设备与工艺(2015年3期)2015-07-11
中国质量监管(2015年12期)2015-03-24
湖南大学学报·自然科学版(2014年3期)2014-12-30