基于Creo的木材装载机三维建模与工作装置运动仿真
2014-02-28 03:03:30李耀翔龙剑群
安徽农业科学 2014年15期
李耀翔,龙剑群
(东北林业大学工程技术学院,黑龙江哈尔滨150040)
木材装载机是一种森林采运机械,它的主体形态与一般类型装载运输机基本一致,主要区别在于其前端工作装置由颚爪型抓具替代了一般类型装载运输机的翻斗,同时支撑木材抓具工作的主体结构也随木材装载机的工作特点进行了相应的改进,主要应用于林业、港口、仓储企业等以木材装卸、搬运、归楞等操作为主的单位中[1]。CAD/CAM技术在加快产品研发效率的同时,能够模拟实际工况下产品受力情况,并利用所得出监测分析数据改进产品结构,保证产品质量。该技术已成为当今工业制造加工领域不可或缺的技术支持与辅助工具[2]。
随着三维造型软件的应用范围日益普及,很多大中型制造企业使用如Creo(Pro/ENGINEER的改进产品)、Auto CAD、CATIA、Solid Works、UG NX 等大型设计软件,企业使用CAD/CAM技术的机遇已经来临[3]。实践表明,CAD/CAM技术在改进产品质量、提高研发效率以及降低生产成本中占据非常重要的地位,是企业扩大市场占有率、提升市场竞争能力的强力对策[4]。虚拟造型技术的产生是现代研发设计技术和生产过程技术演化过程的高价值产物,是现代加工制造领域走向先进化、智能化的必然趋势[5]。
Creo Parametric是完全面向用户的组件装配的造模参数化应用软件,与早期手工绘制二维工程图的设计技术相比,三维建模技术与实例仿真技术弥补了绘制、修改工程图的繁琐和设计周期长的缺点,增强了新产品的研发速率和稳定性[6]。
1 工作装置参数化建模
木材装载机属于特殊工程机械,其工作装置的设计是木材装载机设计中的关键。该设计中工作装置由支撑臂、主动臂、抓具回转支撑梁、木材抓具以及液压缸构成。通过借助Creo Parametric中的草绘(Sketch)、拉伸(Extrude)、旋转(Revolve)、螺旋扫描(Helical Sweep)、造型(Style)、阵列(Pattern)、环形折弯(Toroidal Bend)等指令实现工作装置参数化实体建模[7]。木材装载机主要应用在林区贮木场的木材装卸、搬运作业中。为了在作业过程中木材装载机能够灵活地工作,其结构也应该适应木材较长的尺寸。图1为木材装载机工作装置机构简图。
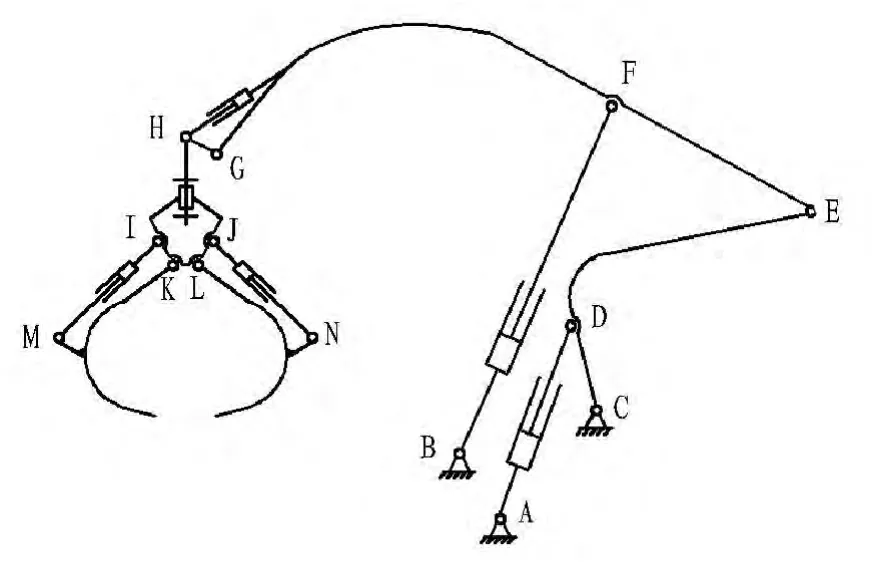
图1 木材装载机工作装置机构简图
1.1 支撑臂的建模 支撑臂是木材装载机工作装置与机体连接的“第一关节”,主要将承受木材抓具内木材等作业对象的重量传递给机体地盘并最终通过轮胎传递到地面。支撑臂需要具备较大的抗压能力,以降低作业过程发生重大事故的可能性。
为适应木材集材作业中原木普遍较长的工作情况,木材装载机前端工作装置要满足木材在抓具回转过程中与支撑臂、机体和主动臂不干涉的能力。通过草绘、拉伸、倒角、镜像、创建辅助面等基本操作即可完成建模(图2)。根据设计需要,可采用不同的建模方法,依次对所有零件进行特征建模,完成的零件可通过模型树(Model Tree)了解设计过程,灵活地对其进行修改。

图2 支撑臂
1.2 主动臂的建模 主动臂较长的结构是为了便于抓具旋转时木料拥有充足的空间,同时便于抓取楞堆离木材装载机较远和较高的木料。主动臂与支撑臂铰接,为方便木材在装卸作业中绕抓具支撑梁回转,主动臂通过拉伸并增加混合(Blend)操作指令进行设计(图3)。
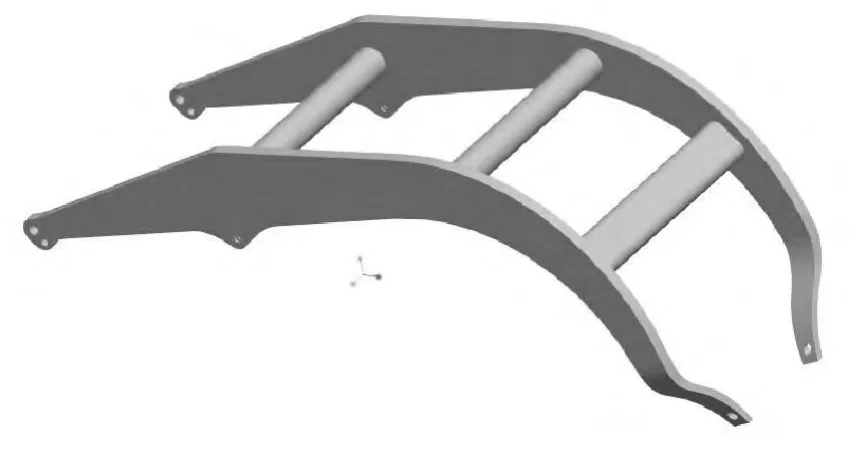
图3 主动臂
1.3 抓具回转与支撑梁的建模 回转支承梁与主动臂和双木材抓具进行铰接,其下端还留有与液压缸的铰接孔,以方便木材抓具在工作中进行张开、闭合动作。同时,抓具回转支撑梁中还包含一个液压马达,准确地说它是一个装配构件,而不是Creo中的PART。正因为支撑臂和主动臂的特殊结构,才使得木材抓具抓取原木时具有3个自由度,抓具回转支撑梁比常用反转六杆机构和正转四杆机构具有更好的灵活度,其三维模型如图4所示。
1.4 木材抓具的建模 为了便于原木在装卸时木材装载机能够在一定范围内转动,采用双侧液压缸进行张开和闭合能够提高工作中木材抓具和原木的稳定性。木材抓具的开闭机构双液压缸采用同一液压回路,抓具双侧液压缸采用并联形式,将每一液压缸与之对应的油路上分别调速阀进行串联,然后调节节流阀的设定值,便能够保证通过两侧互相并联的抓具液压缸的流量相同,从而有效改善和避免双侧缸同时开闭时木材抓具开闭角的不对称、工作时不同步的情况,其三维模型如图5所示。
2 组件装配与运动仿真
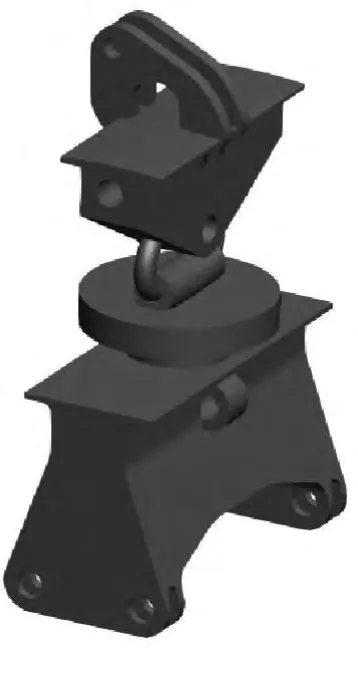
图4 支撑梁

图5 木材抓具
在机构模拟前,需将各组件进行装配。在Creo中进入机构分析模块即可进行组件装配,通过设定各组件间连接的相互关系,定位基准曲线和基准曲面进行各组件间方向和位置的约束。设置组件再生后的起始位置即“零点位置”,以便在进行再生模型时恢复到起始位置等步骤后便可对木材装载机工作装置组件进行装配。各组件之间的装配约束类型如表1所示。
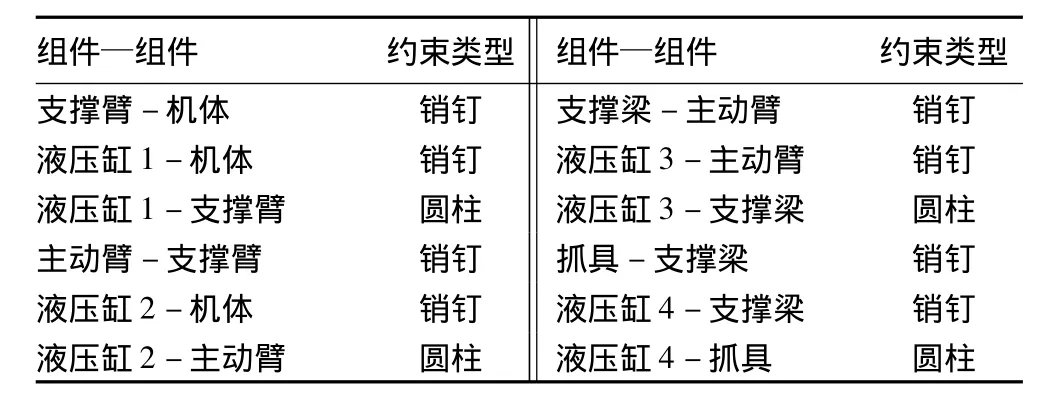
表1 工作装置各组件的装配约束类型
2.1 约束选择与组件装配 Creo中组件装配是对已造型好的各零部件进行约束定位过程,合理地选择零部件之间的约束关系才能确保在后续机构模拟中系统不会发出错误警报。将已装配好的木材装载机工作装置三维模型进行工程图转换,以便读者理解工作装置中各部件的配合关系(图6),木材装载机三维模型如图7所示。
2.2 工作装置运动仿真 在组件装配完后,进入Creo应用程序中的“机构”模块,在进行机构模拟前,需要对所模拟的对象进行初始条件以及伺服电机等初始环境的定义设置[8]。利用拖动元件中的快照功能生成初始位置Snapshot1快照,进入“插入”中的“初始条件”,将InitCond1初始条件定义选择Snapshot1快照即可完成初始条件的定义。
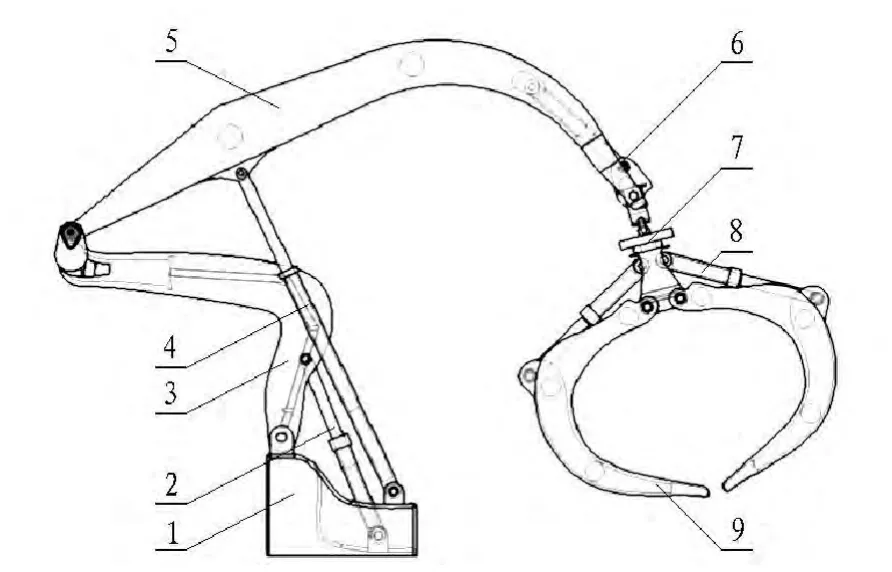
图6 工作装置装配

图7 木材装载机三维模型

图8 伺服电机的工作顺序
在Creo机构应用程序环境中要实现机构的运动模拟,必须定义Creo中的“伺服电动机”,它既可以表示移动副,也可以表示转动副,并不完全等同现实中普遍用于数控机床的伺服电机的原理。通过表1中的装配约束类型和木材装载机工作性质的考量,设定由支撑臂液压缸(液压缸1)、主动臂液压缸(液压缸2)、回转支撑梁液压缸(液压缸3)、木材抓具液压缸(液压缸4)以及抓具回转液压马达5个自由度的工作装置。由于Creo中“伺服电动机”设定的速度是常数,因此对同一个运动副需要同时设置速度为正负的2个“伺服电动机”。进入“分析”对话框,对5组10个“伺服电动机”进行时间定义(图8)。完成分析定义后即可运行木材装载机工作装置的机构模拟运动仿真,选取木材抓具前端某一点为分析点(PNT0),通过“测量”对话框可以分析出改点的运动状态和位置变化(图9)。
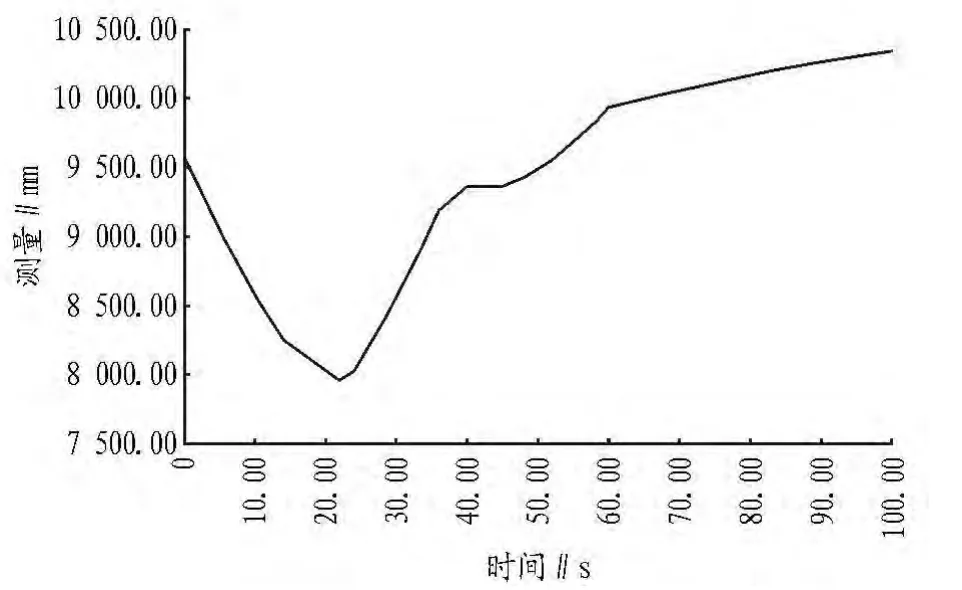
图9 木材抓具运动轨迹
3 结论
在Creo Parametric 2.0软件下进行木材装载机工作装置的三维造型工作,构建木材装载机的三维实例,并在机构程序环境中对已装配好的木材装载机工作装置进行运动仿真与分析。结果表明,应用Creo Parametric 2.0软件进行虚拟设计与组件装配技术对木材装载机进行三维建模、组件装配和工作装置的机构运动仿真能够便于木材装载机企业研发部门直观地观察木材装载机的模拟工作状态,对设计中存在的不足之处进行改进与优化。
[1]李惠卿.发展产品品种为林业生产现代化服务[J].林业机械,1983(1):9-10.
[2]成基华,马宗奎.国外CAD/CAM技术应用状况和发展趋势[J].经济管理与干部教育,1995(2):38-44.
[3]宰守香,冯锡兰.三维CAD技术在客车设计中的应用[J].机械设计与制造,2005(7):77-79.
[4]韦建兴.现代企业应如何选择三维CAD软件[J].中国科技信息,2005(4):10-13.
[5]KIMURA F.Product and process modeling as a kernel for virtual manufacturing environment[J].CIRP Annals-Manufacturing Technology,1993,42(1):147.
[6]姜俊杰.Pro/Engineer Wildfire高级实例教程[M].北京:中国水利水电出版社,2004.
[7]PINFOLD M.Design engineering-a need to rethink the solution using knowledge based engineering [J].Knowledge-Based Systems,1999,12(5):257.
[8]BRADLEY J.A modeling strategy for vehicle dynamics using Pro/ENGINEER[J].Sports Engineering,2008,11(3):119-130.
猜你喜欢
建筑与预算(2024年2期)2024-03-22 06:51:36
大自然探索(2024年1期)2024-02-29 09:10:32
能源工程(2022年2期)2022-05-23 13:51:50
军事文摘(2021年16期)2021-11-05 08:49:06
冶金设备(2020年2期)2020-12-28 00:15:26
重型机械(2020年2期)2020-07-24 08:16:20
重型机械(2020年2期)2020-07-24 08:16:16
装备制造技术(2019年12期)2019-12-25 03:07:36
石油化工建设(2015年6期)2015-12-01 04:17:35
太阳能(2015年11期)2015-04-10 12:53:04