
MITS中智能数据处理与应用关键技术研究
2014-03-01 02:53:37陆百川支鹏飞张新雨
重庆交通大学学报(自然科学版) 2014年3期
李 政,陆百川,支鹏飞,张新雨
(1.甘肃省交通科学研究院有限公司,甘肃 兰州 730050;2.重庆交通大学 交通运输学院,重庆 400074)
0 引 言
随着全球经济的发展和贸易的繁荣,航运业也取得了迅速发展,船舶的数量和吨位与日俱增。使得航道变得越来越繁忙,尤其在狭窄航道以及恶劣天气的条件下,更容易发生船舶碰撞和其他各类交通事故。如何既能够有效提高运输效率,又能保障航运安全是航运业目前亟待解决的主要问题之一。
近年来,ITS已在城市智能化交通管理和控制、高速公路监控系统、收费系统、交通安全保障系统等得到广泛应用,也是各先进国家发展未来运输方式的研究前沿。ITS在道路运输系统中的成功运用,为航运业的发展提供了一种新的探索方向,借鉴其中的一些先进的理念和技术,结合航运体系的特点,产生了航运智能运输系统(MITS)的概念,这种系统是更加安全、可靠、有效运行和管理的新一代航运系统。同ITS一样,航运智能运输系统也是一个大范围、多层次、多变量、结构复杂、功能综合的综合系统,主要包括船舶监控系统、船舶管理系统、自动导航系统、自动避碰系统、突发事件应对系统及交通信息网上发布、全球定位系统和海事通信卫星、雷达自动标绘系统、电子海图显示与信息系统等[1]。笔者重点从理论上对MITS中智能数据的处理与应用进行究。
1 MITS系统框架体系研究
MITS与道路智能交通系统一样,是一个相当复杂的系统,系统的总体结构如图1。主要包括:集成管理、集成数据库、综合应用系统、设备接入和其它系统。
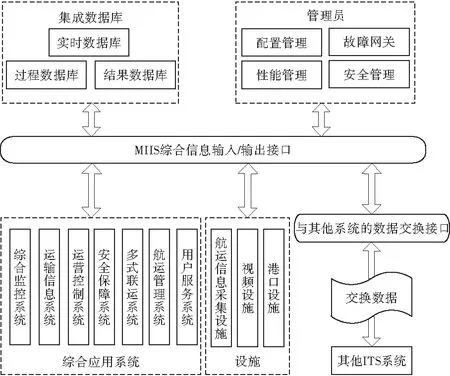
图1 航运智能交通系统总体结构Fig.1 Structure of shipping intelligent transportation system
2 MITS数据处理内容及流程
2.1 数据处理内容
MITS的实施,离不开传感器的应用,但是在多传感器系统的应用当中,由于传感器系统自身特性以及外界环境的影响,检测到的目标船舶航迹数据往往含有大量的噪声,所以数据预处理是数据融合的必要条件。在数据融合之前必须对采集到的原始数据进行降噪处理,其主要目的就是消除多传感器系统噪声、以及一些暗礁、岛屿、水鸟、水浪等非目标干扰所产生的杂波点,对降噪以后的数据进行航迹跟踪,同时对各类传感器数据进行时空配准,在时间上和空间上实现异类传感器数据的统一,最后确定属于同一目标相关联的航迹,为数据融合环节提供较为正确的数据源,进而保证后续航迹跟踪和预测的准确性。
具体内容包括多源多传感器船舶定位信息及其实时动态监测、航迹信息预处理、航迹融合、航迹跟踪、预测以及船舶信息GIS显示和发布几方面内容。
2.2 数据处理流程
MITS智能数据处理基本工作流程如图2,主要包括数据采集模块、通信网络模块、中心数据库模块、模型算法与数据处理模块和输出模块。

图2 MITS智能数据处理流程Fig.2 MITS intelligent data processing
3 MITS数据处理方法及实验仿真分析
3.1 数据处理方法
利用各种检测器得到的各类航运数据通过通信网络传到了中心数据库模块,其由初始数据库、过程数据库和结果数据库组成。模型算法与数据处理模块由数据预处理、空间配准、时间配准、航迹关联、航迹融合、航迹预测等多种模型组成。利用数据融合、数据挖掘、小波多尺度分解与重构、神经网络、Kalman滤波以及遗传算法等技术对数据库的数据分别进行分析和计算,最后将得到的结果通过数据、图形、声音图像等多种方式输出[2-3]。
3.2 实验仿真及分析
根据船舶运输、海事、海域以及水上交通的特性和以上各章节的理论和方法,该系对船舶运输的交通数据(经度为例)进行处理,包括采集原始数据的消噪处理、航迹跟踪、数据的时空对准、航迹关联、数据融合和航迹预测几个模块,最后对得到的处理结果进行统计和分析,做出合理的预测。
原始数据的消噪处理采用小波多尺度分解与重构的方法,通过设置3尺度和5尺度的小波消噪可以很好的保持原始信号的瞬变特征,突出了与传统数据消噪方法的明显优势[4],结果如图3。



图3 基于小波的原始数据(经度)降噪Fig.3 Raw data (longitude) noise reduction based on wavelet
数据预处理之后,根据船舶行驶速度和轨迹的相关性,采用逻辑法实现多目标航迹之间的区分和跟踪[5],如图4。
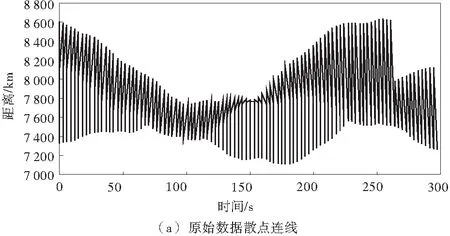

图4 多目标航迹跟踪Fig.4 Multi-target tracking track
针对异类传感器采集数据的不同步,笔者做了基于BP神经网络、RBF神经神经网络和3次样条插值的时间对准。RBF神经网络多传感器时间对准结果误差最小[6],图5为经度数据的时间对准效果图,利用该方法进一步做了纬度数据、经向速度和纬向速度的时间对准。

图5 AIS时间对准与RBF插值时间对准比较(经度)
多传感器数据时空对准以后,通过误差相似性的判断确定不同传感器监测到的同一目标航迹[7]。通过采用粒子群优化算法(PSO)是同一目标航迹的融合,其仿真结果和融合误差比较如图6,可以很好的反应出船舶行驶的真实航迹[8]。
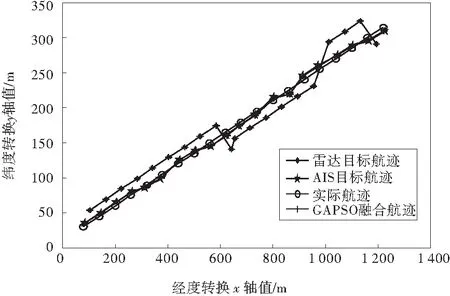
图6 GAPSO航迹融合比较分析Fig.6 GAPSO track fusion
以上数据处理的结果可为监测者提供较准确的航迹信息,同时监测者可以依据掌握的有效数据对船舶的未来航迹进行预测,确保船舶行驶的安全性。笔者采用遗传算法结合神经网络的方法实现船舶航迹的预测,并与真实的航迹信息进行比较,结果如图7,误差满足要求[9]。

图7 航迹预测Fig.7 Track prediction
数据处理结束后,如何将有效的信息发布以为更多的用户服务显得尤为重要。文中交通信息的显示和发布模块是调用MATLAB自带的map工具箱来实现的。在一定的交通条件下,可以手动的获取各个船舶航迹及其事故地点的相关信息,如图8。

图8 船舶航迹GIS地图信息Fig.8 GIS map information dispiay of shipping track
为了更好的发布数据处理的结果以及获得在不同环境下船舶的位置和事故信息,可以通过自己手动来选择船舶的行驶环境和船舶的行驶路线,以此更好的来实现对船舶行驶的跟踪和监控,经过GIS地图显示控制界面的切换,可实现另一种船舶行驶环境下的监控和显示,如图9。

图9 航迹GIS地图信息显示界面Fig.9 GIS map information dispiay interface of shipping track
为了实现事故地点的GIS地图匹配,用函数shaperead来调用map工具箱里面的shp文件,分别有landareas.shp,worldlakes.shp和worldcities.shp等其他GIS空间信息,并实现各个shp文件之间的相互嵌套。用函数geoshow和textm来实现事故地点的显示,调用自己编写的函数qrydata来实现事故地点及周边救援设施信息的获取[10]。也可以根据交通事故地点所处的经纬度在GIS地图上实现显示。事故地点经纬度、周边城市和救援系统名称获取,即通过鼠标的点击即可获得此点所在位置的经纬度和与此点距离最近的城市。实施效果如图10。

图10 航迹GIS信息显示Fig.10 GIS information dispiay of track
4 结 语
通过基于信息融合与数据挖掘的智能信息处理技术在内河航运管理系统的应用,实现航运各子系统之间信息共享,提高内河航运管理和安全水平、减少阻塞、增加交通的机动性、减少船舶运输对环境的影响、提高航道通行能力和交通效率,进而能够使各个管理部门和职能部门(公安、消防等)实现信息共享,方便沟通和交流,对其决策过程能够有所帮助。在实际的应用中如何提高各种算法的鲁棒性和有效性以及软件运行的稳定性是今后需要进一步研究的内容。
[1] 李政,陆百川.船舶智能运输管理系统的设计与开发[J].中国智能交通,2010(4):74-77.
Li Zheng,Lu Baichuan.The design and development on ship intelligent transportation management system [J].China Intelligent Transportation, 2010(4): 74-77.
[2] 张德丰.MATLAB神经网络应用设计[M].北京:机械工业出版社, 2009:20-53.
Zhang Defeng.MATLAB Neural Network Application Design [M].Beijing: China Machine Press, 2009: 20-53.
[3] 黄友锐.智能优化算法及其应用[M].北京:国防工业出版社,2008:1-32.
Huang Yourui.Intelligent Optimization Algorithm Application [M].Beijing: National Defense Industry Press, 2008: 1-32.
[4] 李政,陆百川,谭伟,等.基于小波和逻辑法的多目标跟踪数据预处理[J].重庆交通大学学报:自然科学版,2011,30(1):171-175.
Li Zheng,Lu Baichuan,Tan Wei,et al.Multi-target tracking data preprocessing based on wavelet and logic method[J].Journal of Chongqing Jiaotong University: Natural Science, 2011, 30(1):171-175.
[5] Lu Baichuan,Li Zheng. Application of wavelet,logic and neural network in multi-target tracking data processing[C]//Proceedings of the 2011 TMEE International Conference on Transportation and Mechanical & Electrical Engineering. Changchun,China: Jilin University, 2011: 2544-2547.
[6] 许晓剑,田康生,范锦勇,等.基于极大似然估计的最优航迹关联算法[J].空军雷达学院学报,2010,24(1):22-24.
Xu Xiaojian,Tian Kangsheng,Fan Jinyong,et al.Algorithm of optimal track association based on maximum likelihood estimation [J].Journal of Air Force Radar Academy, 2010, 24(1): 22-24.
[7] 谭伟,陆百川,李政,等.基于遗传粒子群算法的船舶航迹融合研究[J].重庆交通大学学报:自然科学版,2010,29(5):828-831.
Tan Wei,Lu Baichuan,Li Zheng,et al.Track fusion based on particle swarm optimization algorithm with genetic operator[J].Journal of Chongqing Jiaotong University:Natural Science, 2010, 29(5): 828-831.
[8] 雷秀娟,史忠科,孙瑰琪.基于遗传算子的粒子群优化算法的比较分析[J].计算机工程与应用,2008,44(14):65-66.
Lei Xiujuan,Shi Zhongke,Sun Guiqi.Comparison and analysis of particle swarm optimization method based on genetic operator [J].Computer Engineering and Applications, 2008, 44(14) : 65-66.
[9] 飞思科技产品研发中心.MATLAB 6.5辅助小波分析与应用[M].北京:电子工业出版社,2003:1-85.
Feisi Technology R & D Center.MATLAB 6.5 Auxiliary Wavelet Analysis and Application [M].Beijing: Publishing House of Electronic Industry, 2003: 1-85.
猜你喜欢
心理学报(2022年4期)2022-04-12 07:38:02
船舶(2021年4期)2021-09-07 17:32:22
水泵技术(2021年3期)2021-08-14 02:09:20
小哥白尼(趣味科学)(2019年10期)2020-01-18 09:16:22
青年歌声(2019年12期)2019-12-17 06:32:32
船舶标准化工程师(2019年4期)2019-07-24 07:21:12
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
中国船检(2017年3期)2017-05-18 11:33:09
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
中国惯性技术学报(2015年1期)2015-12-19 13:12:17
