
基于DDMR辅助的GNSS-R载波相位差测高方法
2014-03-19 08:24王艺燃洪学宝张彦仲
北京航空航天大学学报 2014年2期
王艺燃 洪学宝 张 波 张彦仲
(北京航空航天大学 电子信息工程学院,北京 100191)
基于全球卫星定位系统(GNSS,Global Navigation Satellite System)的GNSS-R(GNSS-Reflection)微波遥感技术利用GNSS的无线电信标源作为散射雷达照明源进行微波遥感,通过接收机装置连续采集GNSS卫星直射信号及经探测目标散射的回波信号并进行相关的数据处理[1].GNSS-R技术因其全天候、全天时、宽覆盖、丰富且免费的信号资源以及高时空分辨率等应用优势而成为遥感和导航技术领域近年来的研究热点,国内外研究机构先后开展了利用GNSS反射信号实现海面高度测量、海态监测[2-4]、海面风场反演[5-7]、海冰反演[8]、土壤湿度测量[9]、海面浮油探测[10]等方面的研究工作,具备广阔的发展和应用前景.对海面、湖面等反射面进行测高是GNSS-R遥感的主要应用领域,主要分为码相位和载波相位测高两种方式.码相位测高是通过对直射信号与反射信号的时延-多普勒映射接收机(DDMR,Delay-Doppler Map Receiver)相关结果的码相位差进行观测而实现,码相位测高的精度会受到导航扩频码测距能力的限制,通常将采用该方法的GNSSR 系统应用于机载和星载测量中[11-13].基于直射-反射信号载波相位差的测高方式可实现更高的测量精度,但该方法对于应用环境的要求较严格,一般只应用于波浪较小的江面、湖面等平静水域的岸基测高,且反射信号的跟踪处理需采用特殊的信号处理方法,如文献[14]中所提出的半闭环处理方法等.由于反射信号的信噪比较差且信号功率波动大,采用传统的载波相位测高方法对实测数据进行处理时容易出现搜索不到相关功率峰值或错误定位峰值的情况,从而引起失锁或出现测量误差.
本文提出了一种基于DDMR辅助载波相位差提取的GNSS-R岸基测高方法,该方法采用闭环跟踪方式对直射信号进行跟踪,将完成跟踪后的载波与反射信号相乘,并将扩频码进行对应的延时,用于完成对反射信号的扩频码同步,延时的时间通过对直射与反射信号DDMR的观测获得,反射信号的跟踪采用全开环的处理方式.岸基实验证明该方法可实现对反射信号的稳定跟踪并准确提取载波相位差.
1 GNSS-R的测高原理
GNSS-R海面测高的原理如下:相对于到达接收机天线的GNSS直射信号,经过镜面反射点的反射信号存在一个时间延迟τ,τ中含有海面高度的信息,可以据此进行海面高度的反演.在岸基GNSS-R测量中可近似认为地球表面为水平的,即忽略地球曲面的影响.根据光学几何原理建立的GNSS-R测高几何关系如图1所示.
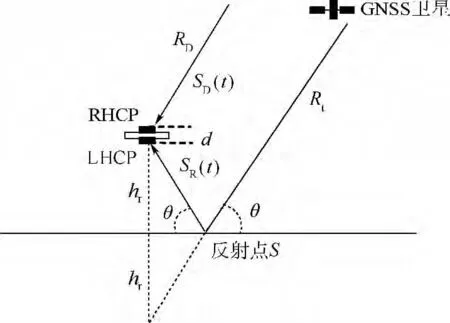
图1 GNSS-R海面测高原理
不考虑大气层的损耗等空间传播不理想因素,GNSS反射信号与直射信号的传播路径差可表示为

式中,hr为接收机反射天线到反射面的高度;θ为镜面反射点处的卫星高度角;d为接收机RHCP天线与LHCP天线之间的距离.当精确测量出ΔρE后,即可获得反射点到接收机的高度为

设hR为接收机相对大地参考框架的高度,则海面高度实际值为

2 载波相位差提取方法
2.1 直射与反射信号载波相位差的提取
对于利用载波相位测高的岸基GNSS-R接收机,其直射、反射信号的路径延时可以表示[15]为

目前最为有效的GNSS-R载波相位测高方法是文献[14]中所提出的半闭环处理方法,该方法采用传统的闭环跟踪方式对直射信号进行跟踪,将完成跟踪后的载波引入反射信号处理通道与反射信号相乘,并对同步后的扩频码进行延时,调整延时量的大小使其与反射信号的相关功率最大,延时的步长为100 ns(对应C/A码0.1码片),搜索范围不大于2个码片,完成对反射信号的扩频码同步,并利用四象限反正切鉴相器(four quadrant arctangent discriminator)对同步后的直射反射信号进行处理,得到载波相位差小数部分的单次估计值[14].该方法的优点是结构简单、易于实现,可直接得到载波相位差小数部分的结果,即有效消除整周模糊,但在反射信号的开环码跟踪搜索过程中容易因搜索不到相关功率峰值或错误定位峰值而引起失锁或出现测量误差.
2.2 基于DDMR辅助的载波相位差提取
本文提出了一种基于DDMR辅助的载波相位差半开环提取法,该方法将DDMR码相位测高的信号处理过程中所求得的码相位差ΔτD-R作为直射通道与反射通道的码相位延时量,即对直射通道中同步后的扩频码进行ΔτD-R的延时后与反射信号相关,用于反射通道的码跟踪.该方法省去了码相位延时搜索的过程,且可以准确地对反射信号中的扩频码进行同步.
2.2.1 DDMR 的处理方法
首先通过DDMR实现对直射与反射信号之间码相位延时的精确估计,DDMR提取码相位延时的处理过程如图2所示,对反射信号的积分过程中使用了文献[16]中的反射信号导航数据位翻转快速检测与修正技术.

图2 DDMR处理过程
DDMR提取ΔτD-R的具体处理流程如下:
1)对直射、反射信号进行1ms的相干积分预处理,对直射信号预处理后的DDMR输出结果进行差分相干(将前后2个预处理周期的DDMR结果进行差分相乘)处理,提取其峰值实部后进行极性判决,生成导航数据位修正因子序列pk;
2)依据pk对相同处理周期内的反射信号DDMR结果进行修正,并对修正后的直射、反射信号DDMR结果做进一步的相干积分;
3)直射信号DDMR输出结果分为2路,一路作为捕获结果参与直射信号同步与解扩解调,实现对接收机的定位(第4)步);另一路同反射信号DDMR一起继续进行非相干累加(第5)步);
4)对捕获后的直接信号进行跟踪和定位解算,该部分的软件接收机结构与常规的GNS接收机相同;
5)对相干积分后的直射与反射信号DDMR结果进行非相干累加处理,进一步提高信噪比并消除斑点噪声的影响,得到信号的相关波形,完成对直射与反射信号的相关处理;
6)对反射信号的DDMR相关波形进行相关函数微分(DCF,Derivative of the Correlation Function)处理[17],得到反射信号的DCF峰值码相位,与直射信号相关峰值所对应的码相位求差值即可得到反射和直接信号的精确码延时估计ΔτD-R.
2.2.2 载波相位差的提取
将ΔτD-R作为直射通道与反射通道的码相位延时量,即:将直射通道中同步后的扩频码进行ΔτD-R的延时后与反射信号相关,用于反射通道的码跟踪.基于DDMR辅助的载波相位差提取方法如图3所示.基于DDMR辅助的载波相位差提取方法流程如下:
1)对直射信号进行同步,当本地码和本地载波实现了对直射信号的跟踪后,输出直射信号的同相和正交分量相关值,记为ID和IR;
2)将完成跟踪后的载波与反射信号相乘,并对同步后的扩频码进行延时,延时时间即为DDMR输出的码相位延时参考量ΔτD-R,完成对反射信号的扩频码同步;同步后直射信号的同相、正交分量相关值在送入环路鉴别器之前均进行20ms的积分处理以消除导航数据位的影响;
3)利用ID分别对反射信号的同相和正交支路进行基带数据位剥离,得到

其中sgn为符号函数,即

4)使用四象限反正切鉴相器计算得到载波相位差小数部分的单次估计值:

5)对ΔφR-D进行滤波并去除粗差后利用式(4)对路径延时进行计算.
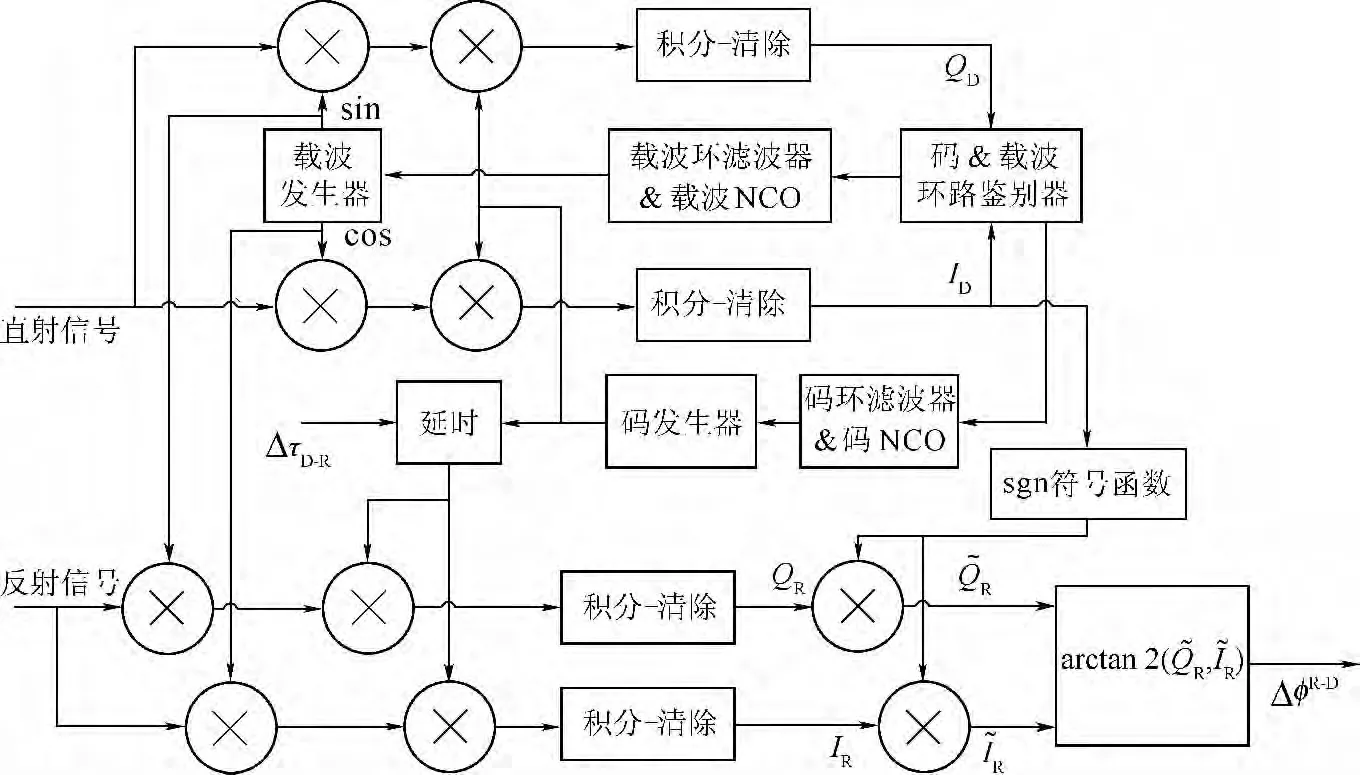
图3 基于DDMR辅助的载波相位差提取方法原理图
3 岸基试验验证
2013-02-17—2013-02-20,笔者所在课题组在辽宁省丹东市鸭绿江水域开展了岸基GNSS-R的测高试验,接收机架设于鸭绿江断桥桥面(东经124°39'23.911 7″,北纬 40°6'57.133 4″),天线朝向西南,方向角约为220°,为了更有效地对反射信号进行接收,天线有大约5°的仰角.试验位置及接收机架设方式如图4所示.

图4 丹东鸭绿江断桥试验天线架设位置图
接收机的硬件部分主要包括用来接收GPS直接信号的普通低增益(3 dB)GPS右旋极化天线、接收水面反射信号的中等增益(12 dB)GPS左旋极化阵列天线以及射频前端和采样器等.直射和反射信号分别经天线接收后由射频前端完成下变频,射频前端采用OlinkStar的NS210M多通道信号采样器,其中频采样频率为16.367 667MHz,2 bit量化后产生原始采样数据经USB接口转至电脑中由接收机的软件部分进行处理.接收机的软件部分主要由包括常规的GPS软件接收机定位功能,原始采集数据预处理功能以及高度反演模块等功能模块组成.
使用软件接收机处理2013-02-19T17:00—18:30所采集的数据.试验以江中的水文水位标尺判读数据作为高度反演结果的参考依据,试验开始时江面至接收机的高度约为16.51m,结束时约为16.37m.选择2013-02-19T17:10开始的数据,此时的卫星空视图如图5所示.
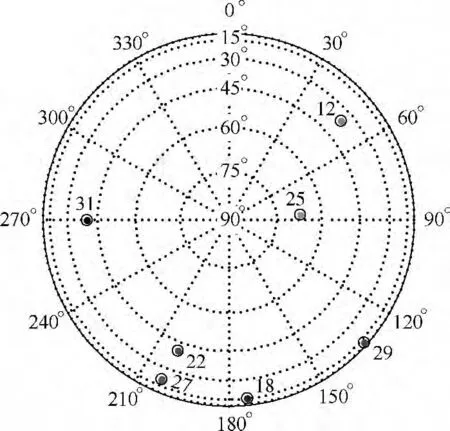
图5 GPS卫星空视图
试验中,PRN 22与PRN 27卫星近似位于天线架设正前方向,PRN 27的卫星高度角低于20°,不适宜用于高度反演试验,PRN 22的高度角为40.8°,故选取PRN 22卫星信号作为处理对象.DDMR分别对直射与反射信号进行21ms的相干积分及80次非相干累加,获得直射信号与反射信号的码相位延时估计值,用于对反射信号进行开环跟踪.连续处理10 s的数据,提取载波相位差并计算水面至接收机的高度,结果见图6.去除粗差并进行0.5 s的数据平均后的测高结果见图7.图中所示的标准差均为去除粗差后的测算结果.
可见,使用该方法进行反演,未进行潮位修正的反演结果围绕实际高度上下浮动约10 cm,标准差约为2.5 cm,测量精度达到cm级.在对长度为0.5 s的数据进行平均后标准差约为0.6 cm.图7中,第1.5 s~第3 s的高度落差大于2 cm,这是由于试验中架设天线使用的是有弹性的木质天线架,会出现随风轻微抖动现象.试验结果可见,采用该方法的GNSS-R接收机可以稳定地对反射信号进行跟踪并提取直射与反射信号的载波相位差.

图6 岸基试验水面至接收机高度反演结果

图7 岸基试验水面至接收机高度反演结果(0.5 s平均)
4 结论
本文提出了一种基于DDMR辅助的载波相位差提取方法,给出了系统结构及信号处理方法,并利用该方法进行了基于载波相位差反演水面高度的岸基试验.试验证明采用该方法的GNSS-R接收机可以稳定地对反射信号进行跟踪并提取直射与反射信号的载波相位差,实现cm级的测高精度,经过0.5 s的数据平均后精度可达mm级.
References)
[1] Martin-Neira M.A passive reflectometry and interferometry system(PARIS):application to ocean altimetry[J].ESA Journal,1993,17:331 -355
[2] Valencia E,Camps A,Park H,et al.Impact of the observation geometry on the GNSS-R direct descriptors used for sea state monitoring[C]//International Geoscience and Remote Sensing Symposium(IGARSS).Piscataway,NJ:IEEE,2012:2825 -2828
[3] Soulat F,Caparrini M,Germain O,et al.Sea state monitoring using coastal GNSS-R[J].Geophys Res Lett,2004,31(21):L21303
[4] Marchan-Hernandez JF.Sea state determination using GNSS-R techniques:contributions to the PAU instrument[D].Barcelona:Univ Politecnica de Catalunya,2009
[5] Zavorotny V U,Voronovich A G.Scattering of GPS signals from the ocean with wind remote sensing application[J].IEEE Trans Geosci Remote Sens,2000,38(2):951 -964
[6]路勇,杨东凯,熊华刚,等.基于 GNSS-R的海面风场检测系统研究[J].武汉大学学报,2009,34(4):470 -473 Lu Yong,Yang Dongkai,Xiong Huagang,et al.Study of ocean wind-field monitoring system based on GNSS-R[J].Geomatics and Information Science of Wuhan University,2009,34(4):470-473(in Chinese)
[7] Garrison JL,Komjathy A,Zavorotny V U,et al.Wind speed measurement using forward scattered GPS signals[J].IEEE Trans Geosci Remote Sens,2002,40(1):50 -602
[8] Fabra F,Cardellach E,Rius A,et al.Phase altimetry with dual polarization GNSS-R over sea ice[J].IEEE Transactions on Geoscience and Remote Sensing,2012,50(6):2112 -2121
[9] Zavorotny V U,Voronovich A G.Bistatic GPS signal reflections at various polarizations from rough land surface with moisture content[C]//International Geoscience and Remote Sensing Symposium(IGARSS).Piscataway,NJ:IEEE,2000:2852 -2854
[10] Valencia E,Camps A,Rodriguez-Alvarez N,et al.Using GNSSR imaging of the ocean surface for oil slick detection[J].IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing,2013,6(1):217 -223
[11] Germain O,Ruffini G,Soulat F,et al.The eddy experiment:GNSS-R speculometry for directional sea-roughness retrieval from low altitude aircraft[J].Geophysical Research Letters,2004,31(21):L21307
[12] Marchan-Hernandez JF,Rodriguez-Alvarez N,Camps A,et al.Correction of the sea state impact in the L-band brightness temperature by means of delay-Doppler maps of global navigation satellite signals reflected over the sea surface[J].IEEE Transactions on Geoscience and Remote Sensing,2008,46(10):2914-2923
[13] Rodriguez-Alvarez N,Akos D M,Zavorotny V U,et al.Airborne GNSS-R wind retrievals using delay & Dopplermaps[J].IEEE Transactions on Geoscience and Remote Sensing,2013,51(1):626-641
[14] Helm A,Beyerle G,Potsdam M NG,etal.Detection of coherent reflections with GPS bipath interferometry[EB/OL].New York:Cornell University Library,2004[2013-04-01].http://arxiv.org/abs/physics/0407091
[15] Ruffini G,Caparrini M,Ruffini L.PARIS altimetry with L1 frequency data from the bridge 2 campaign experiment[R].CCN3-WP3 Technical Report,ESA/ESTEC Contract No.14285/85/nl/pb,2002
[16] Wang Yiran,Zhang Bo,Shao Dingrong.Differential coherent algorithm based on fast navigation-bit correction for airborne GNSS-R software receivers[J].Tsinghua Science and Technology,2013,18(1):88 -99
[17] Hajj G A,Zuffada C.Theoretical description of a bistatic system for ocean altimetry using the GPS signal[J].Radio Science,2003,38(5):1089
猜你喜欢
导航定位学报(2022年1期)2022-02-17
电子制作(2019年14期)2019-08-20
电子制作(2019年24期)2019-02-23
现代电子技术(2019年1期)2019-01-10
电子制作(2018年19期)2018-11-14
大陆桥视野·下(2017年5期)2017-06-19
环球时报(2017-05-16)2017-05-16
电子制作(2017年19期)2017-02-02
电子制作(2016年1期)2016-11-07
对联(2015年22期)2015-06-11
