
基于NURBS的复杂曲线多轴运动控制轨迹生成的研究
2014-03-09 02:06韩庆瑶赵忠华
机床与液压 2014年8期
韩庆瑶,赵忠华
(华北电力大学机械工程系,河北保定 071003)
基于NURBS的复杂曲线多轴运动控制轨迹生成的研究
韩庆瑶,赵忠华
(华北电力大学机械工程系,河北保定 071003)
为了提高具有复杂曲线形状产品的设计和加工水平,在NURBS曲线建模理论的基础上,借助于MATLAB数学计算软件建立了复杂曲线的数学模型,并对生成的复杂曲线进行了多轴控制轨迹生成的研究。结果表明:生成的复杂曲线具有较高的精度和生成速度,能够对实际产品的数控加工起到一定的指导作用。
复杂曲线;NURBS建模;多轴控制
随着科学技术的快速发展和进步,具有复杂曲线曲面形状的产品越来越多,需要提高复杂曲线曲面的设计和加工水平,以便获得更高的加工效率和更好的加工质量。因此复杂曲线曲面的造型技术与曲面的数控加工成为 CAD/CAM技术的一个重要研究方向[1-2]。
在工业生产中,运动控制系统既可以有效地提高产品的质量,也可提高产品的产量。例如,生产过程中对机器人手的定位控制;数控加工过程中的控制;热轧厂中对金属板厚度的控制等。然而对数控系统来说,最重要的是控制各个轴电机的协同运动,只有运动控制器接收并依照数控装置中的指令来控制各个轴电机的运动才能实现数控加工,数控加工中的定位控制的精度、速度调节的性能等重要指标都与运动控制器直接相关[3]。
文中以非均匀有理B样条(NURBS)方法为基础,研究了NURBS曲线的造型方法。推导出了二次NURBS曲线的矩阵表示形式,并通过对曲线上已知的有限型值点进行插值得到了曲线插值点,并将这些插值点导入到多轴控制系统的控制软件中进行了曲线的多轴控制轨迹生成的研究。
1 NURBS曲线建模
1.1 NURBS曲线的定义
一条K次NURBS曲线定义为[4-5]:
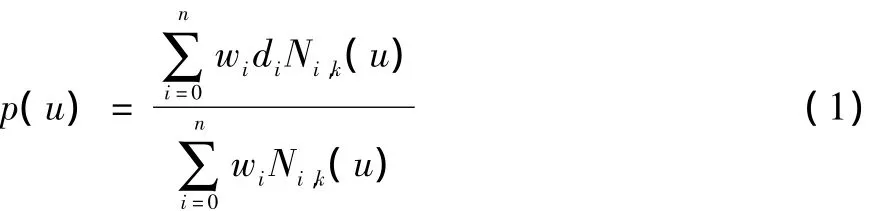
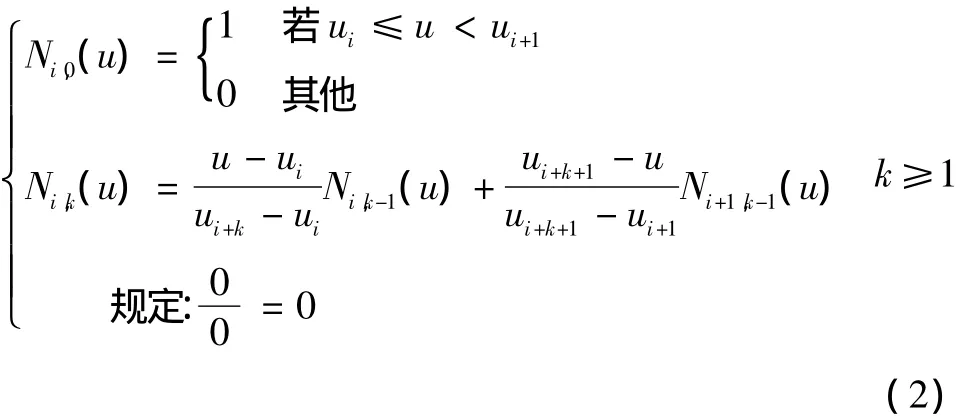
式中:wi称为权因子;di为NURBS曲线的控制顶点;Ni,k(u)是定义在非周期节点矢量U上的k次B样条基函数。其中U=[u0,u1,…,un+k+2]按德布尔-考克斯递推公式推导的k次规范B样条基函数如下:
1.2 NURBS曲线的矩阵表示形式
下面以二次NURBS曲线为例推导其矩阵表示形式[6]。
根据曲线定义引入算子Δ,其中:
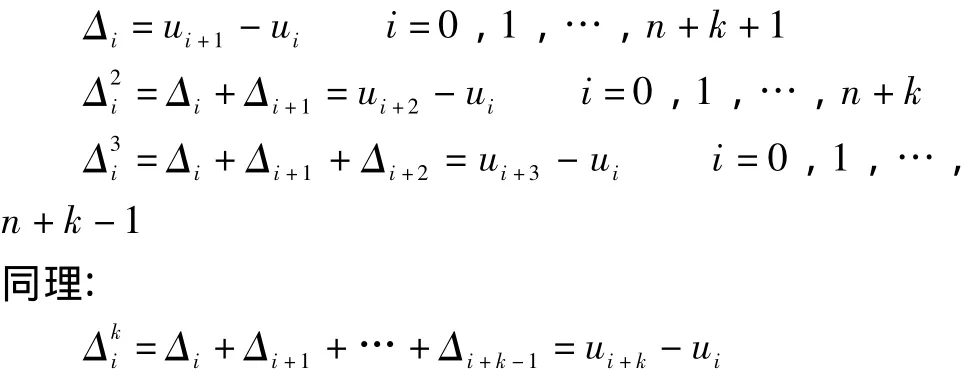
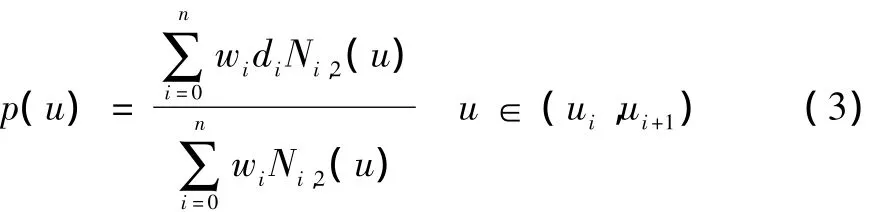
当k=2时,二次NURBS曲线表达式即为:
利用德布尔算法的递推公式,可得二次NURBS曲线的矩阵表示形式:
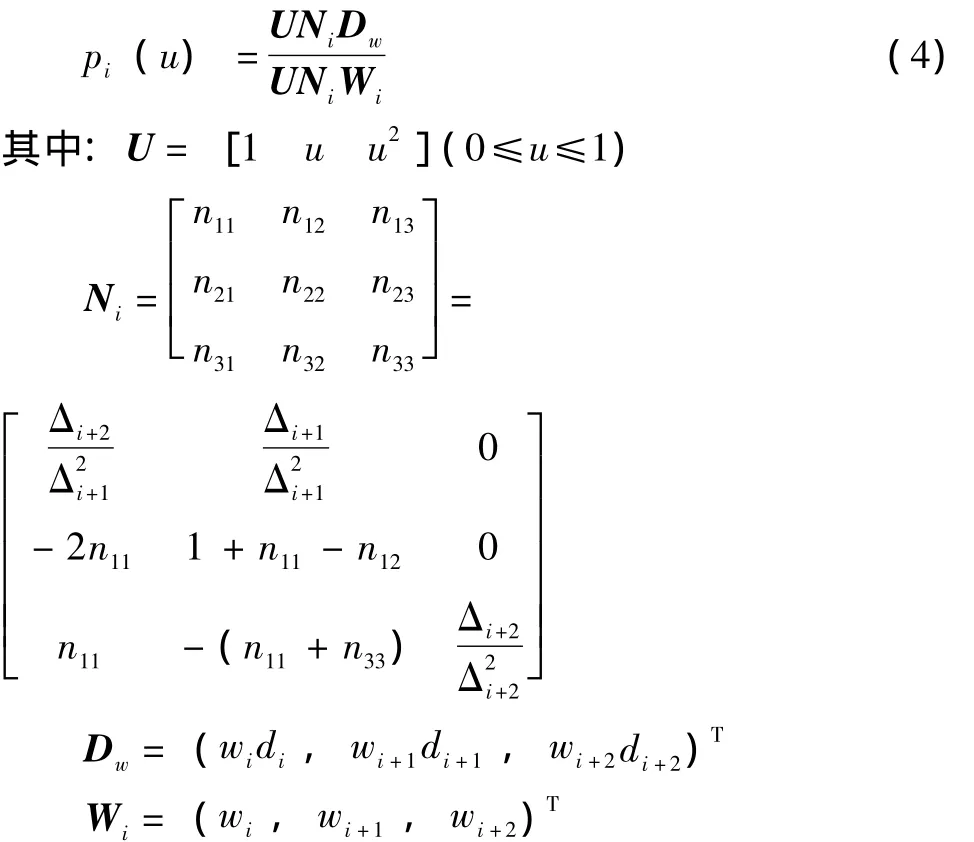
同理3,4,…,n次NURBS曲线的矩阵形式也可通过上述方法推导出来。通过以上推导的NURBS曲线的矩阵表示形式,便可生成所需要的复杂曲线。
2 多轴控制系统
以国内某厂商生产的多轴控制器为核心,对多轴控制在数控加工中的插补算法进行研究,研究结果表明此控制系统具有良好的控制速度和控制精度,能够很好地应用于数控加工系统中。
2.1 系统概述
整个系统的主要构成如图1所示。系统的核心是Baldor公司NextMove e100运动控制器,与其他控制器相比,它的处理速度更快、效率更高。整个系统通过便于操作的控制软件进行编程,可以有效地完成加工任务的需求。此结构以步进轴、模拟轴和CANopen作为局部网络,TCP/IP则用作为电脑或PLC等类型设备的主机接口,用于配方数据交换、控制、监控或可视化操作等[7]。
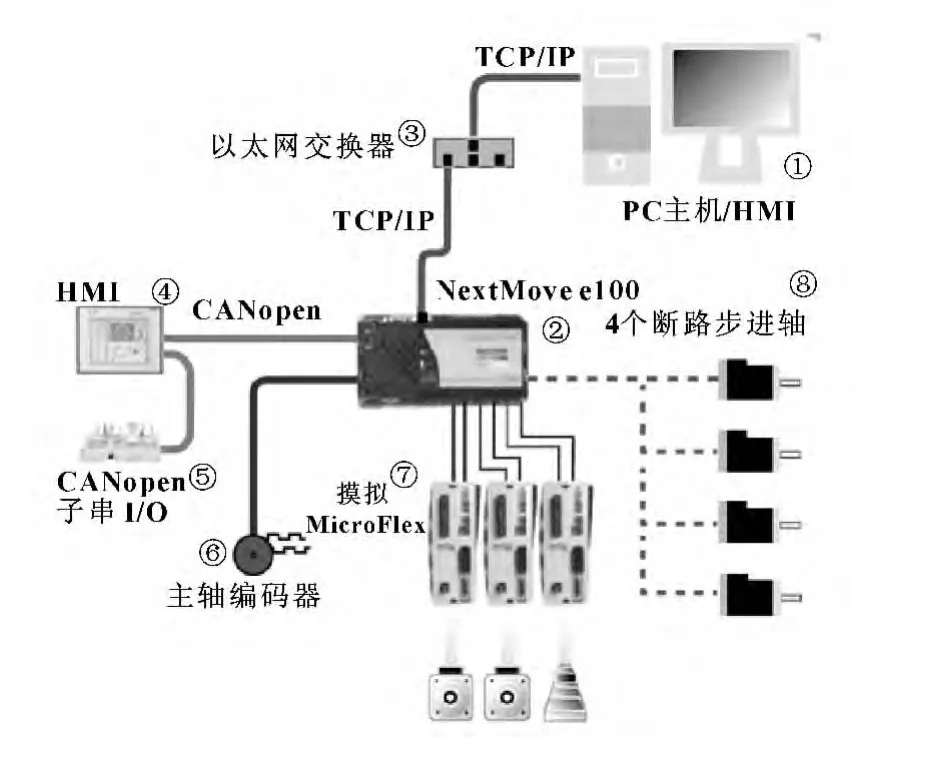
图1 系统构成结构图
2.2 系统硬件设计
2.2.1 PC主机/HMI
人机界面 (HMI)是技术人员与控制系统间进行交互的设备,是信息交换的媒介,它实现信息的内部形式与人类可以接受形式之间的转换[8]。
2.2.2 NextMove运动控制器
文中采用NextMove运动控制器,此运动控制器的核心是Mint运动程序设计语言,它提供了一种高水平、易使用的压缩多轴运动控制。Mint可使Next-Move运动控制器在无需个人计算机或可编程逻辑控制器 (PLC)的条件下独立运行,增强了系统的灵活性[9]。
NextMove结构使用浮点数字信号处理器 (DSP)技术加上一个现场可编辑门阵列 (FPGA)。FPGA负责处理通常为外部离散逻辑器件保留的功能,例如输入/输出/编码器反馈和步进电机脉冲发生。组合的DSP和FPGA内核使NextMove很容易地解决最复杂的应用。
2.2.3 伺服驱动器
伺服驱动器是用来控制伺服电机的一种控制器,其作用是驱动伺服电机进行有效的运动,伺服电机可以采用位置、速度和力矩3种控制方式,主要应用于高精度的定位系统之中。
Baldor驱动器被设计成从包装里取出即可使用。随同启动基于Mint WorkBench的窗口和向导可以引导操作员完成所有的调试步骤。全自动的电流协调、速度和位置调谐能够使系统快速启动和运行,以便达到最佳状态。
2.2.4 伺服电机
伺服电机是指在伺服系统中控制机械元件运转的发动机。伺服电机可以通过内部编码器的反馈作用使电机的控制速度、位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。在自动控制系统中用作执行元件,把所收到的电信号转换成电动机轴上的角位移和角速度输出。
2.3 系统软件设计
一直以来人们都认为Basic是全球范围的程序设计语言。然而。Mint完全包含了所有现代Basic程序设计的功能性,诸如多任务处理、多个功能和子程序、多种数据类型和本地数据等。该功能使得不同应用中易理解、易维护、易重复使用的模块程序的编写和开发变得更加简单。Mint新代码库可以存储代码片段,允许其他项目采用该代码片段,因而使代码重用变得更加简单。
2.3.1 通过ActiveX进行的Windows程序设计
Mint ActiveX(链接与嵌入技术)工具为基于PC的自动化提供了一个工具箱。使用CJHJ、Visual Basic、Visual C++、LabVIEW或其他任何符合ActiveX的开发工具对Mint应用进行基于PC的控制,包括机器控制的各HMI特征显示、多轴轨迹数据的计算以及经过PCI或USB至控制器的数据流动。
Mint ActiveX控制与Mint语言共享一个应用编程接口 (API)。当以不同的语言开发时,Mint中的同一关键字可在ActiveX库文件中找到,易于移动程序因而缩短了开发不同语言的时间。除提供对Mint命令的访问外,ActiveX控件还提供对固件、程序下载等部件的诊断、事件、系统配置和维护功能的连接使用[10]。
2.3.2 应用开发工具
Mint WorkBench为Windows前端提供了所有Baldor的产品,包括NextMove运动控制器、伺服驱动器和矢量驱动器的单一的安装开发工具。Mint Work-Bench的关键字加重和上下文帮助功能提供了一种简单使用Windows开发前端进行Mint程序设计的方法。无论情况多复杂,程序导航器都能很容易地对源程序进行定位。
功能包括:
(1)单一工具适用于所有Baldor运动和伺服驱动器;
(2)网络配置和驱动器配置;
(3)用于快速开发程序的程序导航器;
(4)用于常用Mint代码的再使用的代码库;
(5)用于简化调谐和诊断的软件示波器;
(6)用于监控变量和任务的观察窗口;
(7)用于快速技术支持且能自动生成电子邮件的SupportMe功能。
2.3.3 监控诊断和调试工具
SPY窗口能提供许多简单的监视和测试特征,这些特征已经编入到制表符中。默认制表符显示了有用的轴状态信息,并允许用户选择其中的轴以进行监控。其他的制表符具有如下特征:
(1)对等通信数据交换;
(2)CANopen网络状态;
(3)现场总线监控;
(4)带有6个用户配置读书器的监控窗;
(5)输入/输出状态监控。
3 实验结果分析
汽轮机叶片是典型的复杂曲面零件,作为汽轮机的核心部分,汽轮机叶片的加工质量和效率对汽轮机组的安全性和经济性起着重要作用,研究汽轮机叶片的建模和如何对其进行加工具有重要的现实意义。以某一型号的汽轮机叶片截面为研究对象,对其进行NURBS建模及多轴运动控制轨迹生成的研究。并选取叶片截面上的型值点生成了叶片的截面图,由于NURBS曲线建模的精度受到所选取的型值点数量的影响,文中分别选取截面上的两组型值点对曲线进行了建模。
当选取曲线上的28个型值点时得出的NURBS建模曲线图如图2所示,图3描述的是将图2中拟合效果不好的地方进行细分后生成的曲线截面图。从图2—3中可以看出:NURBS曲线的建模精度与型值点的选取密切相关,型值点选取是否准确直接关系到NURBS曲线的建模精度。
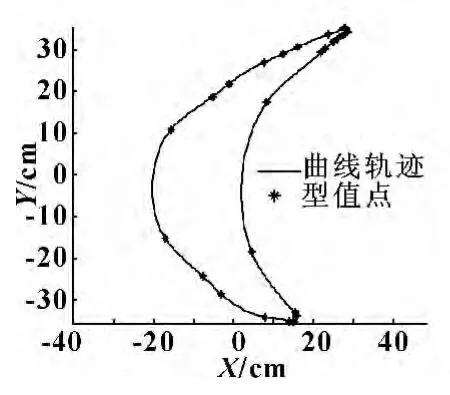
图2 汽轮机叶片截面NURBS曲线图
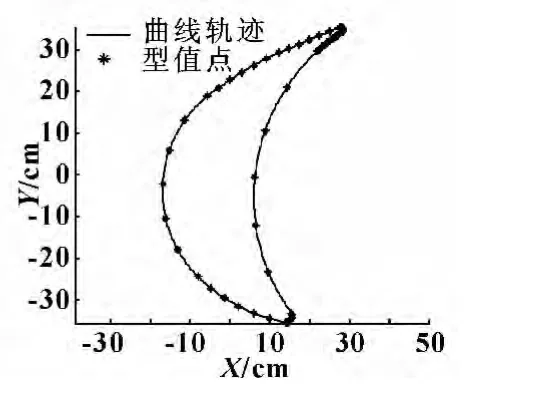
图3 细分后的汽轮机叶片截面NURBS曲线图
从以上两图的对比可以看出:细分后所生成的截面曲线具有比较好的拟合效果,完全可以应用于多轴控制系统中。通过编程得到的多轴运动控制轨迹如图4所示。
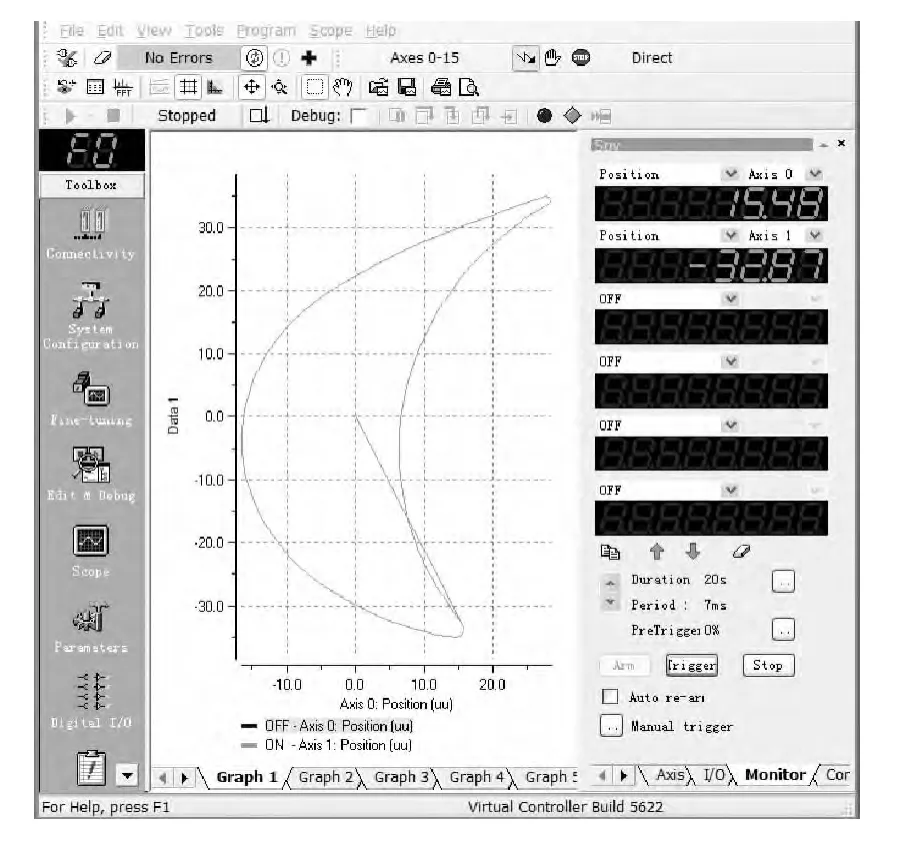
图4 细分后的多轴运动控制轨迹图
图5—7分别描述的是应用多轴控制系统生成截面轨迹过程中,X、Y两轴的插补轨迹、速度和加速度的变化。可以看出:轨迹生成过程中X,Y两轴的速度和加速度变化时是一一对应的。
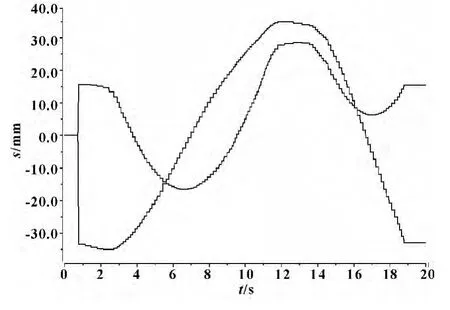
图5 细分后的X,Y两轴的插补轨迹图
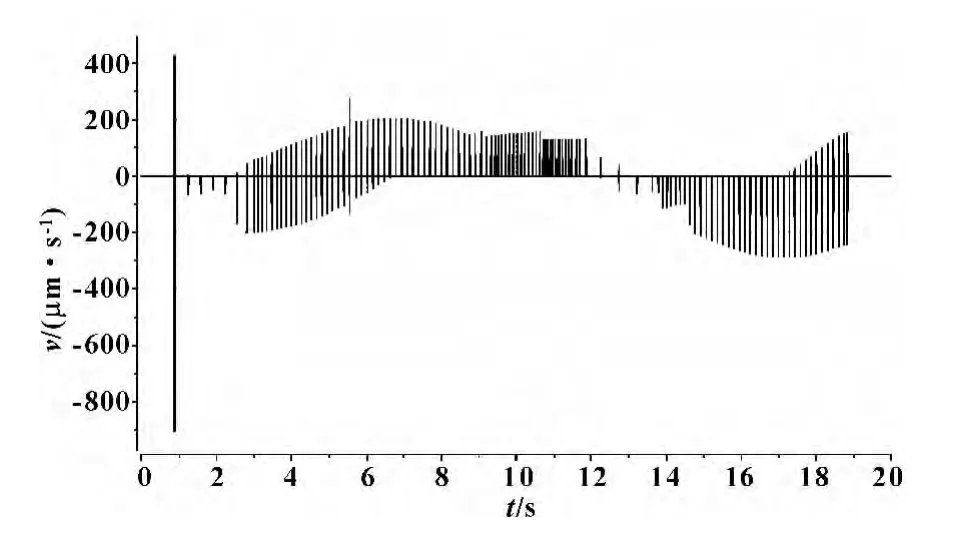
图6 细分后X,Y两轴的速度变化曲线图
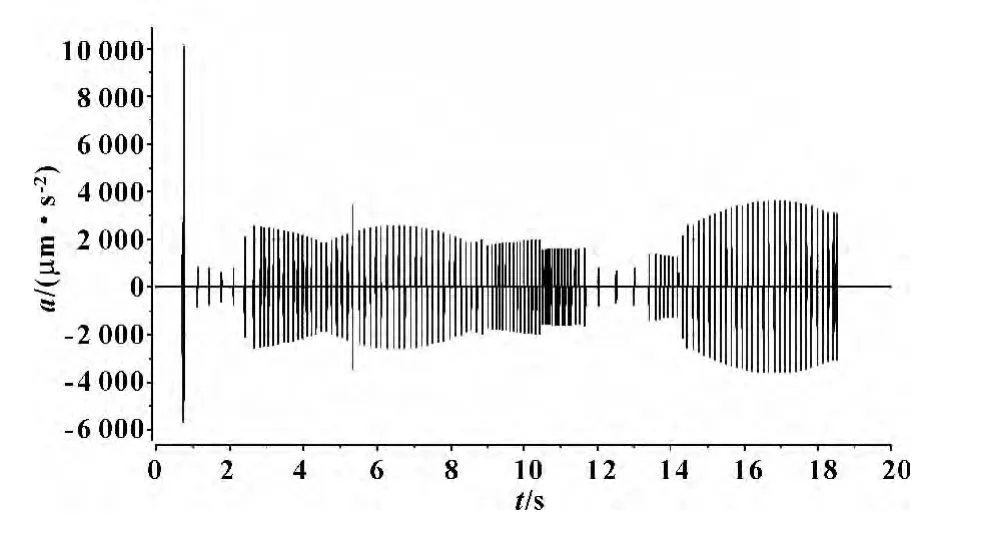
图7 细分后X,Y两轴的加速度变化曲线图
4 结论
以复杂曲线的造型和其多轴运动轨迹的生成为主要研究内容。为准确描述出空间复杂曲线的形状,以NURBS建模理论为基础建立了复杂曲线的数学模型,并将生成的模型与通过多轴控制器生成的复杂曲线的轨迹进行对比。研究复杂曲线的多轴运动轨迹生成对工业生产中具有复杂曲线曲面形状产品的数控加工起到很好的指导作用。
【1】迟立东.NURBS原理及其在造型中的应用研究[D].西安:西北工业大学,2001.
【2】周志雄,周秦源,任莹晖.复杂曲面加工技术的研究现状与发展趋势[J].机械工程学报,2010,46(17):105-111.
【3】曾志迎.复杂曲面的五坐标数控加工关键技术研究[D].太原:太原科技大学机械工程系,2009.
【4】施法中.计算机辅助几何设计与非均匀有理B样条[M].北京:北京航空航天大学出版社,1994:319-404.
【5】朱心雄.自由曲线曲面造型技术[M].北京:科学出版社,2000:113-156.
【6】唐月夏.汽轮机叶片的建模及插补算法研究[D].保定:华北电力大学机械工程学院,2009.
【7】王永青,徐鸿书,刘勇.基于DSP的多轴控制器的研究[J].控制与检测,2005(4):64-68.
【8】王亚丽,刘广亮,李向东,等.基于CPAC多轴运动控制教学平台的设计与实现[J].实验室研究与探索,2012,31(8):19-22.
【9】孙一兰.多轴控制系统的研究[D].沈阳:东北大学机械工程与自动化学院,2005.
【10】宋宝,周云飞.多运动轴协同控制的研究[J].机床与液压,2004(10):141-143.
Study of Multi-axis Motion Controlled Trajectory Generation of Complex Curves Based on NURBS
HAN Qingyao,ZHAO Zhonghua
(Department of Mechanical Engineering,North China Electric Power University,Baoding Hebei 071003,China)
In order to improve the design and processing levels of products that had complex curve shapes,based on the modeling theory of NURBS curve,the mathematical model of complex curve was established with the help of MATLAB mathematical calculation software,and the multi-axis controlled trajectory generation of the generated complex curve was studied.The results show that the generated complex curve has high precision and generated speed.It provides guiding role in the CNC machining of actual products.
Complex curve;NURBS modeling;Multi-axis control
TH-39
A
1001-3881(2014)8-106-4
10.3969/j.issn.1001-3881.2014.08.035
2013-03-18
韩庆瑶 (1954—),男,工学博士,教授,研究方向为CAD/CAM及机电一体化。E-mail:s2112224014@ 163.com。
猜你喜欢
微特电机(2020年11期)2020-12-30
数学年刊A辑(中文版)(2019年1期)2019-01-31
数学物理学报(2018年5期)2018-11-16
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26
广西电力(2016年4期)2016-07-10
浙江大学学报(工学版)(2016年10期)2016-06-05
工业设计(2016年4期)2016-05-04
工业设计(2016年6期)2016-04-17
华东师范大学学报(自然科学版)(2014年1期)2014-04-16
