悬空波导的激光雷达探测能力个例研究
2014-03-08 05:31马征征王晓宾
电波科学学报 2014年5期
马征征 王晓宾
(中国电波传播研究所 电波环境特性及模化技术重点实验室,山东 青岛266107)
引 言
激光雷达作为一种遥感探测设备,能够始长期通过测量对流层大气温度和湿度来间接获取大气折射率.早在20世纪70年代,美国宾州州立大学已开致力于研究可用于测量电波环境的拉曼激光雷达[1],其第三代和第五代系统于1990至2002年间参与了十几项行动计划.同时科研人员还将其第五代激光雷达系统和无线电探空仪的探测结果进行了比对[2].比对结果表明,激光雷达系统具有精确、连续、即时、实时、无需额外支持(如气瓶、气球)、不怕风以及无准备时间等诸多优势,但其问题是垂直分辨率较低且白天噪声大.另外,英国奇尔波顿天文台于2002年研制了一套用于探测大气波导的紫外拉曼激光雷达系统[3].21世纪初,瑞士联邦理工学院也研制了探测大气温度和湿度的移动型拉曼激光雷达系统[4].
相比传统手段,激光雷达虽然具有连续、即时和遥感等诸多优点,但其目前在某些方面仍有待加强和改进.例如,受光路结构限制,激光雷达通常具有一定的探测起始距离,这一定程度上限制了贴地波导的探测.同时,激光雷达的探测原理表明,其接收信号强度大致与探测距离的平方成反比关系.因此,相比贴地波导,处于更高高度的悬空波导对探测系统性能提出了较高要求.另外,鉴于大气波导较窄的层高(约十几米至几十米),对激光雷达的空间分辨率也提出了一定要求.
本文将针对一例通过无线电探空仪实测的悬空波导,来仿真考察激光雷达接收信号泊松起伏所引入误差对其探测能力的影响.对于其它能够影响探测精度的因素,如雷达定标、拟合式和经验公式引入、弹性信号和背景噪声混入等,这里不作研究[5].
1 探测原理
采用使用最广泛的拉曼激光雷达[6].其通过振-转拉曼散射信号测量大气湿度,通过纯转动拉曼散射信号测量大气温度.拉曼激光雷达方程为
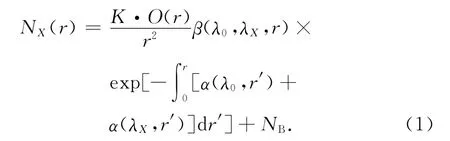
式中:系数K=AN0Δrη,是与距离无关的量;体后向散射系数β(λ0,λX,r)=n(r)σ(λ0,λX);消光系数α=αa+αm;X表示不同的物质种类;其他各量的含义见表1.
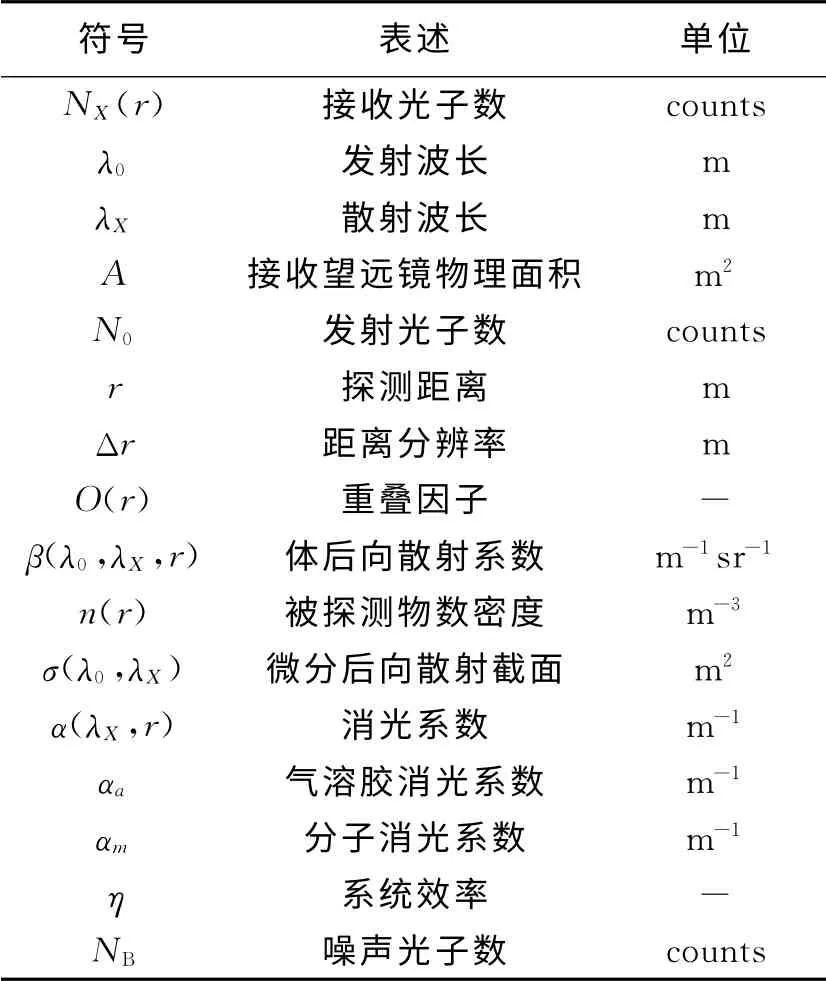
表1 公式(1)所使用的物理量
其中,噪声NB可以通过拟合消除.
对于湿度探测,通常采用对H2O和N2分子两个通道测量结果的比值来确定,有
在完成各个模块的FPGA硬件实现后,先要通过Modelsim进行功能仿真,然后进行板级测试,验证模块功能是否正确。整套系统软硬件测试平台如图10所示。
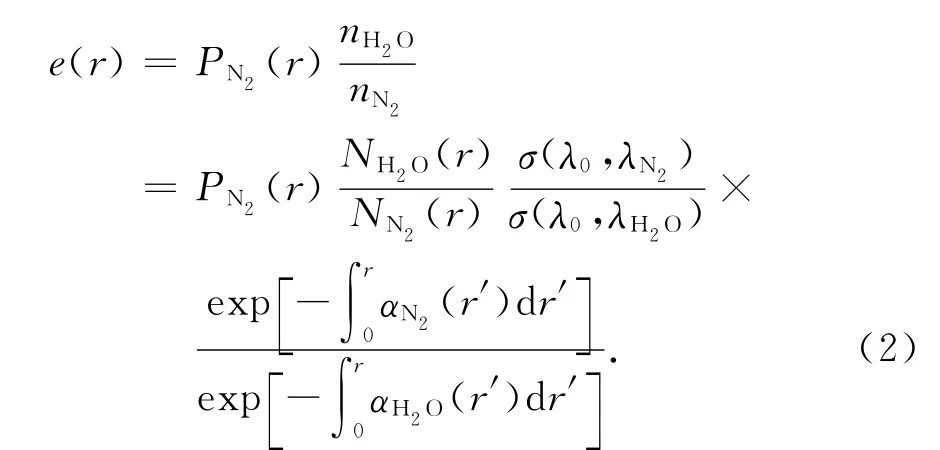
式中:e为水汽分压;PN2为氮气分压,均随高度分布.
对于温度探测,通常采用两个不同波长(或波段内)纯转动拉曼散射信号的测量结果来反演.由于两个通道波长相对接近,消光系数近似相同.两通道比值为

纯转动拉曼散射截面与温度有关,比值中包含了温度信息,即Q=Q(T).再通过与理论计算的或标定的Q-T关系比对,即可得到温度.更具体的反演过程以及散射截面和消光系数的计算可参考早期的工作[5].作为简单情况,设定温度探测中两个通道均探测纯转动拉曼散射的单支谱线.具体设置为氮气的第4和第14支反-斯托克斯转动能级谱,这两根谱线的散射截面与温度成相反变化关系.
相比湿度和温度,气压是相对稳定的量,这里直接使用无线电探空仪的测量结果.为了将地球表面处理成平面,通常使用经地球曲率修正的大气修正折射指数M(单位M-unit).对于30~100GHz范围内的电磁波可计算得到大气修正折射指数为

式中:P、T、e分别是大气压、温度和水汽分压,单位依次是hPa、K和hPa;h是高度;Re是地球平均半径.
对于实际情况,无论是湿度测量还是温度测量,各通道获得的信号(光子数)中包含了起伏噪声.根据激光雷达的探测原理,该噪声服从泊松分布,有

其将会在反演结果中引入误差.式中,N*(r)是无信号起伏时的接收光子数.
2 仿真结果
仿真使用2009年6月17日约9点在广东省汕头市南澳岛通过高空气球探测得到的一例悬空波导,图1给出了该悬空波导的大气修正折射指数高度剖面.
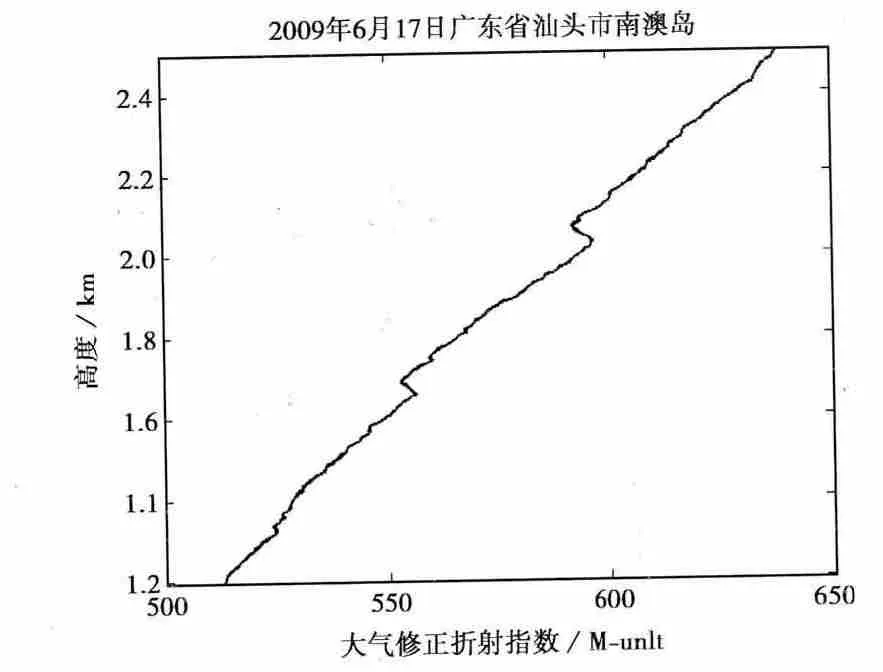
图1 2009年6月17日广东省汕头市南澳岛高空气球探测的大气修正折射指数高度剖面
探空仪时间分辨率为2s,近似匀速上升.2.5 km高度以下对应的高度分辨率为10.4m.其中1 km高度以下的平均高度分辨率为10.7m;而1km高度以上的平均高度分辨率为10.3m.
该次实验中测量到了两个大气波导结构,均属于较弱的例子.其参数如表2所示.这里以较高高度的大气波导为例.
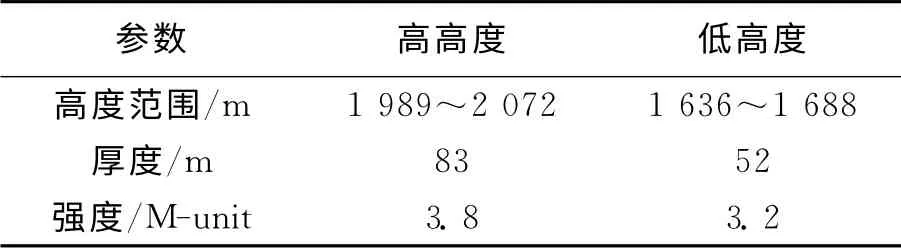
表2 无线电探空仪测量的大气波导参数
对于激光雷达,考虑一套中型系统.采用美国Continuum公司的Surelite系列激光器.具体参数为:发射波长为355nm,重复频率为20Hz,脉冲能量为80mJ;发射累积时间为10min.根据公式

计算得到发射总光子数(~1021).对于中型系统,接收望远镜直径设为40cm.对于大气波导几十米的层高,高度门为200ns即15m.雷达效率简单设定为0.01[7].
按照公式(5)在激光雷达测量湿度和温度的四个通道接收信号中参入泊松分布的信号起伏,并对反演结果使用了宽度为30m的平滑.图2给出了一次加入信号起伏后的探测结果,可以看到激光雷达成功地捕获了该悬空波导.图3给出了另一次加入信号起伏后的探测结果.很明显,由于信号起伏的影响,本次探测未能辨识出该悬空波导.
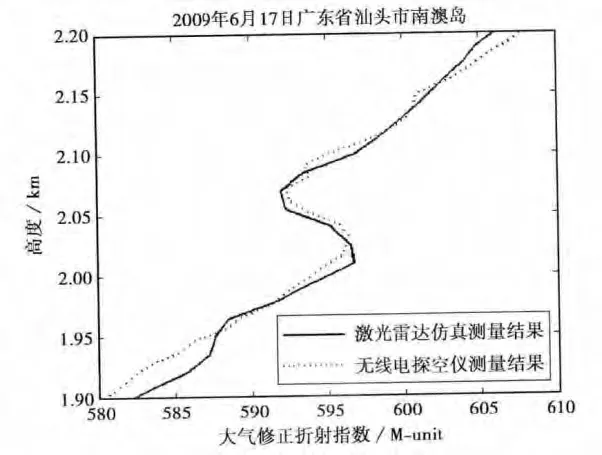
图2 一次激光雷达仿真探测结果(成功捕获到了该悬空波导)
基于蒙特卡洛(Monte-Carlo,MC)方法引入泊松分布的信号起伏,考虑10 000次重复试验,得到激光雷达对该悬空波导的辨识概率,以及波导厚度、波导强度测量结果,如表3所示.
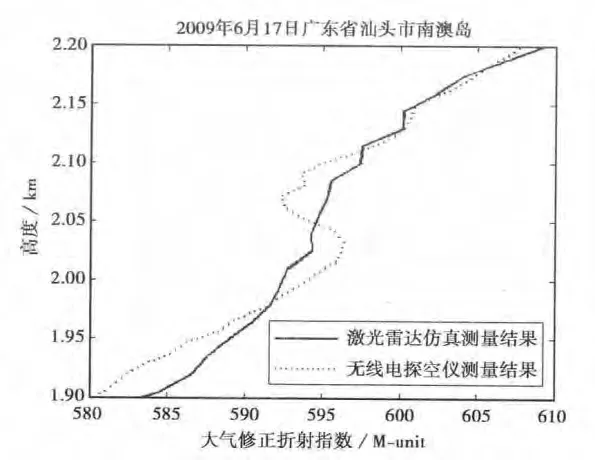
图3 另一次激光雷达仿真探测结果(未能辨识出该悬空波导)
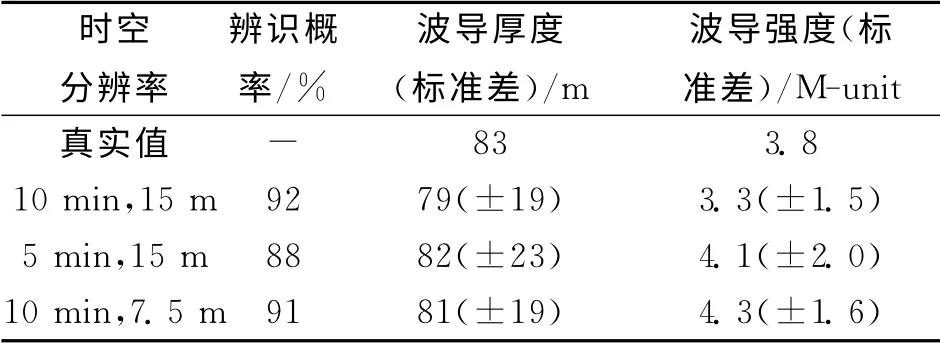
表3 激光雷达仿真测量的大气波导参数
表3结果表明,在时空分辨率为10min和15 m时,激光雷达对该悬空波导的辨识概率较高,达到了92%.层高的测量值也与真实值十分接近.同时,表3还进一步列出了其它时空分辨率下的仿真结果.意料之中的,当探测累积时间减少一半时,激光雷达的辨识概率降低至88%.很明显这是因为随着累积时间的减少,接收信号的光子数同时减少,从而造成信号起伏相对增强.另外,空间分辨能力提升1倍(至7.5m)对辨识概率基本没有影响.这是因为空间分辨能力提升的同时单一高度门内的信号光子数也会减少,从而抵消了空间分辨率能力提升带来的益处.此外,表3结果表明,各时空分辨率情况下,波导强度的测量结果与真实值均有一定程度的偏差.波导强度测量精度应受限于激光雷达系统的整体性能.当然,无论是激光雷达功率孔径积的增大,还是系统效率的提升,均能提高激光雷达系统对大气波导的探测能力.
3 结 论
我们仿真考察了一台中型拉曼激光雷达系统在三种时空分辨率下对一例实测较弱悬空波导的探测能力,包括探测的辨识概率、波导厚度和强度.
仿真结果表明,对于该例较弱的悬空波导,中型激光雷达系统对其具有较高的捕获能力,辨识概率能达到90%左右,且辨识概率随着探测累积时间的增加而提升.同时在三种不同时空分辨率下,雷达系统对波导层厚度的测量结果均十分接近真实值.相比而言,雷达对波导强度的测量值误差要稍大一些,但也是可以接受的.
总的来说,利用激光雷达探测悬空波导能够具有可观的预期.进一步地,我们期望以此工作的个例研究为契机,开展激光雷达对大气波导探测能力的系统研究.当然,这还需要进一步的理论和实验工作.
[1]PHILBRICK C R.EM &EO properties of the lower atmosphere[C]//BACIMO 2003Conference.Monterey,2003.
[2]HARRISOND E.Comparison of Lidar and Mini-rawin Sonde Profiles[D].Monterey:Naval Postgraduate School,1998.
[3]AGNEW J L.Lidar Measurement of Tropospheric Radio Refractivity[R].Radiocommunications Agency Project,2002.
[4]FROIDEVAUX M,SERIKOV I,BURGOS S,et al.A new lidar for water vapor and temperature measurements in the atmospheric boundary layer[J].Asia Flux Newsletter Issue,2009,28:13-17.
[5]马征征,王晓宾,康士峰,等.纯转动拉曼测温激光雷达滤光器参数设计[J].电波科学学报,2012,27(5):937-942.MA Zhengzheng,WANG Xiaobin,KANG Shifeng,et al.Designing filter parameters of pure rotational raman lidar for detecting duct[J].Chinese Journal of Radio Science 2012,27(5):937-942.(in Chinese)
[6]WEITKAMP C.Lidar:Range-resolved Optical Remote Sensing of the Atmosphere[M].Springer,2005:102.
[7]POVEY A C.Development of an optimal estimation retrieval scheme for a Raman lidar system[R/OL].[2013-09-12](2011-12-08)http://www.atm.ox.ac.uk/group/eodg/1st-year-reports/adam-povey.pdf.
猜你喜欢
辽宁省博物馆馆刊(2021年0期)2021-07-23
装备制造技术(2020年1期)2020-12-25
河北省科学院学报(2020年1期)2020-05-25
琴童(2018年2期)2018-03-06
学苑创造·A版(2017年8期)2017-06-24
光学精密工程(2016年1期)2016-11-07
制导与引信(2016年3期)2016-03-20
火控雷达技术(2016年1期)2016-02-06
振动、测试与诊断(2014年5期)2014-03-01
物理与工程(2013年2期)2013-03-11