基于卡尔曼滤波的半挂汽车列车软测量技术
2014-03-21 12:23张向南衣丰艳
仪表技术与传感器 2014年5期
张向南,赵 津,衣丰艳
(1.贵州大学机械工程学院,贵州贵阳 550025;2.山东交通学院汽车工程学院,山东济南 250000)
0 引言
半挂汽车列车以其装载量大、运输成本低、具有“甩挂运输”、“区段运输”、“滚装运输”等优点,受到汽车运输业的高度重视和普遍发展。由于牵引车和半挂车之间的相互耦合作用,高速时极易发生侧翻、摆振和折叠等危险工况。为了解决上述问题,研究人员相继开发了制动防抱死系统、车道偏驶警示系统等汽车电子控制系统,来实现一些基本的汽车辅助驾驶功能。另一方面车辆的智能化是车辆技术的重要发展方向,大量的车辆智能控制系统的应用可以提高车辆的行驶性能,但这也对关键状态参数的测量提出了更高的要求[1]。
国外学者Ray,Laura R利用扩展卡尔曼滤波的方法进行汽车状态及轮胎与路面之间摩擦系数估计[2]。国内学者轧浩利用线性非时变卡尔曼滤波方法对汽车横摆角速度进行了估计[3]。赵津等利用Kalman-Bucy滤波方法建立了横向运动状态观测器,考虑到了车速对车辆运动状态的影响,实现了线性时变系统的状态估计,对车辆横向运动速度与横摆角速度的实际值进行估计[4]。高振海等在基于车辆动力学和卡尔曼滤波的汽车状态软测量中针对汽车动力学控制过程难以在线测得的横摆角速度等状态参数,建立了汽车横摆角速度的线性最小均方误差估计算法[5]。然而,在文献中对于半挂汽车的状态估计的研究还较少。文中基于软测量技术和卡尔曼滤波理论,并结合半挂汽车列车三自由度动力学模型,用Matlab/Simulink软件建立了基于卡尔曼滤波的汽车行驶姿态的软测量模型,并对模型进行了行驶车辆质心侧偏角、横摆角速度仿真分析和预估。
1 半挂汽车列车动力学模型
半挂汽车列车是由半挂车和牵引车组成。它是一个复杂的多自由度空间运动系统,若考虑所有的自由度,就必须列出相应数量的运动微分方程,使分析和求解变得极为困难,因此必须抓住一些主要的参数及自由度。建立整车的运动方程时,车辆模型应不太复杂又能较为真实地模拟车辆系统。三自由度模型是包括整车的横向运动、牵引车的横摆运动以及半挂车的横摆运动在内的平面运动的线性系统力学模型,如图1所示。
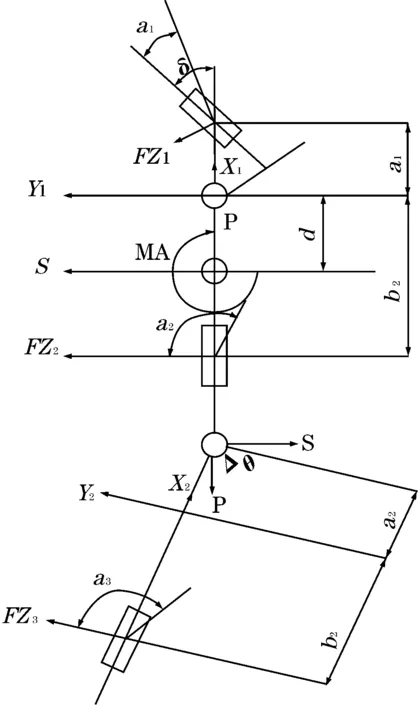
图1 三自由度系统数学模型
研究时假设:将牵引车和半挂车视为两个刚体;轮胎侧偏特性处于线性范围;牵引车和半挂车质心的速度相等,车辆坐标系X1Y1Z1,X2Y2Z2分别建立在牵引车和半挂车质心处,惯性坐标系XYZ初始时刻与牵引车质心重合[6]。
该三自由度模型可用以下状态空间方程来表示[7]:

(1)
a11=(m1+m2)V,a12=-m2d,a13=-m2a2,
a14=m2V;a21=m1dV,a22=IZ1,a23=0,
a24=CA;a31=m1a2V,a32=0,a33=IZ2,
a34=-CA;a41=0;a42=0,a43=0,
b21=(a1+d)k1-(b1-d)k2,
b23=0,b24=0,;b31=a2(k1+k2)-b2k3,
b42=-1,b43=1,b44=0;c1=k,
c2=(a1+d)k1,c3=a2k1,c4=0
式(1)为状态空间的状态方程,状态空间的输出方程为:
Yt+1=EX+Fδ
(2)
式中:
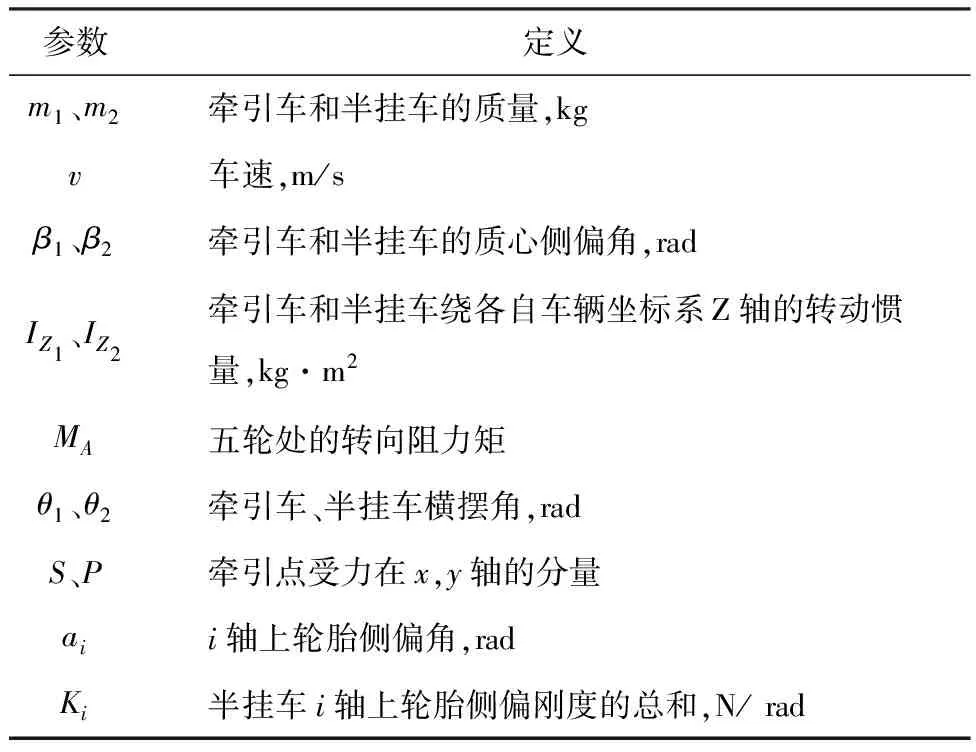
表1 车辆模型参数
2 软测量方法设计
2.1软测量技术
软测量技术也称为软仪表技术,是指以计算机软件代替硬件传感器,对一些难测量或暂时不能测量的重要变量(主导变量)采用间接测量的方法,选择另外一些容易测量的变量(辅助变量),通过建立以辅助变量为输入,主导变量为输出的数学模型来推断和估计主导变量[8]。
实际上,卡尔曼滤波所处理的对象是随机信号,利用系统噪声和观测噪声的统计特性,以系统的观测量作为滤波器的输入,以所要估计值作为滤波器的输出,滤波器的输入与输出之间是由时间更新和观测更新算法联系在一起的,根据系统方程利观测方程估计出所有需要处理的信号。
文中提出了基于卡尔曼滤波的半挂汽车列车的软测量方法。即把横摆角速度和质心侧偏角的软测量问题转化为一个状态估计问题,利用牵引车、半挂车横摆角速度和质心侧偏角三自由度汽车动力学模型,把主导变量(横摆角速度等)作为汽车动力学系统的待估计的过程状态变量,并利用卡尔曼滤波方法从辅助变量获得主导变量横摆角速度的估计值。
2.2构造卡尔曼滤波器
前面建立了三自由度的动力学模型,其状态空间方程见式(1)和式(2)。实际车辆在行驶过程中,不断受到不平路面和大风等外界因素的干扰,本章假定在车辆前后轮上附加侧向风干扰,方向始终垂直于车身平面。考虑状态噪声和量测噪声的影响,则:

yv=Cx+Du+Hw+v
式中:u=δ;w、v为系统状态方程和量测方程的噪声。
H=[-1/mt-1/mt-1/mt-1/mt]
线性连续卡尔曼滤波器:
式中L为滤波器的增益矩阵,由求解代数的Riccati方程确定。
3 仿真分析
上面建立了三自由度汽车动力学模型的状态方程和量测方程。在数字计算机中利用卡尔曼滤波进行状态估计时,需要把状态方程转化为差分方程,即进行连续系统离散化。量测噪声方差矩阵为R,系统过程噪声方差矩阵为Q.车速为60 km/h,量测噪声的协方差阵R=1,系统过程噪声方差矩阵Q=100。前轮角阶跃3度输入,估计量测输出侧向加速度,状态估计输出横摆角速度和质心侧偏角。该估计器实现了对量测信号的滤波和对汽车列车横摆角速度、质心侧偏角的估计,同时将滤波和预估的仿真结果与测量结果进行对比。
用Matlab软件编程,并在Simulink中仿真得到以下仿真曲线。图2为牵引车质心侧偏角的测量值和估计值以及二者的误差仿真曲线。图3为牵引车横摆角速度的测量值和估计值以及二者的误差仿真曲线。图4为半挂车横摆角速度的测量值和估计值以及二者误差仿真曲线。由图2、图3和图4可以看出,文中所设计的卡尔曼滤波器的估计值与测量值比较吻合,有比较高的精度。然而质心侧偏角和横摆角速度的估计存在一定的误差,这主要由于卡尔曼滤波器模型的精度引起的,这是因为文中建立三自由度半挂汽车列车模型是简化的车辆模型。

(a)牵引车质心侧偏角测量值与估计值
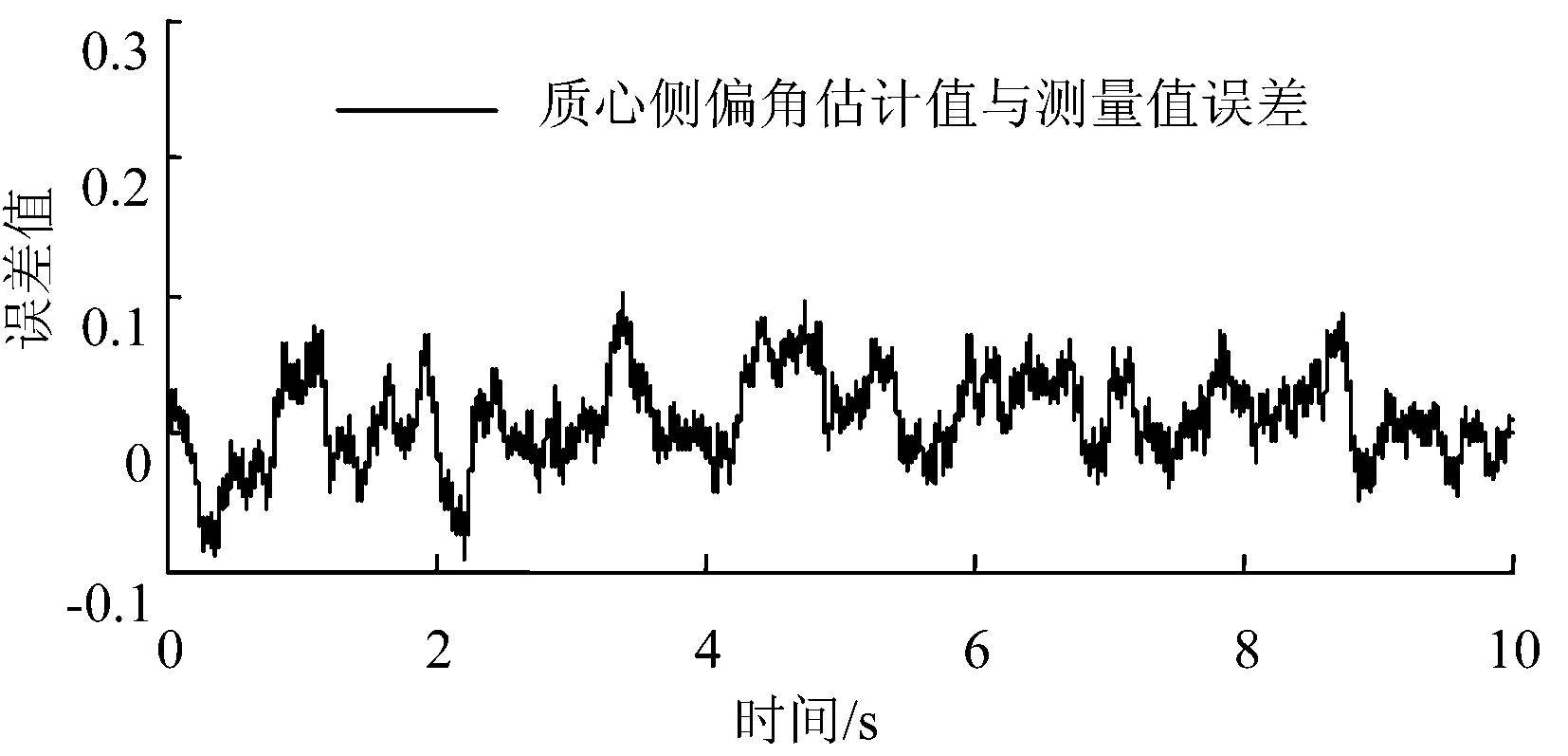
(b)牵引车质心侧偏角测量值与估计值误差

(a)牵引车横摆角速度测量值与估计值

(b)牵引车横摆角速度测量值与估计值误差

(a)半挂车横摆角速度测量值与估计值

(b)半挂车横摆角速度测量值与估计值误差
4 结束语
在目前车载传感器比较昂贵的情况下,汽车控制系统的参数软测量技术是一种很好的补充,另外它也是车辆故障诊断技术的一个技术基础。文中根据建立的半挂汽车列车三自由度车辆模型,设计了基于卡尔曼滤波方法的半挂汽车列车状态估计器。利用了较易测得的方向盘转角信号等可方便的得到不易测量的横摆角速度等汽车参数。仿真结果表明,设计的卡尔曼滤波器的估计值和测量值比较吻合,有比较高的精度,所以可以在半挂汽车列车的研究中,用软测量估计来估计半挂车中难以测量的参数,进而对汽车性能进行检测。
参考文献:
[1]ZHAO J,ZHAO R C,ZHAO HE F.HE。Vehicle lateral states estimation using Kalman- Bucy filter.Proceeding of FISITA 2012,World Automotive Congress,Lecture Notes in Electrical Engineering 198,Springer-Verlag Berlin Heidelberg 2013.
[2]RAY,LAURA R.Nonlinear State and Tire Force Estimation for Advanced Vehicle Control.Control Systems Technology,1995,(3):117-124.
[3]轧浩.汽车前轮转向、后轮转向及四轮转向的控制分析:[学位论文].长春:吉林工业大学,1998.
[4]ZHAO J,KAMEL A E.Integrated Longitudinal and Lateral Control System Design for Autonomous Vehicles.In ICONS 2009,The 2nd IFAC International Conference on Intelligent Control Systems and Signal Processing,Istanbul,Turkey,September,2009,(2):496-501.
[5]高振海.基于车辆动力学和Kalman滤波的汽车状态软测量.系统仿真学报,2004,16(1):22-24.
[6]王德杉,谢进荣.半挂汽车列车转向特性的线性五自由度模拟计算及实验研究.江苏工学院学报,1989,10(1):10-19.
[7]王沫然.Simulink4 建模及动态仿真.北京:电子工业出版社,2002:36.
[8]李海青,黄志尧.软测量技术原理及其应用.北京:化学工业出版社,2000.
猜你喜欢
民用飞机设计与研究(2020年4期)2021-01-21
装备制造技术(2020年3期)2020-12-25
中学生数理化·高一版(2019年12期)2019-12-31
新课程·中学(2019年7期)2019-09-17
中国钢铁业(2018年6期)2018-07-26
物理教学探讨(2018年1期)2018-02-13
中国设备工程(2017年23期)2017-01-20
汽车实用技术(2015年8期)2015-12-26
汽车文摘(2014年10期)2014-12-13
中国钢铁业(2014年4期)2014-08-22