基于DSP的单相高频整流电路的设计
2014-03-17 10:32马学军陈旭武
湖北理工学院学报 2014年2期
李 滦,刘 俊,马学军,陈旭武
(湖北理工学院电气与电子信息工程学院,湖北黄石435003)
随着电力电子技术的飞速发展,大多数电力电子变流装置如变频器、逆变电源、高频开关电源等都是通过整流环节来获得稳定的直流电压。传统的整流技术一般采用二极管不控整流或晶闸管相控整流,这会产生大量的电流谐波和无功功率,从而造成严重的电网污染[1]。为了解决电力电子变流装置的谐波污染和无功损耗问题,可通过谐波补偿和 PFC电路或者使用新型的电力电子装置如高频PWM整流器,使其不产生谐波且功率因数为1。随着数字控制技术的发展和高速稳定的数字信号处理器 (DSP)的出现,更多的控制策略需要通过DSP得以实现,而在电力电子装置的设计中使用数字控制已经成为发展趋势。基于TMS320F28335设计的一款高频PWM整流装置,根据经典乘法器控制原理,采用PI调节器实现电压、电流双闭环控制获得稳定的直流电压,是一种实时性强、稳定性高、性能优异的电力电子装置。
1 系统结构框图和工作原理
系统结构框图如图1所示,系统以TMS320F28335为控制核心,通过 PWM驱动电路、全桥电路、保护电路、差分检测电路和辅助电源电路等实现单相AC-DC变换,具有输入、输出过电压和过电流保护功能,可通过触控屏设置各个参数并实时显示,具有很好的人机交互界面。
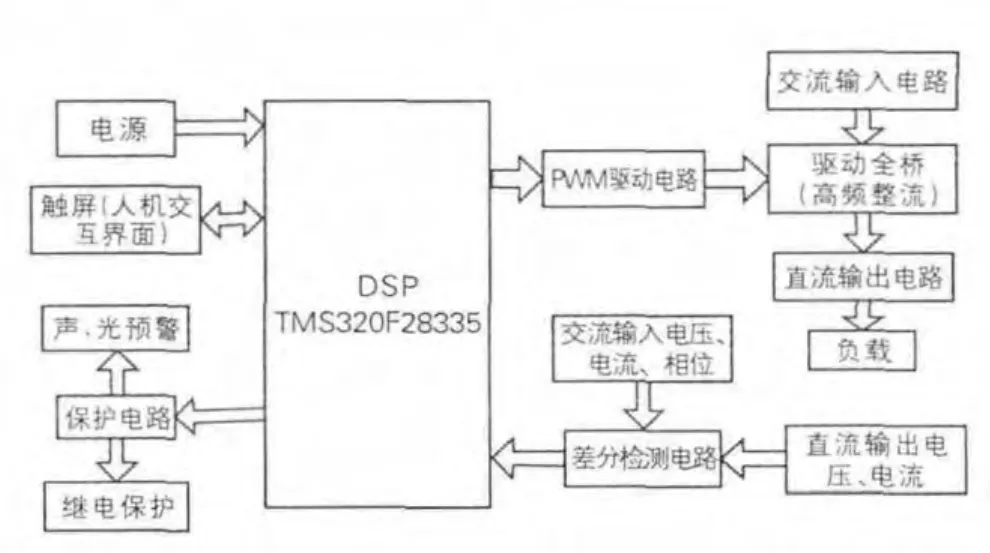
图1 系统结构框图
高频PWM整流器主要有2个技术指标:一是要求具有很稳定的输出直流母线电压;二是要求交流输入电流谐波含量较小,并使输入的电压和电流相位保持一致,获得单位输入功率因数[2]。2个技术指标的实现都取决于对输入电流的大小和相位的控制,所以高频PWM整流器的控制关键在于对输入电流的控制。直接电流控制方法具有降低控制性能对功率电路参数的依赖性和提高系统的动态响应性能的优点,因此该系统采用直接电流控制方法来实现。
1)电压电流双环控制。该控制方法采用电压外环和电流内环双闭环控制。电压外环通过对整流后的直流母线电压进行 PI控制,使其直流输出电压时刻稳定在给定值,锁相环PLL采集输入电压的相位和频率作为输入电流控制器给定值的相位和频率,电压外环的PI控制器的输出作为输入电流控制器给定值的幅值,从而获得输入电流控制器给定值。通过电流控制器,使得输入交流电流的实际值能够快速、准确地跟踪给定值。结合理论计算和实际测试修改电流控制器的参数,电流控制器的输出既包含了对输出电压的控制又包含了对输入电流的控制,再通过SPWM调制即可得到期望的控制值。
2)输入功率因素控制。高频PWM整流器的一个重要参数指标就是获得交流侧的单位功率因数,即要求输入的电压和电流之间的相位和频率保持一致,因此快速而准确地确定交流输入电压的相位是决定高频PWM整流器性能指标的关键因素。锁相的方法使用较多的是周期调节法和实时调节法,传统的周期调节法是通过捕获电网电压过零点的同步信号,该方法操作方便简单,但无法排除电网谐波产生的干扰,当电网电压有干扰时会产生不止一个过零点的同步信号,这样就可能导致捕获的信号存在错误。而实时调节法使锁相环可以实时快速地进行调节,动态响应快,并能解决周期调节法的不足,但实时调节存在算法复杂,程序编写较繁琐等缺点[3]。高频PWM整流器在实际应用的现场环境中收到干扰信号会导致电压谐波增加,且输入电压可能会受到电网电压波动的影响,使频率变化较大。为了解决上述问题,采用一种基于离散傅里叶变换(DFT)算法的基波周期调节锁相环法来综合上述2种调节法的优点。
当一个周期内采样N个点时,对于离散时域周期信号X(n),由DFT得到基波系数为:
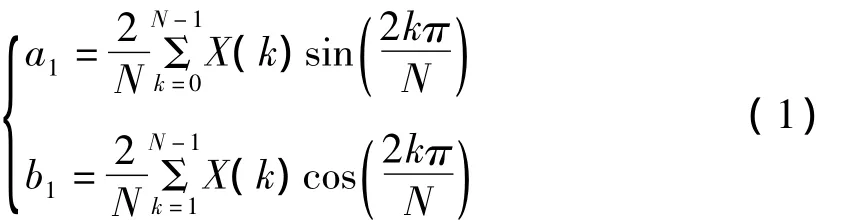
其中,a1是基波的正弦系数;b1是基波的余弦系数;b1+ja1是输入信号X(n)的基波向量;基波的幅值A1和初相角θ1分别为:
初相角θ1可以作为锁相环PLL闭环控制的偏差信号,DFT锁相环控制框图如图2所示。
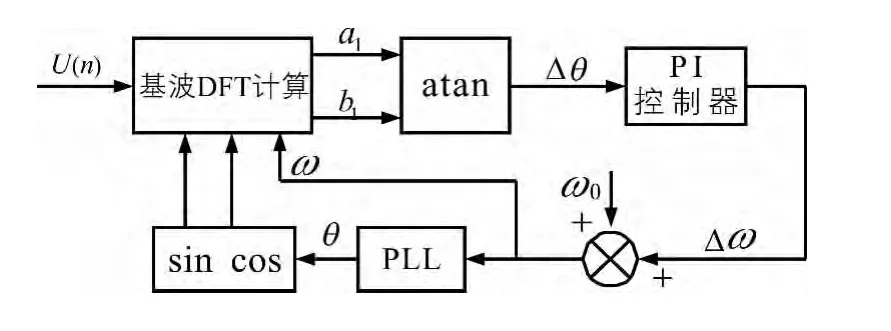
图2 DFT锁相环控制框图
图2中,ω0为电网侧电压的角频率,ω是控制器输出同步信号的角频率,相位差Δθ=θ1。当ω0与 ω相等时,两者的相位差为一常数;当ω0与ω不相等时,相位差呈线性变化。用该相位差作PI控制实时调节输出同步信号频率,可以保证当Δθ减小为零时ω0与 ω相等。采用DFT计算电网电压的相位和幅值时,如果DFT采样周期与电网电压周期不同,则计算的结果可能存在误差,因此在锁相过程中,通过对相位的 PI闭环控制实时调整DFT的采样周期,使其与电网电压保持同步采样[4]。采样需满足如下条件:当电网电压作周期性变化时,每个基波周期的第一次采样在电网电压的正向过零点,并确保电网电压每个周期的采样点数保持不变。
锁相环PLL控制器的输出为sin(wt+Ø),当Ø=0时,其功率因数为1,改变Ø的值可改变输入电压与输入电流的相位差,即可设定高频PWM整流器的功率因数。
2 控制系统设计
2.1 控制系统硬件设计
系统硬件电路图如图3所示,单相高频PWM整流器的硬件系统由电源模块、全桥模块、输入滤波模块、通讯模块、模拟信号处理和采集模块、开关驱动和保护模块、控制模块等部分组成。
高频PWM整流器的数字控器采用TI公司的TMS320F28335芯片实现。该芯片各方面性能完全可以满足高频PWM整流器控制系统中实时性和可靠性的要求[5]。
系统可以实时测量并显示高频PWM整流器的功率因数,将检测到的输入电压和电流信号通过滞环过零比较器获得同步方波,通过DSP的高速捕获端口捕获输入电流与电压之间的相位差,从而计算出当前功率因数。
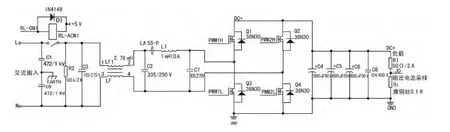
图3 系统硬件电路图
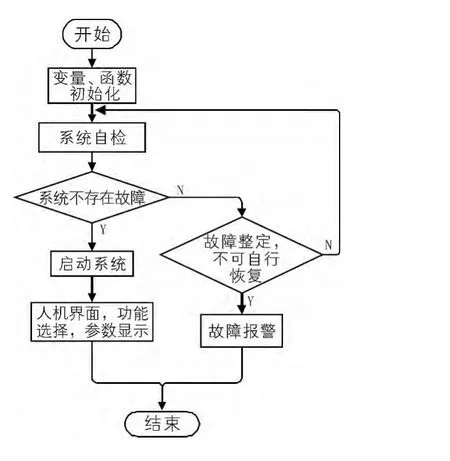
图4 主程序流程图
2.2 控制系统软件设计
控制系统的软件设计如图4、图5所示,由主程序和中断处理程序2部分组成。
①主程序流程图:在系统上电后进行DSP内部资源、相关变量及硬件保护的相关功能的初始化,并进行延时,待系统稳定工作后,系统自检参量校正,判断系统工作环境是否满足要求,若不满足,系统不启动,当条件都满足后,系统启动,并进入系统循环程序。②中断程序:周期性进入中断函数,检测交流电瞬时电压值和相位,通过输入给定值与输出电压值比较,进行电压环控制,利用输入电压与电感电流相位进行PI控制,使其功率因数满足要求。
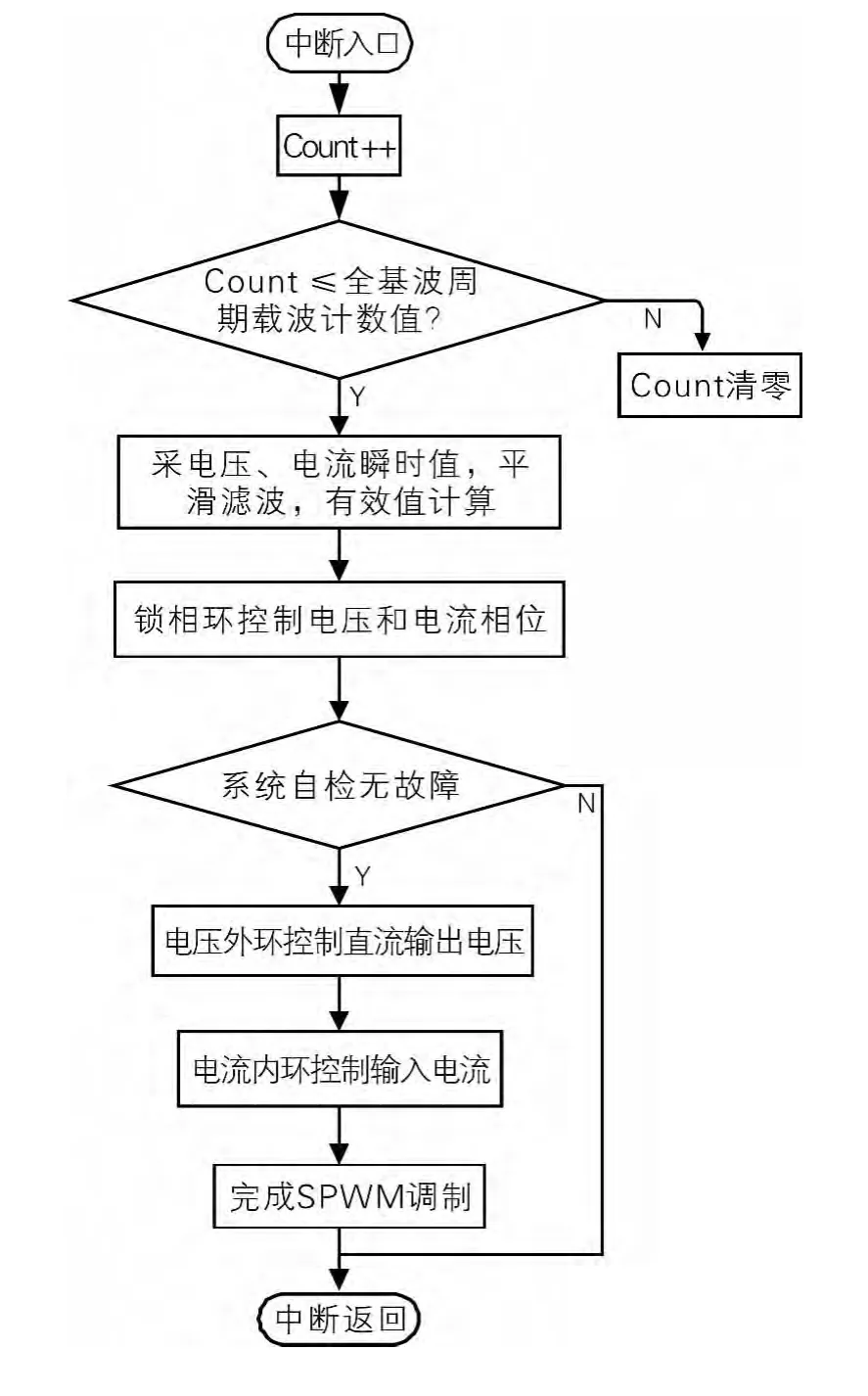
图5 中断程序流程图
3 系统仿真和实验
3.1 仿真
为了验证理论的正确性,通过Matlab/Simulink对高频PWM整流器进行了仿真研究,设其参数如下。
单相输入电压源:频率50 Hz,电压有效值24 V。
输出直流电压给定值:电压平均值36 V。
交流侧电感:L=1 mH。
输出直流侧滤波电容:10 000μF。
负载参数:阻性负载18Ω。
开关频率:20 kHz。
仿真中得到期望的输入电压、输入电流和直流输出电压波形,控制系统仿真波形如图6所示。
由图6可知,输入电压和输入电流波形的相位基本一致,输入功率因数近似为单位功率因数,且直流输出电压稳定在36 V。
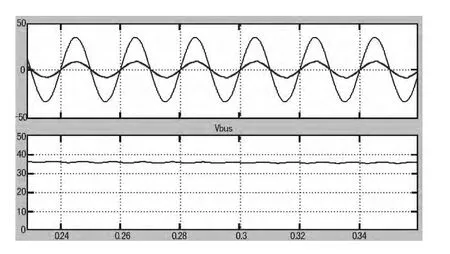
图6 控制系统仿真波形
3.2 实验结果
实验中交流输入电压为24 V,输入电感1 mH,直流输出电压由 PI控制器控制在 36 V,开关频率10 kHz。实际电路中直流输出接3个2 200μF/50 V的电解电容,并并联了一个0.1μF的无感吸收电容,吸收浪涌和尖峰电压。功率因数为1时的输出波形如图7所示,从图7中可看出,实际的交流输入电压和电流波形相位一致,输出电压稳定在36 V;功率因数为0.8时的输出波形如图8所示,从图8中可看出,实际的交流输入电压和电流波形有一定的相差,实现了功率因数可调,且输出电压也稳定在36 V。
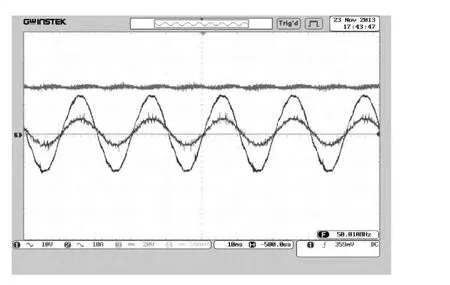
图7 功率因数为1时的输出波形
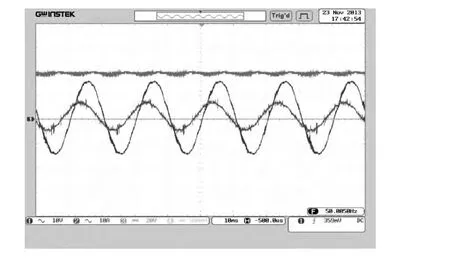
图8 功率因数为0.8时的输出波形
4 结论
基于数字信号处理器TMS320F28335的高频PWM整流器的硬件结构简单,软件采用数字控制技术,实时性强,稳定性高,且开发容易,完全可以应用于大功率整流电路。
[1] 周亚群,付周兴,张钢.PWM整流器电流控制策略仿真比较[J].工业控制计算机,2012,25 (1):110-111,114.
[2] 贺博,程善美,龚博.单相混合三电平PWM整流器的研究[J].电气自动化,2012,34(1):52-55.
[3] 康晓月,王明泉.基于DSP的开关电源设置[J].电源技术,2010,34(11):1183-1185.
[4] 邹雪涛,蔡丽娟.开关变换器中数字控制设计方法的研究[J].通信电源设计,2006,25(11):19-22.
[5] 程善美,万淑芸,段正澄.基于DSP的单相PWM整流器[J].仪表技术与传感器,2008(2):56-57,60.
猜你喜欢
科学家(2021年24期)2021-04-25
测控技术(2018年9期)2018-11-25
电测与仪表(2016年5期)2016-04-22
电测与仪表(2016年5期)2016-04-22
电测与仪表(2016年9期)2016-04-12
电测与仪表(2016年14期)2016-04-11
通信电源技术(2016年4期)2016-04-04
电源技术(2015年1期)2015-08-22
电测与仪表(2015年9期)2015-04-09
电测与仪表(2015年12期)2015-04-09