多功能智能清洁运动小车的设计
2014-03-17 10:32肖新华袁友利张文丽杨秀芝
湖北理工学院学报 2014年2期
肖新华,袁友利,张文丽,杨秀芝
(湖北理工学院机电工程学院,湖北黄石435003)
0 引言
为吸引青少年参与家务劳动,设计了清洁运动小车,其包含2种工作状态,即娱乐和家用,2种工作状态可相互自由转换。为改变扫地、拖地施力方式及满足节能环保要求,小车既可依靠腿部施力工作,也可智能地进行打扫,具有扫地、拖地、擦地等功能。
设计的清洁运动小车以运动车为依托,扫地、拖地、擦地工具可以上下调整,以满足不同人群及占用空间小的要求,为适应不同的工作场合,拖地部分对地面的压力可自动调节[1]。
1 清洁运动小车系统的工作原理
通过对清洁运动小车结构、电路系统的不断优化,与目前市场上的家用机器人相比,该清洁运动小车在功能、效率上有很大的提高,具体体现在以下几个方面:
首先,该清洁运动小车根据需要可以采用不同的工作模式。小车有3种不同的工作方式:①智能清扫功能;②运动和清扫功能;③运动功能。
其次,该清洁运动小车可有效地完成各项清扫工作,包括扫地、拖地、擦地、废物回收、清水自动补给、拖地滚筒自我清洗等,实现了高效、智能的功能。小车的最前方是一个扫地刷,可将所有垃圾扫入垃圾箱;中间是一个滚刷,可将地面洗刷干净;后方是一块擦布,可将地面水吸干。
利用PROE软件对清洁运动小车进行了建模和运动仿真分析。仿真分析结果表明:该运动小车设计方案可行,能够实现预设的各项功能。清洁运动小车模型如图1所示。
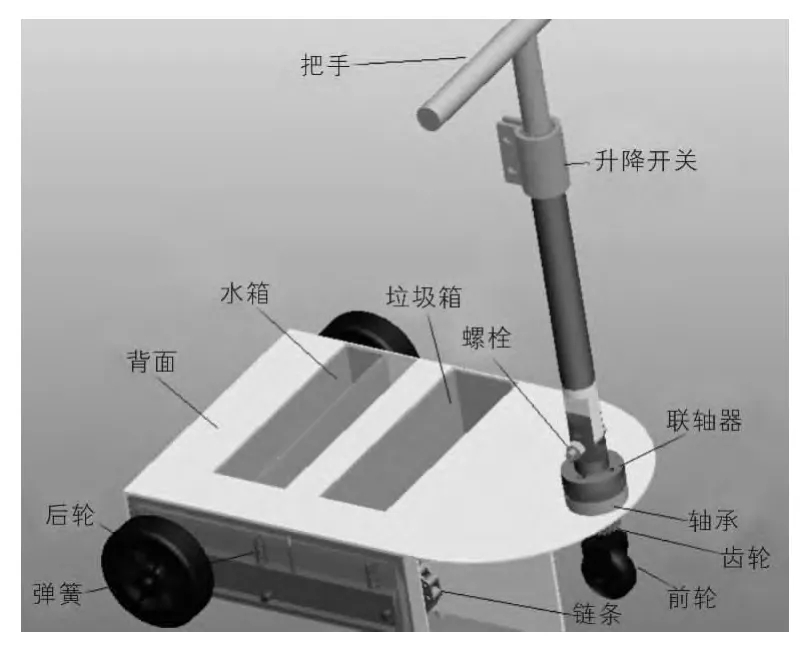
图1 清洁运动小车模型
2 清洁运动小车的机械结构设计
2.1 多功能结构的设计
该清洁运动小车有效地实现了一车多用的设计目的,具有多个工作模式:①运动小车,此时需要撤走一系列的清扫工具,利用小车侧边的调节旋钮将其向上调节,这样就可以使清扫工具远离地面,从而实现运动小车的功能;②运动小车+清扫,此时将旋钮下调即可,使清扫工具与地面接触,从而实现运动和清扫的功能;③智能清扫,此时要用到自动控制装置,本装置由一个单片机和多个电子控制器件组成,实现智能清扫、蔽障的功能。
2.2 传动装置的设计
该清洁运动小车能有效地完成各项清扫工作,整套工作由一系列的传动装置来完成,该传动装置具有可靠性和稳定性高的特点。考虑到装配精度和远距离的传动,传动装置第1级、第2级、第5级采用链传动;考虑到滚筒擦地装置要与小车运动方向相反和实现小车的多功能,传动装置第3级、第4级采用齿轮传动。传动装置如图2所示。
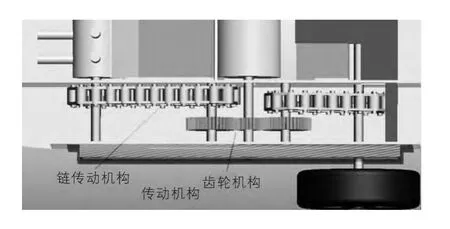
图2 传动装置
2.3 2套转向机构的设计
要实现一车多用的目的,设计转向机构是很有必要的,也是不可或缺的。转向机构采用联轴器进行连接,当运动清洁小车作为运动车使用时,则用销钉将龙头和车身连接在一起;当清洁运动小车作为清洁工具使用时,只需拔出销钉即可。这样,就为清洁运动小车实现一车多用的目的打下了基础。转向机构如图3所示。
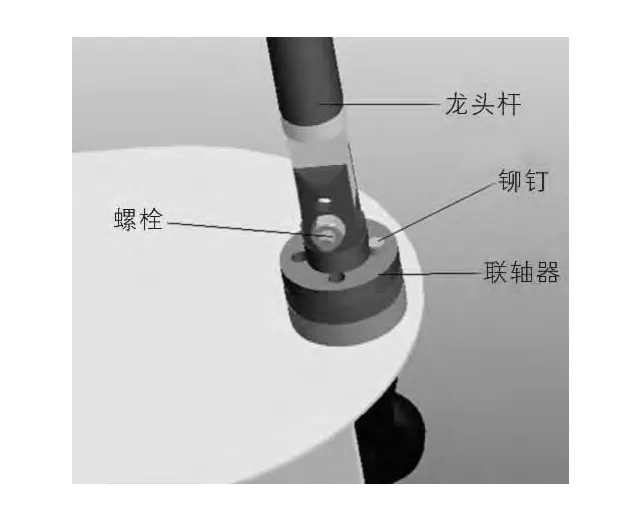
图3 转向机构
2.4 理论设计计算
2.4.1 清洁运动小车的外形尺寸设计
考虑到工作时使用者右脚踏在板面的正中心,清洁运动小车的宽度应以适应人群直立时双脚的间距来设计。运动小车板面宽度定为220 mm;为使使用者踏脚舒适且便于施力,板面距地面的高度不高于150 mm,取清洁状态时高度为100 mm;把手杆距地面高度不高于1 200 mm。前后附加辅助支撑轮向内伸缩,综合考虑内部清洁机构和外形美观因素,清洁运动小车前端做成圆弧,总长为420 mm。
2.4.2 调节弹簧的设计
弹簧在材料选定后,设计时需要计算出弹簧刚度E、中径D、钢丝直径d、有效圈数n和变形量ε。
以弹簧设计为例:
1)弹簧受力[2]。
估算弹簧所受力F'为40 N,考虑制造加工因素,增加1.2倍系数,F=1.2F'=48 N。
2)选材料(一般选用碳素弹簧钢丝65 Mn或琴钢丝)。以65 Mn为例,变形量ε=20。
3)许用应力。
查机械设计手册,考虑到载荷弹簧的材料的抗拉强度σb与钢丝直径 d有关,选择 σb= 2 150~2 450 MPa,取安全系数K=1.2,则σb= 1 791.7~2 041.7 MPa,σb取下限值1 791.7 MPa。
查机械设计手册,取切变模量G=78.8× 103MPa,许用切应力 τs=0.3×σb=537.51 MPa。
4)弹簧旋绕比C。初步选取C=10。
5)钢丝直径[3-4]。

6)弹簧中径。
D=Cd=16.563 mm。
7)弹簧有效圈数。
n=Gd4ε/(8FD3)=6.8,总圈数n总=n+ n1=8.8(n1为安全圈数,取2)。
8)试验载荷。

9)自由高度。
HO=n总t0+1.5d=44 mm(取整)。
其中:t0——初步估计节距,t0=d+ε/n+ δ1(δ1=0.1d)=4.76。
10)节距。
t=(HO-1.5d)/n=4.26 mm。
11)弹簧螺旋角(一般为5°~9°)。
α=arctan(t/(πD))=6.5°。
12)弹簧的稳定性验算(b<5.3,即可满足稳定性要求)。
b=HO/D=2.66。
13)弹簧刚度。
E=Gd4/(8D3n)=2.42 N。
14)弹簧载荷。
B=E×ε=48.4 N。
3 清洁运动小车的电路设计
3.1 清洁运动小车的主体电控设计
整个系统由1个STC89C51单片机、1个超声波模块、2个型号为42BYGH4417的步进电机、1个细分器和1个L298N组成。
通过单片机给细分器发送脉冲,细分器可控制步进电机的运动,再通过链轮链条提供清洁运动小车前进的动力,同时给扫地装置提供工作的动力。
超声波模块不断检测车前是否存在障碍物,当检测到障碍物时,超声波模块反馈信号给单片机,实现自动避障[5-9]。
3.2 清洁运动小车的驱动控制设计
清洁运动小车主要采用电机控制。由于在控制步进电机时,只需要按照一定的规律向步进电机提供脉冲信号,省去了处理测速传感器的环节,这样就将直流电机的闭环控制变成了开环控制,因此采用型号为42BYGH 4417的步进电机控制驱动轮子。
通过脉冲和转动角度的精确比例关系,可以非常方便地计算出小车的位移;而步距角W是固定的或可以设定,只要知道脉冲数量N就可以计算出小车的位移S。同样,根据脉冲的周期就可以计算出小车的速度。
通过步进电机,可以随时计算出小车转动的速率,从而精确地控制小车的转向、速度和行走路线,本文使用链轮链条将步进电机与车轮连接起来。
3.3 电路设计
清洁运动小车控制电路中最重要的是超声波蔽障模块,车前的超声波模块不断检测车前是否存在障碍物,当检测到障碍物时,超声波模块反馈信号给单片机,带动步进电机转动,从而实现小车的转弯。小车控制电路图如图4所示。
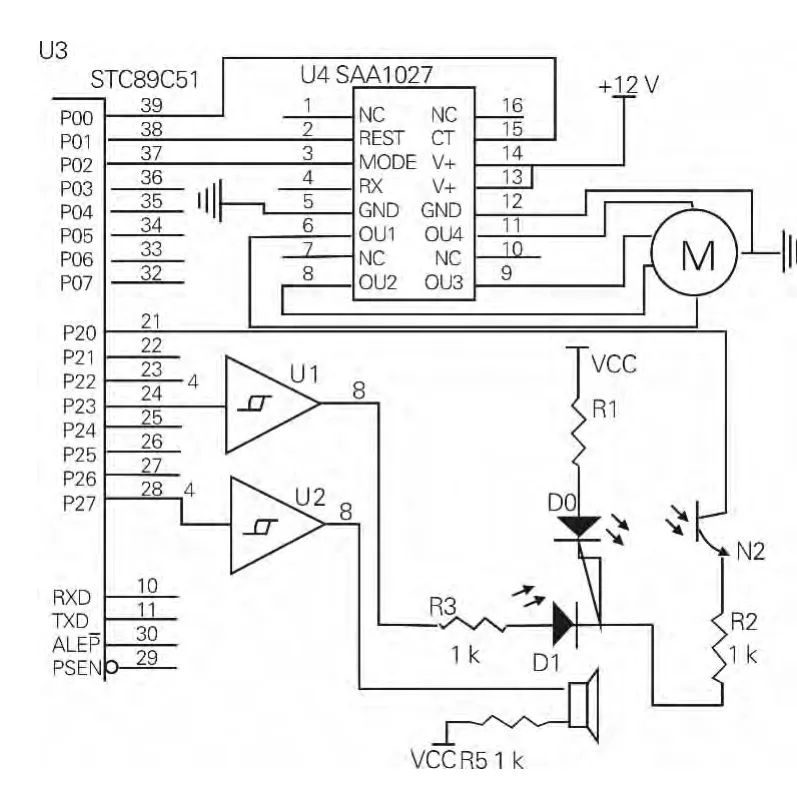
图4 小车控制电路图
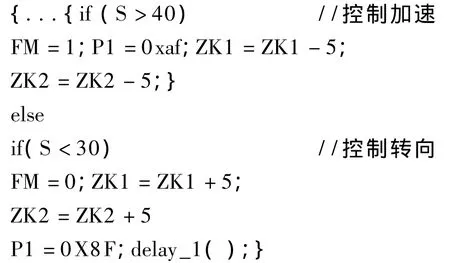
3.4 部分设计程序
部分设计程序如下:
3.5 典型电子元器件主要技术参数
1)超声波模块技术参数如表1所示。
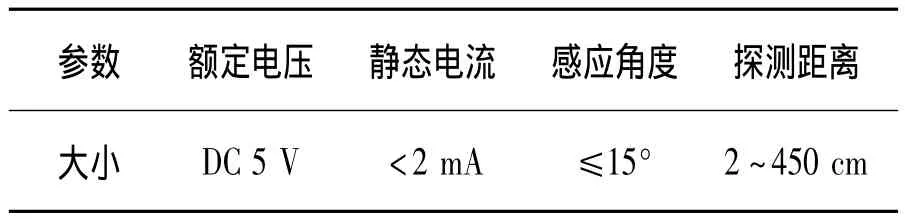
表1 超声波模块技术参数
2)步进电机42BYGH4417的参数如表2所示。
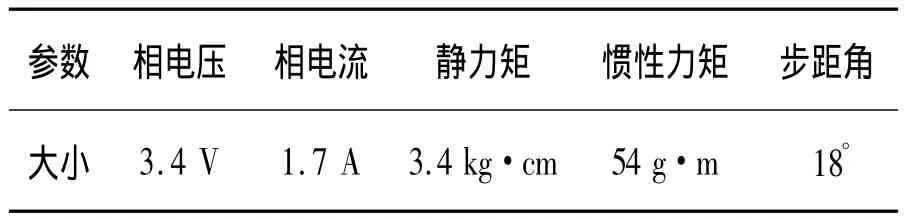
表2 步进电机42BYGH 4417的参数
3)L298N模块主要参数如表3所示。
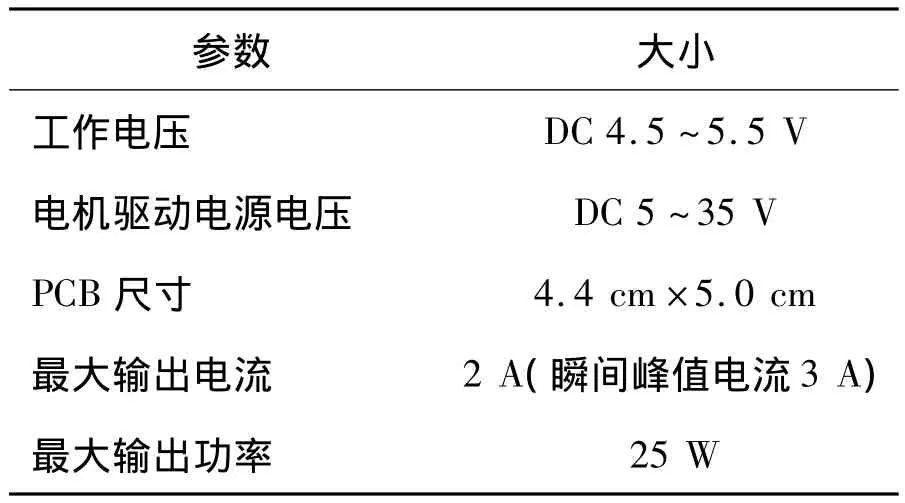
表3 L298N模块主要参数
4)驱动器DM542 128细分参数如表4所示。

表4 驱动器DM542 128细分参数
4 结论
本文设计的是一款家用与娱乐相结合的清洁运动小车,该小车有助于从小培养青少年热爱生活、爱护卫生、勤于做家务的好习惯。设计的清洁运动小车功能齐全,结构紧凑,集扫地、拖地、清洗、干燥等功能于一体,工作效率高。它不仅改变了通常工作时的施力方式,实现了智能化,大大减少了手臂的劳动负荷,使工作更加轻松,而且适用人群广,操作简单方便,节能环保,有益于人体健康;还可根据不同的清洁要求随意调整清洁程度。如若推广,该清洁运动小车将填补国内娱乐家用产品的空白。
[1] 苏敏,梁银丽,汪道辉.基于路径记忆算法的智能小车控制系统的设计[J].哈尔滨理工大学学报,2011,16(1):64-68.
[2] 陶洪浩,刘俊.基于目标识别的智能小车定位方法研究[J].电脑知识与技术,2011 (1):180-181.
[3] 冯惠秋,吕宁,黄帅峰.多功能智能小车的设计[J].职业,2011(3):107-108.
[4] 濮良贵,纪名刚.机械设计[M].北京:高等教育出版社,2006:10-25.
[5] 魏兵,熊禾根.机械原理[M].武汉:华中科技大学出版社,2007:5-30.
[6] 李金山,李琳,谭定忠.清洁机器人概述[M].哈尔滨:哈尔滨工程大学出版社,2005:15-60.
[7] 王洪,银金光.工程力学[M].北京:希望电子出版社,2006:175-300.
[8] 郑玉华.典型机械产品构造[M].北京:科学出版社,2004:230-400.
[9] 邓英剑,杨冬生.公差配合与测量技术[M].北京:国防工业出版社,2008:25-241.
猜你喜欢
故事作文·低年级(2022年10期)2022-12-31
数学小灵通(1-2年级)(2022年3期)2022-03-17
学苑创造·A版(2022年2期)2022-01-29
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
文苑(2018年22期)2018-11-19
电子制作(2018年8期)2018-06-26
童话世界(2017年8期)2017-05-04
数学大王·低年级(2016年7期)2016-05-14
长江大学学报(自科版)(2014年4期)2014-03-20