光纤环绕制过程振动影响分析
2014-03-21 12:23范运强董全林孟凡念张春熹刘丽国贾志军
仪表技术与传感器 2014年5期
范运强,董全林,陈 楠,孟凡念,张春熹,刘丽国,贾志军
(1.北京航空航天大学仪器科学与光电工程学院,北京 100191;2.93796部队,河北石家庄 050000;3.93132部队,黑龙江齐齐哈尔 161016)
0 引言
光纤陀螺作为一种新型角速率传感器,具有体积小、成本低、重量轻等特点[1],代表着陀螺仪的发展方向。光纤环是光纤陀螺的测量元件和传感核心,其绕制质量很大程度上决定了光纤陀螺的实用性能。由于光纤材料特性和光纤环精确缠绕图样的要求,光纤环缠绕过程中光纤张力必须精确控制在一定的范围内[2],张力控制系统是光纤缠绕系统的重要组成部分,可以有效控制光纤张力的大小和张力波动。然而在光纤环绕制过程中,振动等因素对张力系统的影响,增加了光纤张力的波动,对陀螺精度也将造成一定的影响。美国、日本等发达国家光纤陀螺工程化程度较高,实现了全自动四极对光纤环绕制。我国陀螺工程化程度较低,排纤稳定性、振动等影响一直存在,光纤环生产效率远远低于国外发达国家。文中根据光纤张力系统的控制原理,建立了光纤张力系统的力学模型,分析了简谐振对光纤张力的影响,以此为基础进一步分析了振动下绕制的光纤环对光纤陀螺的的影响,并对振动参数造成的影响进行了分析,提出了降低振动影响的方法。
1 光纤张力控制原理及力学模型
光纤绕制张力控制系统的原理如图1所示,当光纤张力发生波动时,平衡杆会偏离平衡位置,转动信息通过张力传感器输入控制系统来调整光纤供纤速度,恢复光纤预定张力,达到控制张力的目的。

图1 光纤缠绕张力控制原理图
光纤初始张力由张力轮和平衡杆结构确定,力学模型如图2所示。
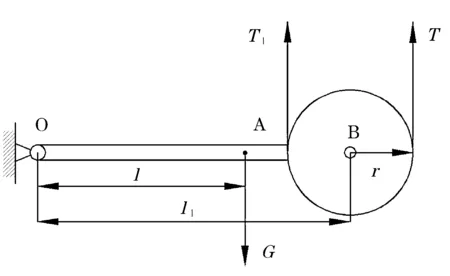
图2 光纤张力系统结构力学模型
为了计算方便,对力学模型进行分析计算前,先对该系统进行简化。
(1)假设张力轮和平衡杆间转动无摩擦;
(2)在缠绕过程中,光纤和张力轮之间无滑动;
(3)平衡杆摆角较小,两侧光纤张力方向保持变化。
当系统处于理想稳定缠绕状态时,光纤张力恒定,力矩平衡方程为:
T1(l1-r)+T(l1+r)=Gl
(1)
由假设式(1)知张力轮两侧光纤的张力T=T1,所以光纤张力初始值为:
(2)
2 简谐振动对光纤张力的影响
2.1张力系统振动方程
由文献[2]知光纤张力轮结构是一个具有粘性阻尼的振动系统,受到外界激振力作用时,力学模型可以等效转化为图3所示,则振动微分方程为:
(3)
式中:J为所有结构对平衡杆转轴的等效转动惯量;c为张力轮结构的等效阻尼系数;K为光纤张力系统的弹性系数;F为外界激振力。

图3 张力系统振动模型
当系统受到的外界激振力是由简谐振动产生时,则激振力为F=F0sin(ωt),张力系统微分方程(3)可写为:
(4)

(5)
式(5)是一个二阶线性常系数非齐次微分方程。所以该方程的通解可表示为:
θ=θ1(t)+θ2(t)
(6)
式中:θ1(t)为对应的二阶线性齐次微分方程的解,代表阻尼系统的自由振动,在小阻尼的情况下,θ1(t)=Ae-ntsin(ωrt+φr),只有在振动初始阶段存在,随着时间增加将衰减下去;θ2(t)为阻尼系统的受迫振动,从微分方程非齐次项可知其特解的形式是与激振频率相同的正弦函数。
设该特解为:
θ2(t)=Bsin(ωt-φ)
(7)
式中:B为受迫振动振幅;φ为位移落后于激振力的相位角。
2.2张力系统动力学微分方程
平衡杆偏离平衡位置θ后如图4所示。

图4 平衡杆振动后位置
此时张力轮的瞬态动力学微分方程可以表示为:
(8)
式中:JO为图4中所有构件对支撑点O的转动惯量;JB为张力轮对其转动中心B的转动惯量;ΔMT、ΔMT1分别为张力轮两侧光纤的拉力变化值ΔT、ΔT1对转动中心O的力矩,
ΔMT=ΔT·(l1cosθ+r)
(9)
ΔMT1=ΔT1·(l1cosθ-r)
(10)
张力轮在转动过程中的动力学微分方程可以表示为有

(11)
由B点加速度得:
(12)
将式(9)~式(12)代入式(8)得光纤输出端张力变化为:
(13)

(14)
2.3光纤张力波动方程
将式(7)代入式(14)得,振动引起的光纤张力的波动值为:
(15)
将式(7)代入式(5)可求得B和φ分别为
(16)
(17)

(18)
(19)
此时光纤张力的波动值可写为
(20)
式中:z为频率比;ζ为阻尼比。
3 光纤环绕制振动对陀螺精度的影响
由文献[5]知,光纤环内应力产生的非互易相位ΔΦs可以表示为:
(21)

由式(21)知,为了降低光纤应力对光纤陀螺的影响,就必须保证光纤环应力分布函数变化幅度较小,使其尽量保持在某一恒定值附近,即要求机械振动引起的张力变化尽量较小。
由于光纤张力的波动值出现在光纤绕制过程中,所以光纤应力变化率dnc/ds与光纤张力波动变化率dΔT/dt满足线性关系:
(22)
式中k1为修正系数。
将式(20)、式(22)代入式(21)得光纤绕制振动对光纤陀螺精度的影响为:

(23)
由式(23)知造成振动影响的因素包括张力系统自身振动特性、张力轮系统机械结构、外界振动特性等。
4 光纤环绕制振动影响分析
根据光纤绕制振动对光纤陀螺精度的影响公式知,影响陀螺精度的振动因素有激振力幅值、频率比、阻尼比。
(1)激振力幅值F0对光纤陀螺精度的影响与激振力幅值大小成正比,为了提高光纤环的质量,降低对陀螺精度的影响,应该控制张力系统激振力的幅值。
(2)频率比z对陀螺精度的影响
令
对于激振力幅值确定的振动,A的变化趋势代表了绕制振动对陀螺精度的影响变化,不同ζ值下,频率比z对光纤陀螺的影响如图5所示。
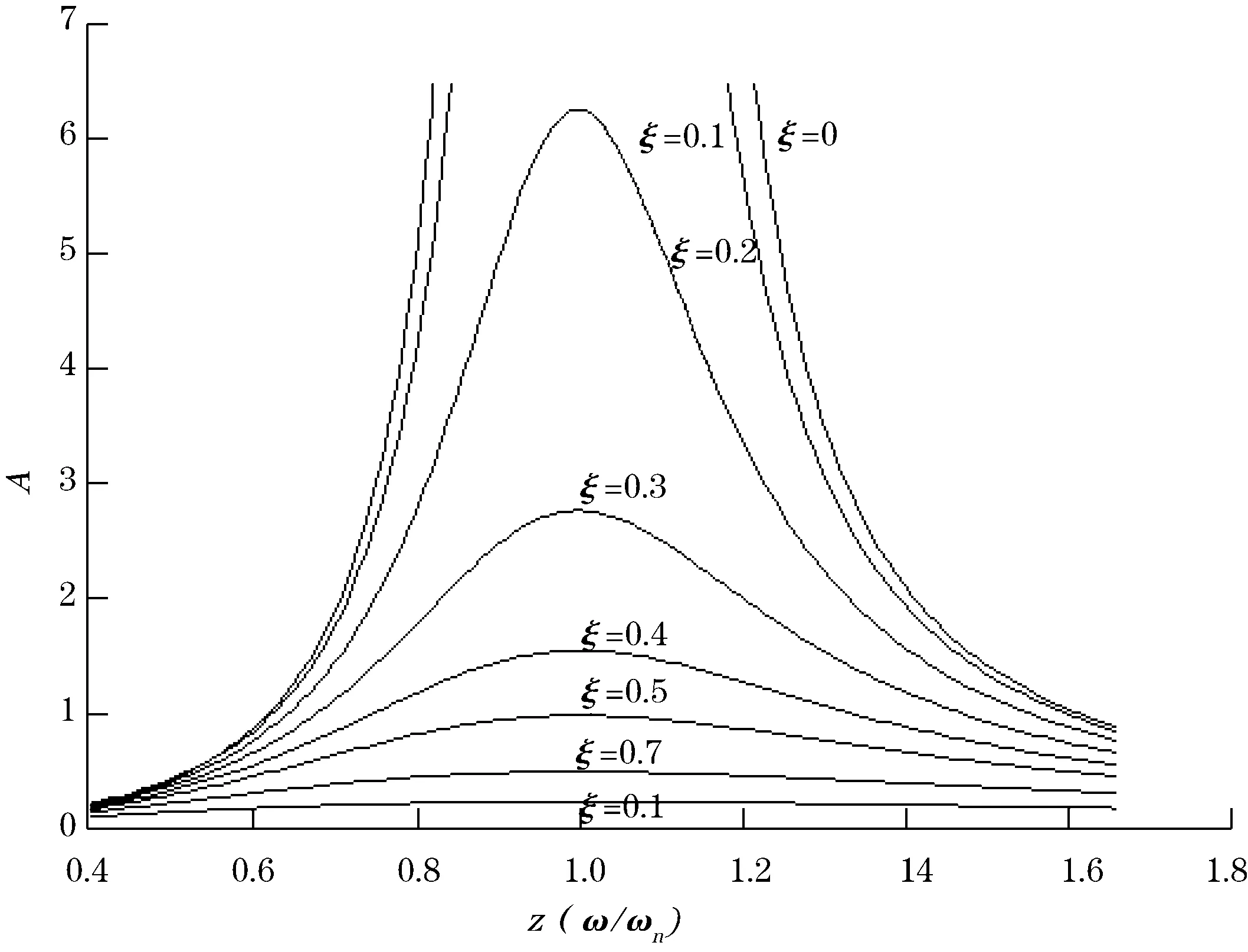
图5 频率响应曲线
由响应曲线可知频率对光纤陀螺精度响应规律,当z≪1时,振动频率对光纤陀螺影响几乎为零;当z≫1时,频率影响也较小;只有当z≈1时,在阻尼系数较小的情况下,振动频率对光纤陀螺精度影响才较为明显,并且阻尼系数越小,影响越显著。而在阻尼系数较大的情况下,频率影响根随频率比近似成正比例线性关系。
(3)阻尼比ζ对光纤张力波动的影响。频率响应曲线图中,所有曲线均在无阻尼(ζ=0)的下方,说明阻尼系数的存在,提高了光纤环的质量。当阻尼比小于0.5时,在频率比z≈1的振动的影响较显著,阻尼比越小则影响就越大,当阻尼比大于0.5时,阻尼比对光纤张力的波动影响较小。
5 结束语
文中建立了光纤张力控制系统的力学模型和振动模型,分析了绕环振动引起的光纤环非互易性对光纤陀螺的影响,同时对振动因素的影响特性进行了仿真计算,结果表明,在光纤绕环过程中,振动幅值与陀螺的影响成正比;阻尼的存在降低了振动的影响,只有阻尼比小于0.5时,振动的影响才较明显;在小阻尼比情况下,频率比在0.7~1.6之间,对陀螺影响较明显,在频率比约为1时影响最显著。所以在绕环过程中,应尽量降低外界激振幅值,适当增加光纤张力系统阻尼比,同时避免张力系统产生共振,这些都可以有效降低振动因此造成的影响;此外合理的优化张力系统结构,降低张力轮自身转动惯量、重量以及平衡杆转动惯量等也能有效控制绕环振动产生的影响,提高光纤环的使用性能。
参考文献:
[1]孟照魁,张春熹,杨远洪,等.光纤环绕制过程中的张力分析.北京航空航天大学学报,2005,31(3):307-310.
[2]孙冬,马保吉.光纤缠绕张力控制系统模型建立.弹箭与制导学报,2006,26(2):777-780.
[3]董全林,刘彬.在伽利略坐标变换下的二端面弹性转轴相似动力学方程.物理学报,2002,51(10):2191-2195.
[4]武民洛,孙冬,马保吉.光纤缠绕中张力和滞后角对缠绕图样的影响及其分析.弹箭与制导学报,2005,25(4):250-252.
[5]赵晋洪,舒晓武,牟旭东,等.光纤绕线机张力控制系统的研究.光学仪器,2005,27(2):37-41.
[6]李正淮.光纤设备中光纤张力与滑轮的关系.光通信研究,1994,(1-2):91-95.
[7]杨瑞峰,贾建芳,温泽强.基于键合图的光纤环绕制小张力控制结构的建模和仿真.测试技术,2012,31(3):119-127.
[8]SHARON A,LIN S.Development of an automated fiber optic winding machine for gyroscope production.Robotics and Computer Integrated Manufacturing,2001,17:223-231.
[9]THOMAS L,DE F,KENDALL L,et al.Development issues For automating quadrupole-patten optical-fiber coil-winding for fiber-optic gyro manufacture.Robotics and Automation,1994,1:202-207
[10]BARHOUR N,SCHMIDT G.Inertial sensor technology trends.IEEE Sensors Journal,2001,4:332-339.
猜你喜欢
数学物理学报(2021年3期)2021-07-19
数学年刊A辑(中文版)(2021年2期)2021-07-17
数学物理学报(2021年2期)2021-06-09
地震研究(2021年1期)2021-04-13
小学生学习指导(低年级)(2019年10期)2019-10-16
北方工业大学学报(2019年5期)2019-03-30
学生天地(2019年6期)2019-03-07
振动与冲击(2019年4期)2019-02-22
军事文摘(2018年24期)2018-12-26
快乐语文(2018年36期)2018-03-12