
基于图像处理的桥梁缆索检测系统研制
2014-02-28 04:30刘朝涛杜子学向中富
重庆交通大学学报(自然科学版) 2014年2期
刘朝涛,杜子学,武 维,向中富
(1.重庆交通大学 机电与汽车工程学院,重庆 400074;2.重庆交通大学 土木建筑学院,重庆 400074)
0 引 言
缆索是斜拉桥的主要承重部分,大型斜拉桥缆索存在安装后难以进行健康检测和维护的问题。缆索的检测和维护最关键的技术包括两部分:①研究拖带检测仪器在缆索上运动的缆索爬行机器人;②研究缆索的自动检测技术和仪器。
开发能自动沿缆索爬升并携带检测装置完成一定作业任务的爬缆装置,首先可以解决缆索的在役检测问题,而且还可以给缆索的维护作业提供一种手段。目前,张家梁,等[1]研制了采用电驱动式、气动蠕动式两种缆索机器人样机。赵淑娟,等[2]研制了采用了多电机驱动的爬缆机器人。
缆索的自动检测技术和仪器,目前在国内外有不少的研究,如振动法、超声波探伤、磁漏检测法、电涡流法[3-6]等都可以用于桥梁的缆索的检测。但这些检测方法目前更多地处于理论研究和探索阶段,在实用性方面还存在一定的局限性,难以在桥梁缆索检测中得到广泛实用,尤其是难以做到在役检测。
缆索常见的病害主要有3种[7]:①拉索护套病害,包括护套的开裂、凹坑、开裂等;②当护套病害严重,甚至露丝时,就会发生拉索钢丝病害,包括钢丝镀锌氧化、钢丝锈蚀、钢丝锈断等;③斜拉索锚具的锈蚀。拉索护套病害、斜拉索锚具的锈蚀能从缆索的外观上判断,缆索内部的拉索钢丝病害通常与护套开裂有关,因此,通过对缆索外观的观察,基本上能检测出大多数的缆索病害[8]。对缆索进行全方位照相,并经图像处理和识别后再由专业人员人工检查缆索图像,相当于桥梁专家对缆索外观的全方位检查,对桥梁缆索病害的诊断和维护应该是有效实用的方法。
笔者研制了一种采用单电机驱动的缆索检测机器人,它能沿缆索自行爬升,并能适应不同直径的缆索。机器人携带了3台微型相机,可以对缆索进行全方位照相,并通过对缆索图像进行自动识别,初步判断缆索的病害,再由人工进一步确认缆索的病害。文章对缆索图像特征进行了分析,找出病害缆索图像的特征,研究了缆索病害图像的分析和判断方法。
1 缆索检测系统的研制
缆索检测系统包括一套缆索检测机器人(含控制及照相系统)、位于地面的上位计算机。检测机器人和上位计算机之间通过无线通讯,实现对机器人的控制以及检测结果的上传。
1.1 基于图像的缆索健康检测方案
笔者将微型数码相机装在机器人上,对缆索的各个部位进行拍照,再对所拍摄的缆索图像进行分析来判断和识别缆索的病害。
要检查一根缆索的每个部位的外观,最少必须有3个镜头同时对缆索照相,如图1。经计算,当3个镜头成等边三角形分布、且距缆索中心至少2倍半径时,能实现对缆索整个圆柱面的检查。
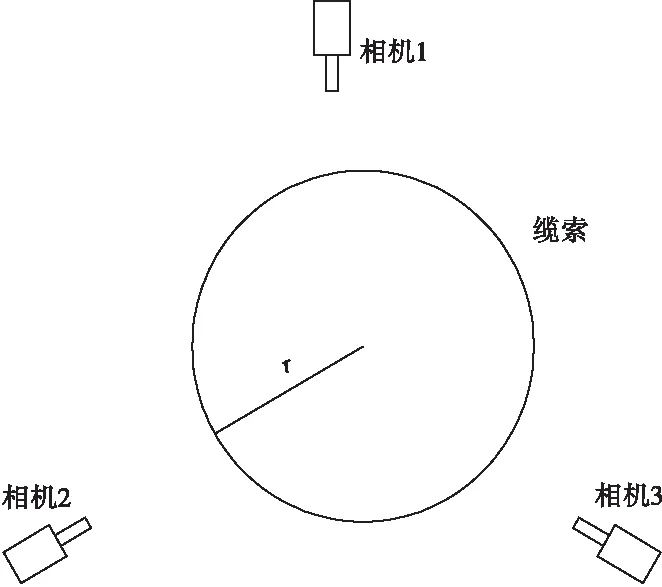
图1 相机布局Fig.1 Layout of cameras
机器人每行进一段位移,3个照相机同时对缆索进行一次照相,并将图像存储。位移的大小取决于照相机拍照时在缆索所在平面的视域大小,必须保证相邻两次拍摄到的图像有部分重叠。
1.2 缆索检测机器人组成
缆索检测机器人从整体上包括爬行机构、控制系统、照相系统、电机等几个部分,其在缆索上的安装如图2。爬行机构由单电机驱动,是机器人的运动系统,其任务是带动整个机构按设定的任务自主地在缆索上上下运动。控制系统是整个系统的中枢,它要完成同地面操作人员的通讯、采集检测装置的检测结果、控制并驱动爬行机构按照要求运动。缆索检测机器人可以在倾斜度0~90°,直径为90~200 mm,直径变化量在20 mm以内的缆索上爬升,爬升速度为1~10 m/s,并可以自主判断是否到顶,并实施相应的动作。
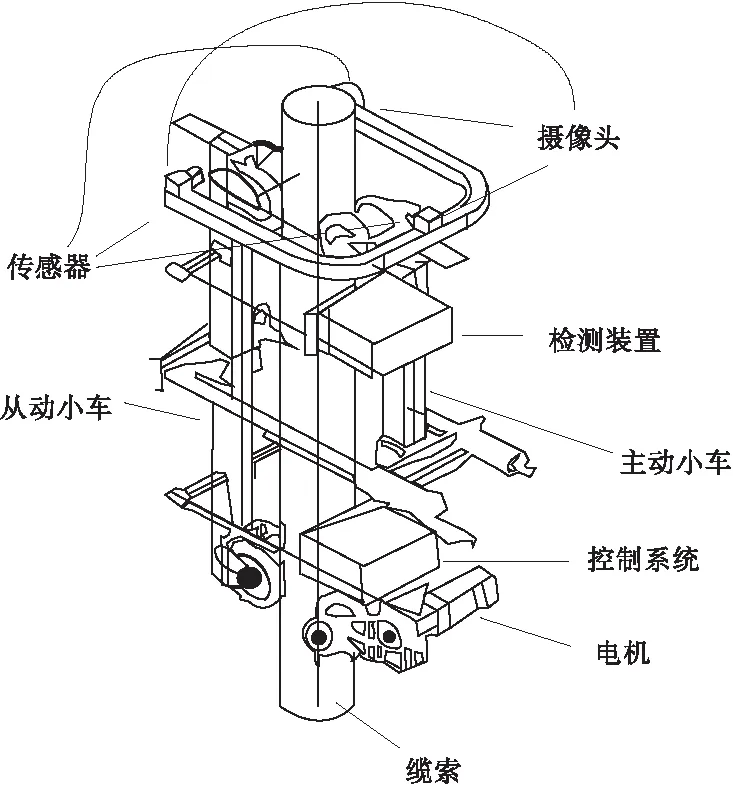
图2 检测机器人组成示意Fig.2 Composition of the cable inspection robot
机器人可以拖带检测装置,如电涡流检测装置、磁漏检测装置、超声波检测装置等,以检测桥梁缆索外表及内部是否有损伤。检测的结果由控制和监视系统负责采集并存储。机器人还可以拖带简单维护设备,对缆索进行维护。
1.3 爬行机构组成和工作原理
爬行机构解决整个机器人在缆索上克服重力作用向上和向下运动。作者设计了如图3所示的机构,采用弹簧将机构压紧在缆索上,利用摩擦力和电机的驱动力来克服重力的作用,使整个机器人能在控制系统的控制下运动。

图3 轮式爬行机构Fig.3 Composition of the crawling machine
爬行机构由两辆轮式爬行小车和连接装置组成,小车包括主动小车和从动小车,主动小车和从动小车通过连接装置连接,连接装置为系统提供了连接、导向和车轮提供驱动所需的正压力。连接装置采用双螺旋弹簧提供预紧正压力,并通过轮与桥梁缆索之间的摩擦力转化为系统的驱动力。主动小车由电机经减速器、传动机构带动前后驱轮驱动主动小车运动,并通过连接装置、导向装置牵引从动小车运动。主动和从动小车的行走机构均采用平衡悬架行走机构,平衡悬架可实现轮式爬行机构的驱动轮和从动轮与不平的桥梁缆索外表面良好的接触,为系统的爬行运动提供足够的驱动附着力,并保障机器人能通过直径较大变化(20 mm以内)的缆索。而弹簧预紧系统还能够提供系统爬升所需的法向载荷,满足桥梁缆索检测机器人上下行的需要。
1.4 机器人样机实验
实验选择在重庆李家沱长江大桥上进行。实验中的机器人如图4。缆索的参数为:底部直径Φ120 mm,顶端直径Φ100 mm,缆索长度140 m。

图4 重庆李家沱长江大桥上正在实验的机器人Fig.4 The robot on the Chongqing Lijiatuo Changjiang Bridge
2 缆索图像分析及病害识别
通过对采集的图像进行分析和识别,可以减少人工分析图像的工作量和上下位机之间的数据传送量。经过对缆索图像的观察分析,特别是对正常图像与病害缆索图像的对比,发现有病害的缆索图像病害区域颜色变化较大,颜色深浅不一,形状复杂多变,因此可以通过图像纹理来识别图像是否有病害。
笔者首先用MATLAB对图像进行仿真分析[9],研究出处理的步骤和方法后,然后再转化成VC程序,并集成在图像采集系统的软件中。图像分析的步骤为:图像去噪、图像增强、图像分割、纹理特征提取、图像识别。
2.1 缆索图像去噪处理
系统所采集的图像常伴有大量的闪烁亮点噪声[9-10]。噪声主要有两类:一类是高斯噪声,在图像上表现为细小、微弱的颗粒性亮点;另一类是脉冲噪声,在图像上的表现为较大的、明亮的随机性亮点。它们主要由光电转换器件、图像采集器件CCD和桥梁检测中的高空、水雾、较低照度环境所造成。针对噪声特点,首先采用中值滤波算法去掉图像中脉冲噪声,然后采用小波去噪去除图像的高斯噪声。
中值滤波的基本原理是把数字图像或数字序列中一点的值用该点的一个领域中各点值的中值代替,从而消除孤立的噪声点。方法是采用二维滑动模板,将板内像素按照像素值的大小进行排序,生成单调上升(或下降)的二维数据序列。二维中值滤波输出为:
g(x,y)=mid[f(x-i,y-k)](i,k∈w)
(1)
式中:f(x,y),g(x,y)分别为原始图像和处理后图像;w为二维模板,通常为2×2,3×3区域。
小波去噪方法的原理是,将原始图像在水平、垂直和对角线方向进行小波分解,将图像分解为1个低频图像和3个高频图像。这3个高频图像分别代表水平方向、垂直方向和对角线方向的边缘信息。对分解后的低频图像进行去噪,而3个高频图像保持不变,再把几个图像叠加,就可以在滤波噪声的同时保持边缘信息。
小波去噪常用的图像消噪方法是小波阈值消噪方法,对小波分解后的各层系数模大于和小于某阈值的系数分别进行处理,然后利用处理后的小波系数重构出消噪后的图像。小波阈值消噪方法中阈值的选取是一个非常关键的因素。阈值去噪方法主要有3种,经过试验,给定软阈值方法最好,这种方法采用wdcbm2函数获得降噪阈值,然后再用wdencmp函数来实现图像的降噪。图像处理结果见图5。



图5 缆索图像滤波Fig.5 Image filtering of the cable
2.2 缆索图像增强
图像增强的主要目的是提高图像的视觉质量或者凸显某些特征信息。小波图像增强的步骤为:先将图像进行小波变换,再在频域做增强运算,最后经小波逆变换后得到增强后的图像。小波变换将一幅图像分解为大小、位置和方向均不相同的分量,在作逆变换之前,可根据需要改变不同位置、不同方向上的某些分量系数的大小,从而使得某些感兴趣的分量放大而使某些不需要的分量减小。由于二维小波分解后,图像的轮廓主要体现在低频部分,而细节部分则体现在高频部分,因此,可以通过对低频分解系数进行增强处理,对高频分解系数进行衰减处理,即可以达到图像增强的目的。经过小波图像增强后图像更加清晰,纹理更加明显,图像的对比度得到拉伸,使图像的识别更加容易,见图6。


图6 图像增强和分割Fig.6 Image enhancement and image segmentation of the cable
2.3 缆索图像分割
在对缆索图像的研究和应用中,往往仅对图像中的缆索部分感兴趣。这些部分常称为目标或前景,它们一般对应图像中特定的、具有独特性质的区域。为了辨识和分析缆索部分,需要将它们分离提取出来,在此基础上才有可能对缆索进行下一步的识别。图像分割就是指把图像分成各具特性的区域并提取出感兴趣目标的技术和过程,见图6。
缆索图像分割的方法是:分别采用阈值分割检测图像的左边缘和右边缘。最后把灰度图像中左边缘以左、右边缘以右的像素值赋为255(即为白色),两边缘之间的像素值不变。
阈值分割就是确定一个处于图像灰度取值范围之中的灰度阈值,然后将图像中各个像素的灰度值都与这个阈值相比较,并根据比较结果将对应的像素划分为两类:像素的灰度值大于阈值的为一类,像素的灰度值小于阈值的为另一类(灰度值等于阈值的像素可归入这两类之一)。
2.4 缆索图像的特征和病害识别
病害缆索的图像是指有污迹、破损等现象的图像,它反映了缆索可能受到损害,图7是一幅实拍的缆索病害图像。通过对比正常缆索图像和病害缆索图像,发现正常缆索图像颜色分布较均匀,且缆索前后位置的图像颜色分布变化不大;而病害图像颜色深浅不一,图像本身在病害部位附近颜色变化较大,而且与前后位置的图像在颜色分布上存在较大差异。因此,针对缆索病害的这些特征,可以采用对颜色统计的方法来识别缆索病害。这种识别方法简单,计算量也较小,尤其适合在嵌入式机器人中应用。

图7 缆索病害图像Fig.7 An image of defect cable
图像特征是指图像的原始特性或属性。其中有些是视觉直接感受到的自然特征,如区域的亮度、边缘的轮廓、纹理或色彩等。有些是需要通过变换或测量才能得到的人为特征,如变换频谱、直方图、矩等。纹理特征提取指的是通过一定的图像处理技术抽取出纹理特征,从而获得纹理的定量或定性描述的处理过程。纹理特征提取包括两方面的内容:检测出纹理基元和获得有关纹理基元排列方式的信息。
在对缆索图像病害的识别中,只需要识别出哪张图片所对应的缆索位置上有病害(反映在缆索上的位置精度为cm量级),以便维护和保养,并不需要特别高的位置精度,也不需要识别病害的形状。由于识别的目的是检测出可能是病害的图片,以便人工进行处理,因此识别应该将所有疑似病害的图片识别出来,即使将正常图像误为病害图像也没有关系,还可以进一步由人工处理,但必须保证能完全识别出所有病害的图像。也就是说,缆索识别的要求是可以有误判,但不能漏判。
根据缆索图像病害识别的特点,采用统计纹理特征的方法分析,通过提取图像直方图统计纹理特征参数(如均值、方差、偏度、峰度、能量、熵等),就能识别出一张缆索图片是否病害图片。这样可以用简便而有效的方法实现识别任务,而且计算量较小。
直方图统计纹理特征参数信息提取算法如式(2):
(2)
灰度直方图的均值表示图像的平均灰度,方差表示图像灰度的分散程度,对于等灰度分布直方图,即均衡化直方图,能量最小,熵最大。
由于缆索图像的病害识别的要求是可以有误判,但不能漏判。因此对纹理特征的阈值选取必须保守,必须保证病害图像的识别率为100%。根据上述要求,选择了大量图片分别进行这些特征参数的统计分析,找出病害图像的特征。通过试验,如果两相邻图像的均值差值在0.200以上、方差在5以上、能量差值在0.02就可能存在病害。
以前述识别条件,对所采集的图像进行自动识别,一共识别了49个位置共147张图片,经过人工判定其中17张有一定程度的病害,另外130张图片为正常的图片,实验结果如表1。正常图像识别率有89.23%,其中有14张图片被识别为有病害,误判率10.77%,经过人工分析,发现这些误判图片本身存在一定的色差,或桥梁的某些部分的干扰;而有病害的17张图像则无一遗漏被全部识别出来,病害识别率达到100%,这也正是所需要的。可见,笔者所使用的缆索病害图像识别方法简单而有效。

表1 实验结果
3 结 语
为保证斜拉桥的安全使用,对其缆索进行定期或不定期无损检测是非常重要的。笔者研制了一种斜拉桥的缆索检测机器人,它能沿不同直径的缆索自行爬升,并完成缆索表面和内在质量检测,能广泛应用于斜拉桥及类似建筑中的缆索检测与维护。从样机实验的情况来看,该机器人能在不平的缆索上平稳自如地爬升,检测效率高,效果令人满意。
笔者还研究了缆索图像中病害图像的识别方法和技术,该方法通过对图像的滤波和增强,然后将缆索部分图像分割出来。而识别算法则利用分割后的缆索图像的直方图,通过对直方图的纹理特征识别实现对缆索病害的识别。实验结果表明,虽然有一定的误判,但这种方法能完全准确地识别出所有病害图像,说明这种方法简单而有效。
[1] 张家梁,吕恬生,罗均.大倾斜度缆索机器人的研制[J].高技术通讯,2001,11(1):88-90.
Zhang Jialiang,Lv Tiansheng,Luo Jun.Development of arbitrary gradient cable robot [J].High Technology Letters,2001,11(1):88-90.
[2] 赵淑娟,周忆,王亚斌.斜拉桥缆索检测机器人结构设计与运动仿真[J].现代制造工程,2011(10):75-78.
Zhao Shujuan,Zhou Yi,Wang Yabin.The design and kinematic simulation of the cable-staged bridge inspection robot [J].Modern Manufacturing Engineering,2011(10):75-78.
[3] 杨叔子,康宜华.钢丝绳断丝定量检测原理与技术[M].北京:国防工业出版社,1995.
Yang Shuzi,Kang Yihua.Principle and Technology of Quantitative Detection for Broken Wire in Steel Rope [M].Beijing:National Defense Industry Press,1995.
[4] 刘春.电磁声裂纹检测虚拟仪器系统的研究[J].传感技术学报,2007,20(2):477-480.
Liu Chun.Study on the system based on EMAT and virtual instrument for detecting cracks [J].Journal of Transduction Technology,2007,20(2):477-480.
[5] 曹印妮,张东来,徐殿国.钢丝绳定量无损检测现状[J].无损检测, 2005,27(2):91-95.
Cao Yinni,Zhang Donglai,Xu Dianguo.The state-of-art of quantitative nondestructive testing of wire ropes [J].Nondestructive Testing,2005,27(2):91-95,
[6] 林阳子,张宇峰,赖广胜.桥梁缆索损伤检测技术分析[J].山西建筑,2010,36(12):291-293.
Lin Yangzi,Zhang Yufeng,Lai Guangshen.The analysis of the inspection technology of the damage of bridge cables [J].Shanxi Architecture,2010,36(12):291-293.
[7] 唐三元,黄德耕,赵俊伟.混凝土斜拉桥常见病害及产生原因[J].西部交通科技,2008(4):60-61.
Tang Sanyuan,Huang Degeng,Zhao Junwei.Common defects and causes of concrete cable-stayed bridges [J].Western China Communications Science & Technology,2008(4):60-61.
[8] 冯俊杰,汪浩.斜拉桥拉索病害检测及退化程度评估[J].中外建筑,2007(2):89-91.
Feng Junjie,Wang Hao.Defects inspection and degradation evaluation for stayed cables of cable-stayed bridge [J].Chinese and Overseas Architecture,2007(2):89-91.
[9] 余成波,杨菁,王培容,等.数字图像处理及MATLAB实现[M].重庆:重庆大学出版社,2003.
Yu Chenbo,Yang Jing,Wang Peirong,et al.Digital Image Processing in MATLAB [M].Chongqing:Chongqing University Press,2003.
[10] 夏良正,李久贤.数字图像处理[M].南京:东南大学出版社,2005.
Xia Liangzheng,Li Jiuxian.Digital Image Processing [M].Nanjing:Southeast University Press,2005.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
中国公路(2022年3期)2022-04-13
天津医科大学学报(2021年1期)2021-01-26
软件(2020年3期)2020-04-20
水道港口(2019年5期)2019-11-19
石油工程建设(2019年2期)2019-05-11
摄影之友(影像视觉)(2018年12期)2019-01-28
Coco薇(2017年8期)2017-08-03
自动化学报(2017年5期)2017-05-14
光学精密工程(2016年1期)2016-11-07
