基于PSCAD的CIGRE HVDC模型控制系统研究
2014-03-20 01:52:38宋吉江
山东理工大学学报(自然科学版) 2014年5期
尉 龙, 宋吉江, 孙 磊
(1.山东理工大学 电气与电子工程学院, 山东 淄博 255091;2.国网山东荏平县供电公司, 山东 聊城 252100)
广义的讲,直流输电系统的控制包括正常运行控制、故障控制、继电保护系统、各种开关操作的控制以及监控系统、通信系统等等[1].对一个高压直流输电系统而言,控制系统主要包括整流侧控制和逆变侧控制.在研究直流输电运行情况时,仿真出HVDC的控制系统并加以运行是关键.本文利用PSCAD中CIGRE HVDC模型控制系统仿真实例,来具体说明高压直流输电系统的正常控制特性,并着重分析整流侧和逆变侧控制特性之间如何相互配合.
1 CIGRE HVDC模型简介
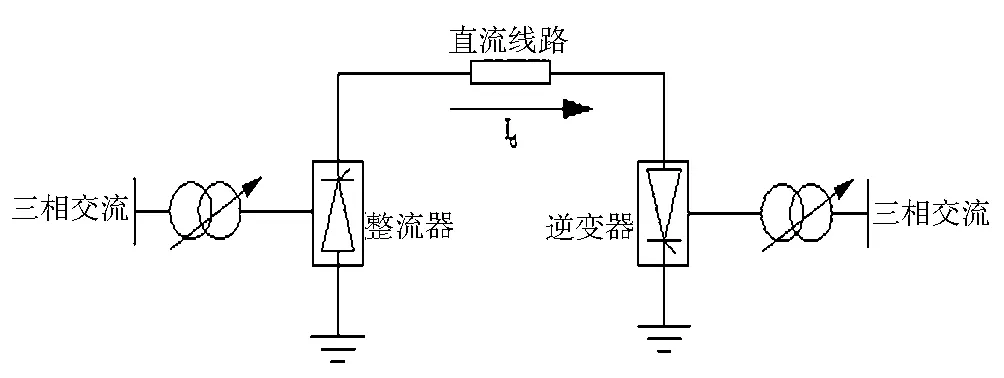
CIGRE直流联络线研究委员会HVDC系统控制工作组14.02于1991年提出了第一个用于HVDC控制研究的标准模型。其主要目的是便于用各种计算机程序和仿真器在相似的主电路模型基础上,进行不同的直流控制设备和控制策略性能的比较研究.用这个标准模型作为研究的基础,可以反映HVDC控制研究中的主要问题[2],其结构如图1所示.
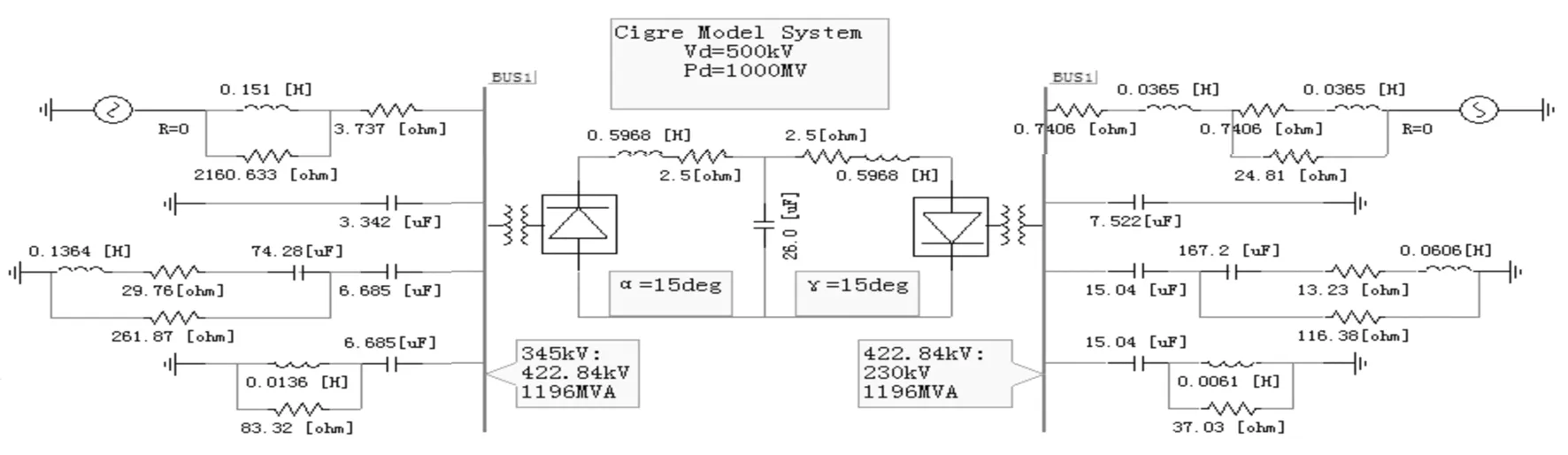
图1 直流输电标准测试系统模型
采用单极500 kV、1 000 MW 直流输电,整流侧和逆变侧都采用12 脉波的换流器,联于弱交流系统[3](频率为50 Hz 时短路比为2.5).这个系统被广泛用于测试直流系统.
在电力系统的暂态仿真软件中,也采用此模型作为高压直流输电的仿真案例.其整流侧和逆变侧的结构图分别如图2、图3所示,包括换流变和12脉动换流器.
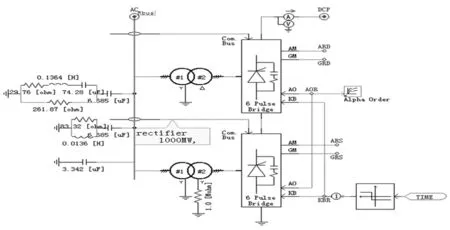
图2 PSCAD中整流侧结构模型
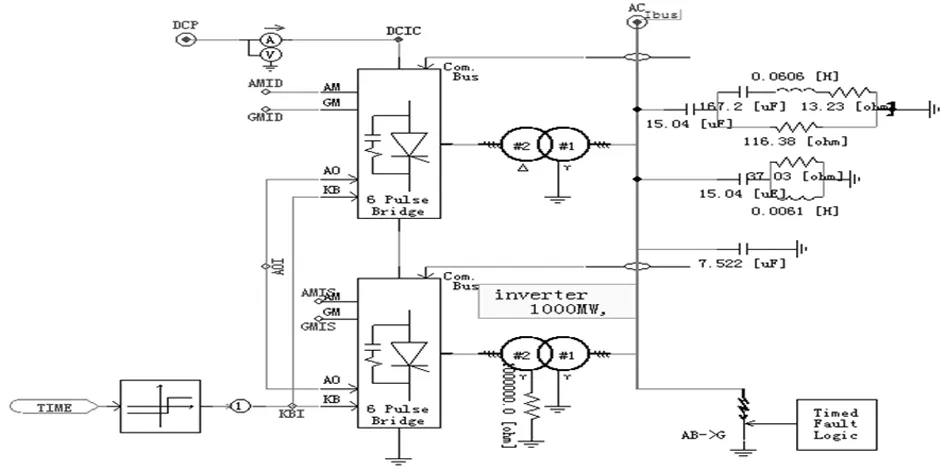
图3 PSCAD中逆变侧结构模型
2 HVDC控制系统的控制特性
2.1 基本控制方程与控制要求
特高压直流输电系统的接线图及其等值电路如图4所示.它表示一个单极联络线或双极联络线中的一个极[4].
(a)
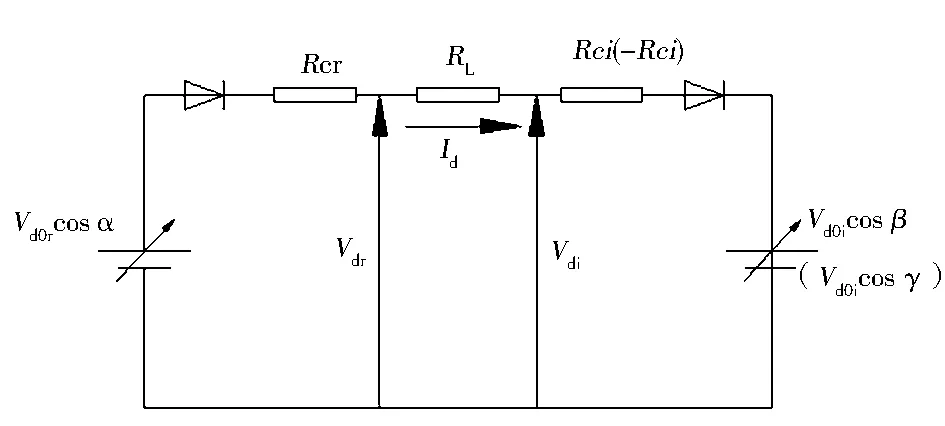
(b)图4 直流输电系统的接线图及等效电路图
图4中:α为整流器触发角;β(γ)为逆变器的触发超前角(熄弧角);Vdor、Vdoi分别为整流侧和逆变侧的无相控理想空载直流电压;Rcr、Rci分别为整流测和逆变侧的等值换相电阻,RL为直流线路电阻.
故从整流侧流向逆变侧的直流电流Id为
(1)
整流器终端的功率为
Pdr=VdrId
(2)
逆变器终端的功率为
(3)
高压直流输电系统通过控制整流器和逆变器的内电势(Vdor)和(Vdoicosβ)来控制线路上任一点的直流电压以及线路电流(或功率).
可见,直流系统的调节通过两种手段来实现[5]:
通过调节整流器的触发角α或逆变器的触发超前角β快速而大范围地控制直流线路的电流、电压和功率.所需时间为1~10ms.
还可利用换流变压器分接头的带负荷切换调节换流器的交流电动势,进行慢速控制。所需时间为5~6s.
两种调节手段以互补形式应用,其中前者具有快速控制的功能,是直流系统区别于交流系统的最大优点.具体地,高压直流输电控制方式有:定电流控制、定电压控制、定延迟角控制、定超前角控制、定熄弧角控制和定功率控制.
2.2 控制特性
2.2.1 理想控制特性
高压直流输电系统承担输送功率的任务,通常要求按照某种功率指令运行.直接控制模式就是整流侧控制电流恒定,逆变侧控制电压恒定.
因此,理想下整流器运行特性是一条垂线,逆变器运行特性是一水平线.整流器保持定电流(CC),逆变器运行于定熄弧角(CEA),保证足够换相裕度.特性如图5所示.
2.2.2 整流侧与逆变侧联合控制特性
触发前加在每一个晶闸管上的正电压总是供电给该阀触发脉冲电能的电源电路,所以触发不可能在5o之前发生.整流器靠改变α来保持电流,一旦达到α最小值,整流侧电压就不可能升高,而进入α=αmin的定触发角CIA上[6].如图6中整流器运行曲线.
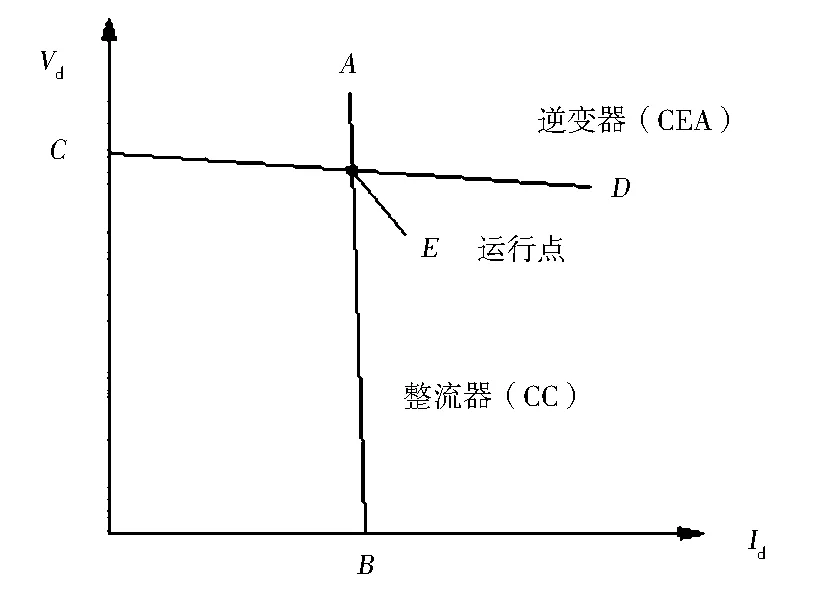
图5 理想控制特性
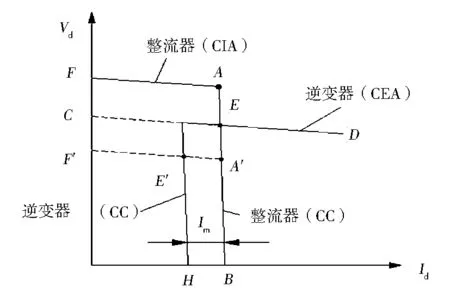
图6 联合控制特性
正常电压下,CEA与CC特性曲线交于E点.当整流侧交流电压降低或逆变侧交流电压升高时,整流器α角会一直减小进入最小触发角控制.为防止CEA特性与整流器特性没有相交点而导致整流侧电压为0,在逆变侧装设电流调节器,其整定值比整流器低一些.所以逆变器特性由CEA控制和定电流CC控制组成.整流器与逆变器控制特性的组合,就是电流裕度控制特性.整流器和逆变器电流整定值差值Im为电流裕度.
2.2.3 低压限流环节与最小触发角限制
直流输电中的控制方式不是单独控制方式的应用,而是几种方式的组合.为了维持输电系统对于稳定性要求,除了上述控制方式外,需添加触发角限制环节与低压限流环节.
低压限流控制(VDCOL)特性是指在某些故障情况下,当发现直流电压低于某一值时,自动降低直流电流调节器的整定值,待直流电压恢复后,又自动恢复整定值的控制功能.逆变侧交流系统发生短路故障而导致电压下降时,由于下述原因,要保持额定直流电流或功率是不可能的:当一个换流器的电压下降30%左右时,另一端换流器的无功功率需求将增加,会对交流系统产生不利影响;此外,电压降低时,换相失败和电压不稳定的风险也大为增加[7].所以为了限制持续过电流(短路电流),在整流侧和逆变侧设置低压限流环节,在故障时限制短路电流。VDCOL特性曲线可能是交流换相电压或直流电压的函数.图7、图8给出两种类型的VDCOL.
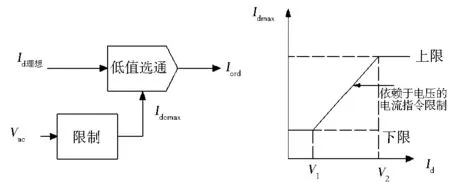
图7 作为交流电压函数的电流限制图
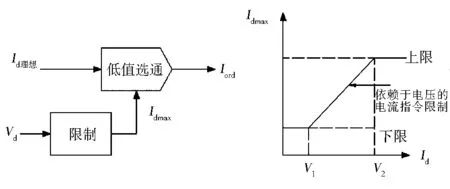
图8 作为直流电压函数的电流限制
在换相失败或直流线路故障时,逆变器可能切换为整流方式,这将逆转功率输送方向.为预防这种情况,在逆变器控制中引入最小α限制,这将逆变器的触发角限定在大于90°的某个值,典型范围为95°到110°.如图9逆变器V-I特性曲线最下面部分.
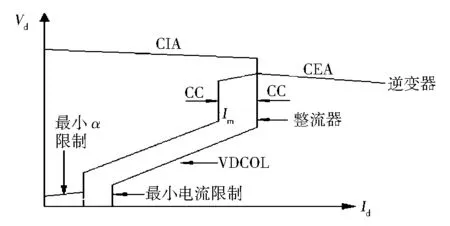
图9 有最小触发角限制的静态伏安特性
3 控制特性在CIGRE HVDC模型中仿真应用
3.1 整流侧控制系统
整流侧作用是控制换流器触发角,保持电流值不变.模型的整流器控制系统结构如图10所示.
系统有两个输入端CMR和逆变器的电流指令,输出为α.整流侧电流CMR是整流直接输出测量值,未经过大电感平波,需要经过一阶线性滤波环节G/1+sT除去脉动,得到直流电流值.与逆变侧测量电流值作差,求出电流偏差ε.Δε与输出的Δβ值成正比例,检测到有电流差值时,Δε增大导致β增大,从而使得触发角α减小(α+β=180°).PI环节
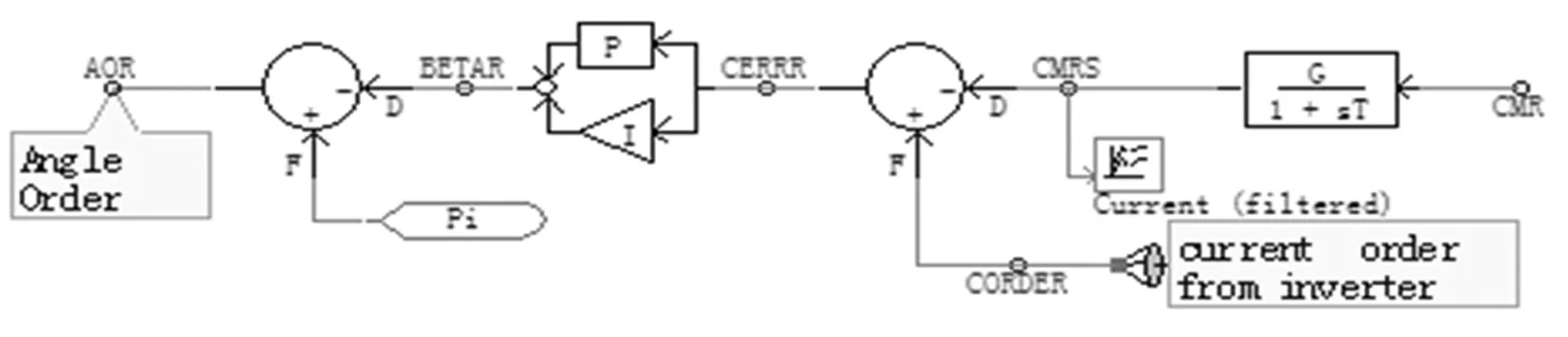
图10 整流侧控制系统
中的积分环节可以消除静态误差,微分控制环节能改善动态特性,除此之外,在PI环节中还设置β的最大输出为3.054,即175°来限制触发角α最小为5°.输出的触发角值输入到12脉动换流器,实现定电流控制.所以CIGRE HVDC模型整流侧实现的定电流控制和最小α控制.
3.2 逆变侧控制系统
逆变侧的控制系统设计需要考虑换相失败,比整流侧复杂.在PSCAD中用一个封装模块来表示.如图11所示.
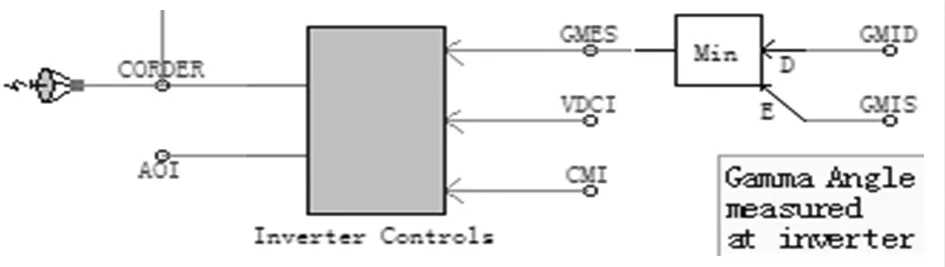
图11 逆变器控制结构
GMID与GMIS分别为逆变侧上下两桥的γ角测量值,为了防止熄弧角γ过小导致换相失败,必须选择把最小的γ输入到控制模块中,同时输入的还有在逆变侧测量的电压VDCI和电流CMI.输出的是逆变侧的电流指令和逆变侧触发角,在模型中逆
变侧电流指令CORDER通过无线传输到整流侧,触发角AOI输入到逆变侧12脉动换流桥.
3.2.1 低压限流环节
模块的封装内部结构如图12所示.输入的逆变侧电压电流都需经过一阶线性滤波环节,需要注意的是电压值在滤波后需要经过补偿.因为在应用低压限流环节时,模型中输入的电压应该是线路中点的电压,而逆变侧电压低于中点电压,需要进行电压补偿.如果不采用补偿电压,会使的逆变侧过早进入低压限流环节,导致电流不稳定.在最小值选取环节,有手动设置电流值输入,可以视为定电流控制.之所以设置低压限流和定电流控制,为了防止直流输电线中出现过大电流,避免换流阀受到过热损害[8].在最小电流值选取出来之后作为整流侧定电流指令CORDER被发送到整流器端.其实,上述部分是PSCAD中HVDC模型整流侧定电流控制的一部分.
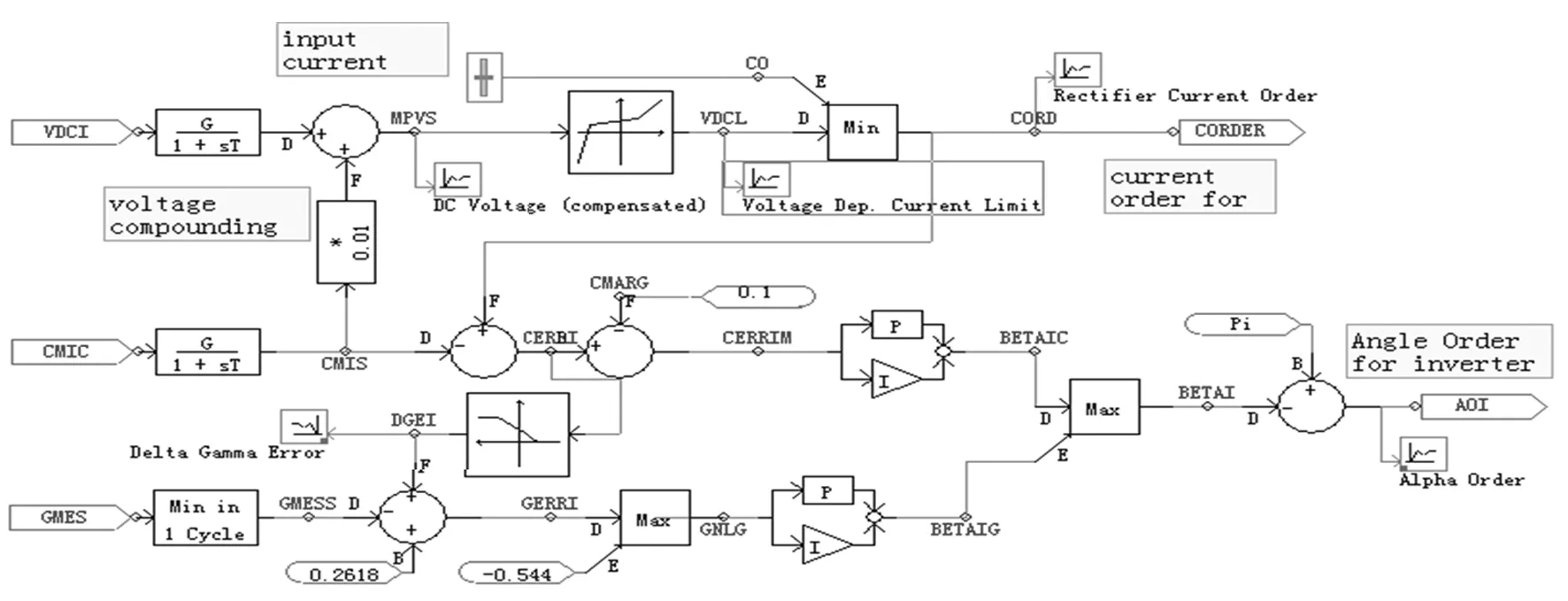
图12 逆变侧控制系统
CMIC,即为逆变侧实际测量电流,作为逆变侧自身定电流控制的输入值,与整流侧定电流指令CORDER作差,其差值输入到PI环节来产生触发角.在产生差值时,整流侧定电流值需要减去电流裕度(即为额定电流的10%).
设Ie为直流系统定电流,Ico为整流侧电流指定值,Icm为逆变侧实际测量值,输入PI环节的差值为ε,则
ε=Ico-10%Ie-Icm
(4)
因为所有的电流电压测量量均经过一阶线性环节得出标幺值,而以Ie作为基准值时,Ie=1,ε=Ico-Icm-0.1.故在得出Δε=Ico-Icm差值后添加减去0.1的环节.PI输出环节在上节做解释,不在赘述.
3.2.2 定γ控制
除了定电流控制之外,还有定γ控制。GMES代表测量的γ值.γ的输入要取一个周期的最小值,只要当检测到的最小值满足大于某一定值时,才能保证不会换相失败.同理,在定γ控制结构中第一个加减环节,输入恒定值为0.261 8,换算成角度约为15°,也是为了保证γ的最小值大于15°防止换相失败.当γ角过大时,会使触发超前角β过大增加无功功率,所以需要设置限γ幅值环节.输入恒定值为-0.544.约为31°.加上前面γ最小角15°,所以γ上限约为46°.
在定电流和定γ角控制之间存在辅助控制环节,称为γ加速控制.当整流侧电流指定值与逆变侧差值过大时,斜坡传递函数会一直输出饱和数值,加在定γ角控制的加减环节上,促使γ迅速上升.由公式(1)可得
(1)
得出Id迅速上升.
无论在整流侧还是逆变侧,都是靠调节β角来实现控制,所以定电流和定γ角控制最后都输出β值.为了使的熄弧角足够大而不至换相失败,采用最大输出环输出较大的β值,从而得到逆变侧的触发角[9].
4 HVDC仿真控制特性
为了验证模型控制系统的维持直流系统稳定运行的能力,在逆变侧与换流变连接的交流母线端设置AB两相接地故障.在0.1s时发生故障,持续时间0.05s.总仿真时间为2s.逆变侧交流电压与直流电流的波形分别如图13和图14所示.其中,图中所有的电气量均取标幺值量,AC Volts(RMS)代表逆变侧交流电压有效值. AC Volts为逆变侧交流系统电压,DC Volts为逆变侧直流电压,DC Current为逆变侧直流电流.

图13 逆变侧交流系统电压波形

图14 逆变侧直流电流波形图
在1s时,逆变侧发生的两相接地故障使得交流电压有效值下降,从而导致逆变侧直流电压Vdoi数值的下降。由公式1可知,由于Vdorcosα不变化,使得直流电流迅速上升.为了保护换流阀和防止换相失败,低压限流环节(VDCOL)开始动作,电流开始呈现下降趋势.
4.1 故障过程
对于整流侧定电流控制而言,电流指定值Ico受到VDCOL环节限制而降低,以小于1(p·u)电流值作为整定值.同时,为了继续减小直流电流到低于1(p·u)的整定值,α应开始增大,如图15所示,验证定电流控制正确性.
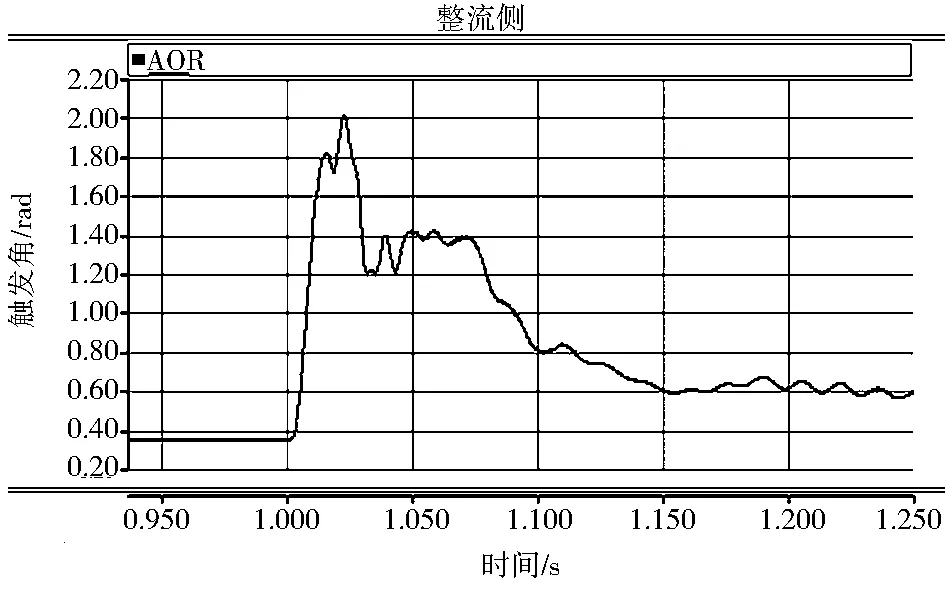
图15 故障时整流侧α角度变化
逆变侧短路故障导致电流上升,从而换相重叠角很大,γ角瞬时应该趋于0,如图16所示.
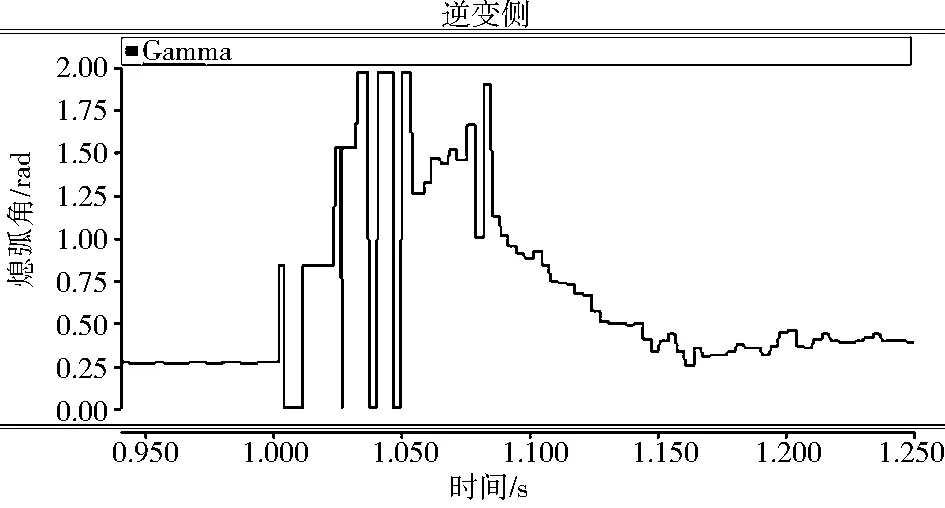
图16 γ角取值变化
逆变侧此时进行定γ(γ=0)控制.这意味在定γ控制结构中第一个加减环节一直输入恒定值15°,通过PI环节引起逆变侧β角增大,如图17所示.
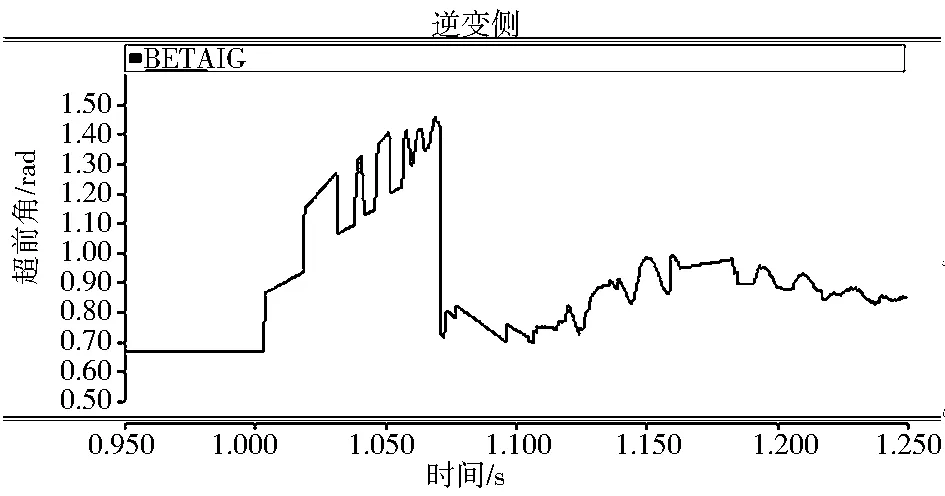
图17 β角取值变化
β增大,从公式(1)分析Vdoicosβ会下降,不利于直流电流增大,但是β增大利于之后熄弧角γ增大预防换相失败的发生,所以才采取此措施.故障期间,整流侧采用定电流控制,逆变侧采用定γ控制来恢复电流指定值,但此时电流指定值是经过VDCOL限流环节之后的电流值.
4.2 故障切除
在经过0.05s故障之后,Vdoi值上升到正常值,VDCOL则开始输出正常的额定直流电流值.整流侧开始减少α值调整电流值,逆变侧也开始进入定电流控制,系统恢复稳定运行状态.
5 结束语
采用了PSCAD中CIGRE HVDC模型,设置故障来分析仿真过程中不同控制特性协调应用,得出控制结论。在逆变器交流侧发生两相短路故障过程中,整流侧的定电流控制和逆变侧的定γ角控制同时控制HVDC系统,由于低压限流环节,恢复的电流值低于正常运行的直流电流值.在故障切除之后,根据新的电流整定值,整流侧和逆变侧进行定电流控制.
[1] 张勇军,陈碧云.高压直流输电原理与应用[M].北京:清华大学出版社,2012.
[2] 张欢,刘天琪,李兴源.新型多端直流输电技术研究[J].四川电力技术,2007, 30(6): 1-5.
[3] 邓广静,周威.CIGRE 直流输电标准模型的建模及控制策略仿真研究[J].江苏电机工程,2009,28(6):31-33.
[4] 郝婧.基于EMTDC仿真平台的特高压直流输电控制系统建模的研究[D].华北电力大学,2012.
[5] 陶瑜,马为民,马玉龙.特高压直流输电系统的控制特性[J].保定:电网技术,2006,30(22):1-4.
[6] 熊凌飞.HVDC换流阀触发控制模型的研究[D].华北电力大学,2011.
[7] 马为民.800kV特高压直流系统换流器控制[J].高电压技术,2006,32 (9):71-74.
[8] 赵畹君.高压直流输电工程技术[M].北京:中国电力出版社,2004.
[9] Szechtman M,Wess T,Thio C V. A benchmark model for HVDC system studies[C]//AC and DC Power Transmission. London:IET,1991:374-378.
猜你喜欢
日用电器(2022年4期)2022-05-26 03:51:28
现代仪器与医疗(2021年6期)2022-01-18 03:22:48
科学家(2021年24期)2021-04-25 17:55:12
能源工程(2020年6期)2021-01-26 00:55:22
大众科学·上旬(2020年2期)2020-03-30 03:51:17
上海公路(2017年1期)2017-07-21 13:38:33
农业科技与装备(2016年5期)2016-08-15 10:20:48
通信电源技术(2016年4期)2016-04-04 02:57:16
中国科技信息(2015年18期)2015-11-10 03:55:34
电源技术(2015年1期)2015-08-22 11:16:26