多级步长光伏电池最大功率点跟踪
2014-03-02 08:12卞建龙
电力系统及其自动化学报 2014年3期
王 平,卞建龙
(河海大学能源与电气学院,南京211100)
光伏电池的输出特性[1]受外界环境的影响较大,效率较低。研究太阳能电池的模型及其最大功率点跟踪策略MPPT(maxiumum power point tracking),对于光伏电池转换效率[2]的提高有着重要的意义。针对MPPT 的问题,学者们提出了很多MPPT 算法。其中比较原始的是恒定电压和恒定电流法,这两种算法虽实现最简单,但控制性能最差;基于模糊控制和神经网络的智能控制算法应用也比较多,但是实现起来较为复杂,需要占用控制器的大量资源,降低控制器运行速度,控制成本高;近年来,国内外学者开始研究采用粒子群算法进行最大功率点跟踪[3~4],虽然这种算法能有效运用于分布式的光伏发电以及复杂的多峰情况,但对于单个的光伏组件,其要求建模的精度较高,并且在外界环境变化的时候需要重启算法。至于工程上应用较多的功率扰动法P&O(perturbation and observation methold)与电导增量法[5],因其算法性价比高而备受青睐,而这两种算法同时存在跟踪速度与跟踪精度不能很好兼顾的问题。一些学者也试着使用最优梯度法或自适应变步长法[6~7]在线实时调整跟踪步长,能够兼顾到速度与精度的要求,但是存在步长因子难以选择最优的问题,并且要求采样器有足够高的精度,有时会由于电力电子器件的纹波导致得到的步长很大,以致算法无法跟踪到最大功率点,在工程上较难实现。
在权衡控制性能和经济成本的基础上,本文参考了文献[8]的自适应占空比扰动法,此方法采用了两级步长跟踪,虽兼顾了跟踪速度和精度,但是从动态跟踪到稳态运行不能较平滑地过渡,在接近稳态运行点时存在较大振荡,而且在稳态运行时虽然使用较小的步长,但输出的功率仍然存在波动。本文在此基础上,增加了步长的级数,使系统跟踪到最大功率点附近时振荡减小,跟踪过程变得更为平稳;在跟踪到较高的精度时设定零步长扰动,保证系统在稳态运行时无振荡,并且此方法针对提出的控制性能(速度和精度)要求,确保了一定的跟踪裕量,包括速度裕量和精度裕量,以保证跟踪的可靠性。
1 光伏电池特性与建模仿真
1.1 光伏电池特性
光伏电池原理[9~10]如图1 所示,因并联电阻Rsh很大、串联电阻Rs很小,其近似等效伏安特性方程为

式中:Iph为光电流;Id为暗电流;Io为反向饱和电流;q 为电子电荷,1.6×1019C;K 为玻尔兹曼常数,1.38×10-23J/K;n 为二极管因子;T 为摄氏温度。

图1 光伏电池原理Fig.1 Schematic diagram of PV cell
1.2 光伏电池的数学建模与特性曲线
光伏电池在标准条件下测试得到的4 个重要技术参数为:短路电流Isc、开路电压Voc、最大功率点电流Im和最大功率点电压Vm。为了便于建立工程用的模型(误差6%以内[11]),令Isc≈Iph,得到简化的伏安特性方程[12],即

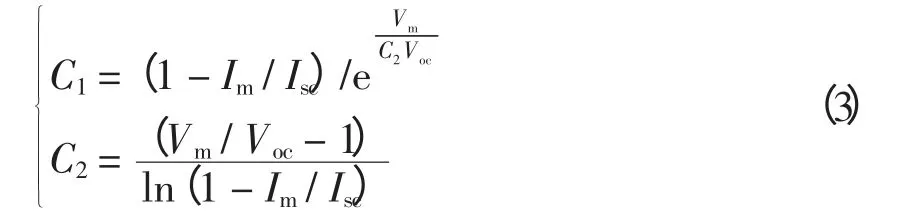
其中:

则C1、C2的表达式[10]为
文献[11]的第1 种方法建立的光伏电池数学模型,只能通过给定标准测试条件的(U,I)点修正得到在新的日照和温度下的(Unew,Inew)点,不便于用来做最大功率点跟踪的仿真。而文献[11]的第2种方法是根据标准测试条件下的Isc、Voc、Im、Vm,推算出新的条件下的Isc_new、Voc_new、Im_new、Vm_new,再代入式(3)得出C1、C2,最后代入式(1)得出伏安特性方程,极大地方便了最大功率点跟踪的仿真。
140 W 光伏电池模块的技术参数见表1。采用文献[11]第2 种方法仿真得到不同光照下的I-U曲线、P-U 曲线,分别如图2、图3 所示。

表1 140 W 光伏电池的技术参数Tab.1 Technical parameters of 140 W PV cell
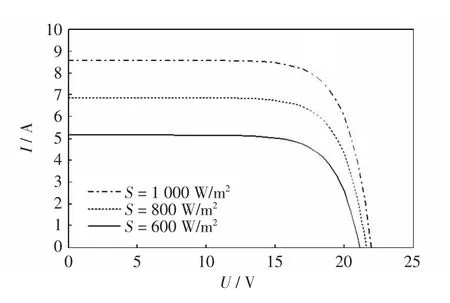
图2 不同光照下的I-U 曲线Fig.2 I-U curves under different illumination
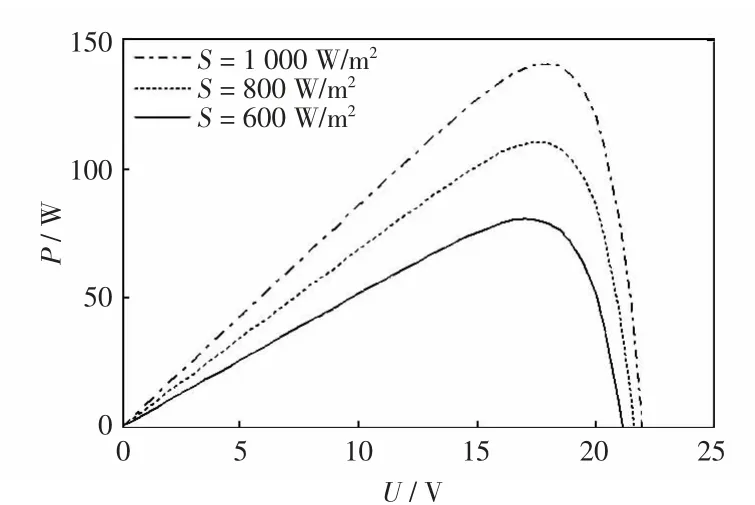
图3 不同光照下的P-U 曲线Fig.3 P-U curves under different illumination
2 MPPT 算法的改进
2.1 MPPT
从以上仿真结果可以看出,光伏电池的伏安特性本身具有非线性,且其伏安特性受外界环境的影响很大,所以光伏电池是一个很不稳定的非线性电源。MPPT 控制是一个自寻优的过程,即通过控制光伏电池的端电压来使光伏电池在环境(日照、温度)变化时,智能化地输出最大功率[13]。一般在负载与光伏电池之间增加一个DC/DC 变换器,通过采用这些算法来改变变换器的导通率,使光伏电池工作在最大功率点。
2.2 MPPT 的系统结构
MPPT 的系统结构如图4 所示,系统由主电路与Boost 控制部分构成。主电路部分由光伏电池、Boost 电路以及负载这3 部分组成;Boost 控制部分是通过调节占空比来控制PWM 电路的输出脉冲,用脉冲控制Boost 电路中的开关,从而调节光伏电池的输出电压U,实现MPPT 的功能。

图4 最大功率点跟踪系统结构Fig.4 Structure of MPPT system
2.3 固定步长占空比扰动法
本文采用将占空比D 作为控制参数即占空比扰动法[14],最终达到阻抗匹配[8],实现MPPT。占空比扰动法本质上与功率扰动法P&O 没有区别,其算法流程如图5 所示。
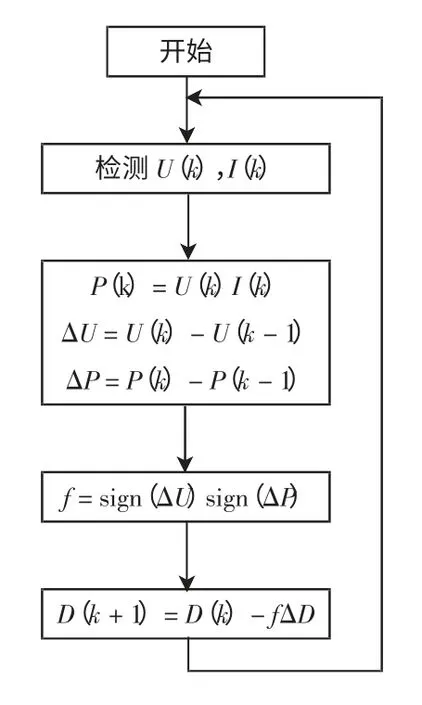
图5 固定步长扰动观察法流程Fig.5 Flow chart of fixed step-size P&O method
对表1 的太阳能电池参数(负载电阻R=20 Ω)进行最大功率点跟踪仿真。当光照度S 为1 kW/m2、太阳能电池的温度T 为25 ℃时,选取步长ΔD=0.000 01,得到MPPT 的仿真曲线如图6(a)所示。此时虽然能够精确地跟踪最大功率点,但跟踪速度相对较慢。
在同样条件下,选取固定步长ΔD=0.000 1,得到的最大功率跟踪的仿真曲线如图6(b)所示。此时跟踪速度虽然大大提高,但在到达最大功率点附近后,输出功率存在较大的振荡,造成很多的能量损失。从以上2 种仿真结果可以看出,固定步长法不能兼顾到系统最大功率跟踪的速度和精度。
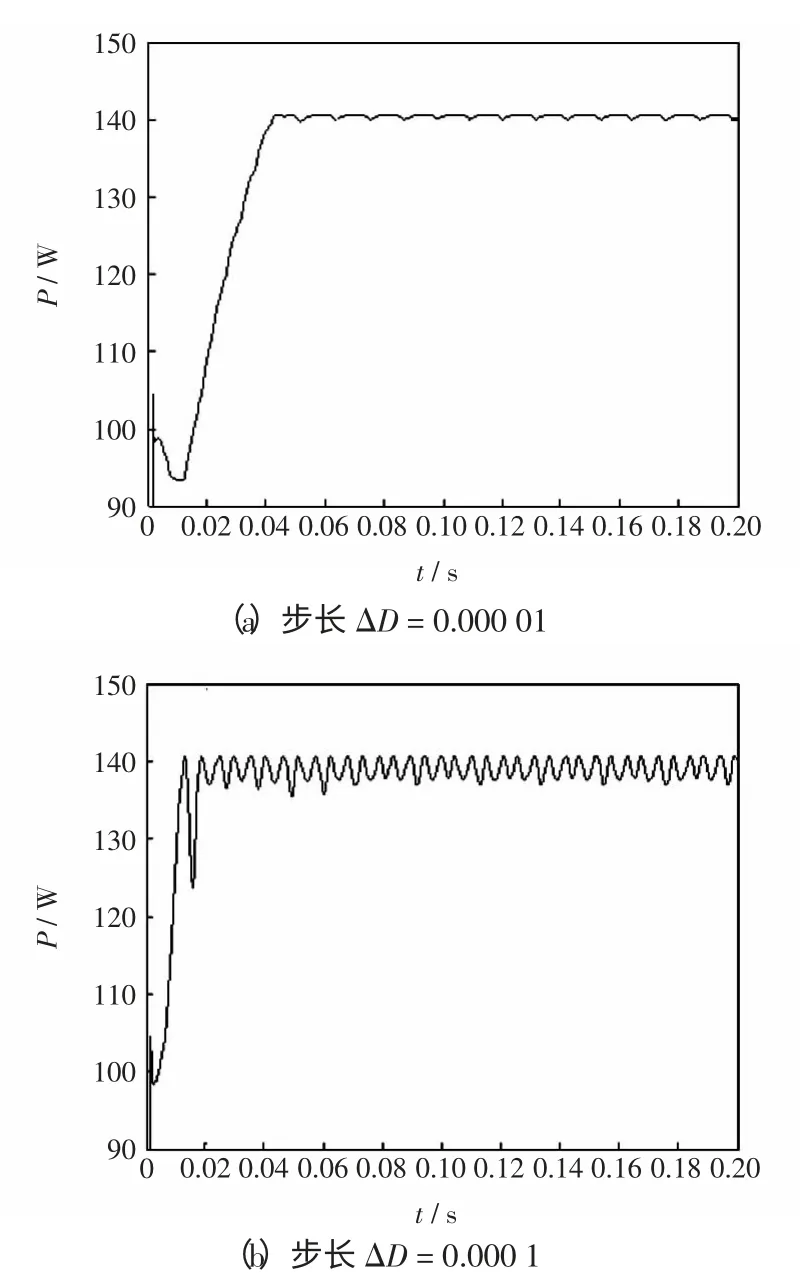
图6 固定步长的MPPT 仿真Fig.6 MPPT simulation with fixed step-size
2.4 二级步长占空比扰动法
在实际工程中,一般对控制精度与控制速度都有相应的要求,若要求控制精度达到图6(a)的要求,控制精度达到图6(b)的要求,此时若采用固定步长的占空比扰动法则不能同时满足要求。
文献[8]针对这个问题使用这2 个步长进行跟踪的方法,也就是两级步长跟踪方法。在离最大功率点较远处采取用大步长,即采用图6(b)的跟踪步长跟踪到最大功率点附近,以加快跟踪速度;然后在离最大功率点较近处,采用小步长,即采用图6(a)的步长扰动,使系统稳定运行在最大功率点附近,并且系统以较小的振幅振荡运行。在与固定步长同样的仿真条件下,采取两级步长得到仿真结果如图7 所示。
由仿真结果可知:这种方法虽兼顾了跟踪速度与精度,但是从动态快速跟踪到稳态运行,不能较平滑地过渡,在这个过渡期会有较大的振荡,且稳定运行时输出功率仍然存在振荡问题。
2.5 多级步长占空比扰动法
针对两级步长的跟踪问题本文设计了多级步长的跟踪策略,如图8 所示,且设定了稳定运行时停止扰动的策略,以保证系统较为平滑地过渡,且使稳定运行时功率输出无振荡。
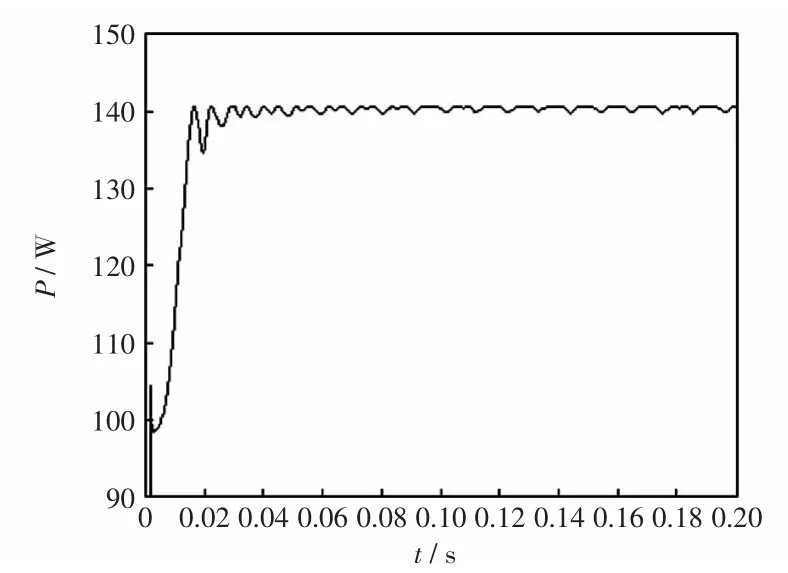
图7 两级步长MPPT 仿真Fig.7 MPPT simulation with two step-sizes
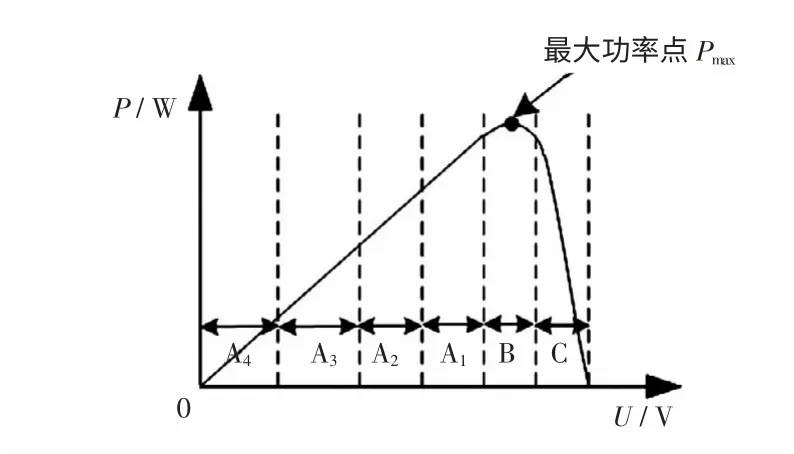
图8 多级步长的原理示意Fig.8 Schematic diagram of multiple step-sizes
为了使系统过渡平稳,减小跟踪过程中的振荡,在原有步长为0.000 01 和0.000 1 两个数量级的基础上增加了2 个数量级,分别为0.000 001 和0.001。为了使系统稳定运行时无振荡,在此基础上又增加了零扰动步长的设定。
步长ΔD 随ξ 的变化而有级地进行变化,ξ 的表达式为

步长ΔD 的取值如表2 所示。
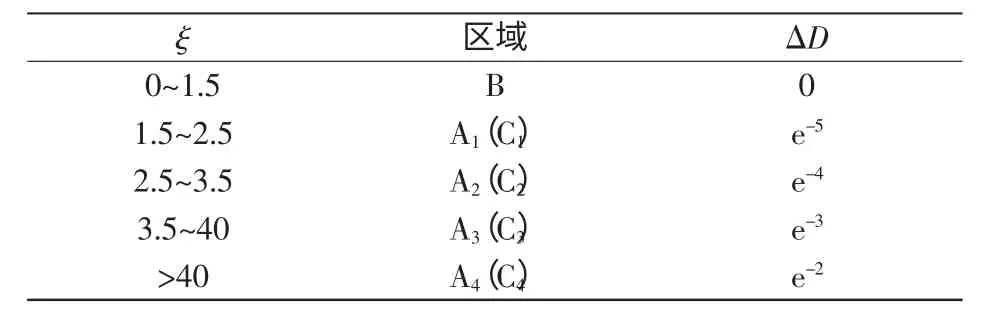
表2 ΔD 取值Tab.2 Value of ΔD
在与两级步长法同样的仿真条件下,采取多级步长法得到的仿真结果如图9 所示。与两级步长法所得到的仿真结果比较可以看出,在一定的光照和温度下,本文改进的多级步长法不仅能平稳地跟踪到最大功率点,稳定运行时输出功率恒定,不存在振荡的情况,而且比原先的跟踪速度更快,稳态逼近精度更高。在外界光照条件发生改变(800→600→1 000)的情况下,得到如图10 所示的多级步长MPPT 仿真曲线。可见在光照强度发生变化时,此算法仍然能够快速且准确地实现最大功率点跟踪。
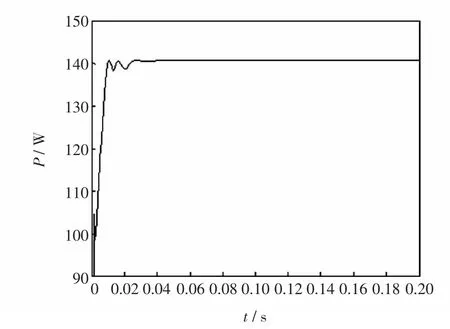
图9 多级步长MPPT 仿真Fig.9 MPPT simulation with multiple step-size

图10 照度变化时多级步长MPPT 仿真Fig.10 MPPT simulation with multiple step-size under changing illumination
3 结论
本文通过对光伏电池原理的分析建模,仿真研究了不同照度下光伏电池的特性。对固定步长的占空比扰动法进行了仿真,并针对固定步长法不能同时兼顾跟踪速度与精度的问题,参照文献[8]的两级步长最大功率点跟踪方法进行改进,提出了一种实现方便的多级步长控制策略。仿真结果表明该控制策略不仅能同时满足了跟踪速度和精度的要求,在环境快速变化的情况下能快速、准确地跟踪到最大功率点,而且还有3 点改进:
(1)从快速跟踪到稳定运行的控制过程变得更为平稳,跟踪过程中振荡减小;
(2)跟踪精度有所提高,并且在稳定运行时系统功率输出无振荡;
(3)能针对相应提出的控制性能要求,确保一定的跟踪裕量,包括速度裕量和精度裕量,更容易满足工程中跟踪可靠性的要求。
[1]赵福鑫,魏彦章.太阳电池及其应用[M].北京:国防工业出版社,1985.
[2]OMANH. Space solar power development [J]. IEEEAES Systems Magazine,2000,15(2):3-8.
[3]朱艳伟,石新春,但扬清,等(Zhu Yanwei,Shi Xinchun,Dan Yangqing,et al). 粒子群优化算法在光伏阵列多峰最大功率点跟踪中的应用(Application of PSO algorithm in global MPPT for PV array)[J]. 中国电机工程学报(Proceedings of the CSEE),2012,32(4):42-48,S6.
[4]Kamejima T,Phimmasone V,Kondo Y,et al. The optimization of control parameters of PSO based MPPT for photovoltaics[C]//IEEE Ninth International Conference on Power Electronics and Drive Systems.Singapore:2011.
[5]王长贵,王斯成.太阳能光伏发电实用技术[M].北京:化学工业出版社,2005.
[6]黄舒予,牟龙华,石林(Huang Shuyu,Mu Longhua,Shi Lin).自适应变步长MPPT 算法(Adaptive variable step size MPPT algorithm)[J]. 电力系统及其自动化学报(Proceedings of the CSU-EPSA),2011,23(5):26-30.
[7]王厦楠(Wang Xianan).独立光伏发电系统及其MPPT的研究(The Research of the Stand-Alone Photovoltaic System and It’s Maximum Power Point Tracking)[D]. 南京:南京航空航天大学民航学院(Nanjing:College of Civil Aviation,Nanjing University of Aeronautics and Astronautics),2008.
[8]曹金虎,薛士龙,陈意惠,等(Cao Jinhu,Xue Shilong,Chen Yihui,et al).基于自适应占空比扰动的MPPT 算法研究(MPPT algorithm research on the basis of selfadaptive duty cycle disturbance)[J].佳木斯大学学报(自然科学版)(Journal of Jiamusi University(Natural Science Edition)),2011,29(1):76-79,85.
[9]冯垛生,宋金莲,赵慧,等.太阳能发电原理与应用[M].北京:人民邮电出版社,2007.
[10]王长江(Wang Changjiang).基于MATLAB 的光伏电池通用数学模型(Versatile model for photovoltaic cell based on MATLAB)[J].电力科学与工程(Electric Power Science and Engineering),2009,25(4):11-14.
[11]苏建徽,余世杰,赵为,等(Su Jianhui,Yu Shijie,Zhao Wei,et al).硅太阳电池工程用数学模型(Investigation on engineering analytical model of silicon solar cells)[J].太阳能学报(Acta Energiae Solaris Sinica),2001,22(4):409-412.
[12]赵争鸣.太阳能光伏发电及其应用[M].北京:科学出版社,2005.
[13]赵为(Zhao Wei). 太阳能光伏并网发电系统的研究(Research on Grid-Connected Photovoltaic System)[D].合肥:合肥工业大学电气与自动化工程学院(Hefei:School of Electrical Engineering and Automation,Hefei University of Technology),2003.
[14]杨文杰(Yang Wenjie).光伏发电并网与微网运行控制仿真研究(Simulation and Research of Grid Connected Photovoltaic Generation and Microgrid Operation Control)[D].成都:西南交通大学电气工程学院(Chengdu:College of Electrical Engineering,Southwest Jiaotong University),2010.
猜你喜欢
数学物理学报(2022年4期)2022-08-22
大电机技术(2022年3期)2022-08-06
核科学与工程(2021年4期)2022-01-12
成都信息工程大学学报(2021年5期)2021-12-30
煤气与热力(2021年4期)2021-06-09
中华戏曲(2020年1期)2020-02-12
数学物理学报(2019年4期)2019-10-10
贵州师范学院学报(2016年3期)2016-12-01
电源技术(2015年11期)2015-08-22
河北科技大学学报(2015年5期)2015-03-11