
ZL29滤棒成型机组滤棒加速轮轮廓参数的设计
2014-02-23 08:09:19王志刚刘钰金风凯
烟草科技 2014年11期
王志刚,刘钰,金风凯
中烟机械技术中心有限责任公司,上海市浦东新区金海路1000号 201206
ZL29滤棒成型机组滤棒加速轮轮廓参数的设计
王志刚,刘钰,金风凯
中烟机械技术中心有限责任公司,上海市浦东新区金海路1000号 201206
为满足自主研发滤棒成型机组的需要,对ZL29滤棒成型机组滤棒加速轮轮廓参数的设计方法进行了研究。通过对滤棒加速原理进行归纳分析,对滤棒加速作了运动学分析计算,得出了速度和加速度规律,并提出了一种加速轮轮廓参数设计的计算方法。以100,120和132 mm 3种滤棒长度为例进行计算,并将计算结果与德国Hauni公司提供的设计数据对照。结果表明:计算结果与设计数据良好吻合,验证了该计算方法的正确性。该设计方法可用于滤棒成型机组的研发设计。
ZL29滤棒成型机组;滤棒加速;加速轮;轮廓参数;运动学
近年来随着纤维滤棒成型技术的日臻成熟和完善,我国的滤棒成型设备也经历了从无到有、从低速到高速、自主开发与引进技术交替进行的过程。伴随着众多项目的实施,国内学者对滤棒成型机组中成型机部分进行了较多研究,如成型枪[1]、布带轮[2]、纸盘架装置[3]等。滤棒加速技术作为成型机滤棒传输的重要组成部分,加速轮是实现加速运动所需的核心元件,其正确设计对于完成滤棒加速传输具有决定作用,而目前关于其设计方法的相关研究报道较少。ZL29滤棒成型机组是引进德国Hauni公司AF-KDF4成型技术研发的一种新型滤棒生产设备,滤棒加速采用先进的凸轮加速技术,其加速轮轮廓参数的确定是加速轮设计的关键。为此,通过研究滤棒加速原理并分析滤棒加速运动规律,提出了加速轮轮廓参数的设计计算方法,旨在为滤棒成型机组的自主研发设计提供依据。
1 滤棒加速原理
滤棒传输的机械结构见图1。滤条在切割位置处被切刀切割成等长度L的滤棒后,通过两个同步运动的加速轮加速,滤棒被拉开一定间隙,由连续相接变为间隔分离状态进入接收鼓轮轮槽中,经次级传递系统输出至下游机器。其中,加速轮外侧分布着负压吸孔,滤棒接触到加速轮后,依靠负压吸附在加速轮上,吸附负压由负压系统的真空风机提供,采用伺服电机独立驱动,根据不同的生产速度V调节负压值。加速轮轮廓为圆弧凸轮,滤棒在加速过程中由于负压吸附作用,与加速轮轮廓表面无相对滑动,通过加速轮转动一周,完成一次加速,滤棒获得一个与行进方向一致的纵向加速,以及与其行进方向垂直的横向加速。
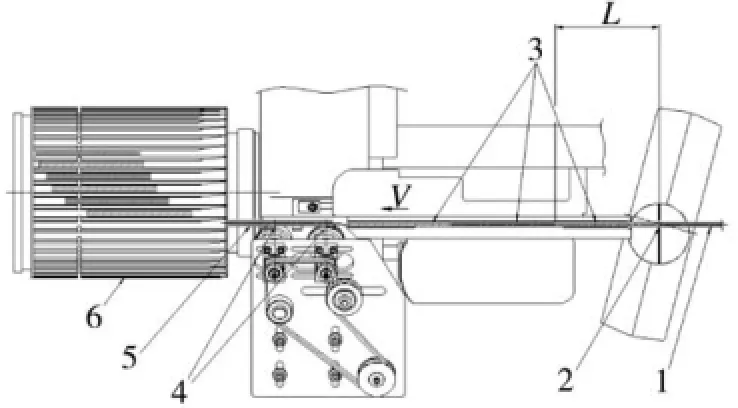
图1 滤棒传输机械结构示意图
滤棒加速完成时,前端面到达接收鼓轮端面,并获得最大的横向速度。该横向速度应与接收鼓轮轮槽中心的圆周速度一致,避免由于速度不匹配造成滤棒和接收鼓轮轮槽壁碰撞而影响滤棒品质,并将滤棒在恰当的位置传送至接收鼓轮中。生产不同长度规格的滤棒应选择相应轮廓参数的加速轮。
2 滤棒加速运动学分析计算
2.1 加速轮几何模型
两加速轮几何轮廓完全相同,由两段相切圆弧构成,见图2。其中,基圆圆弧半径为Rb;单圆弧凸轮半径为R,圆心角为φ,升程角为β;偏心距e=R-Rb,O为转动中心。
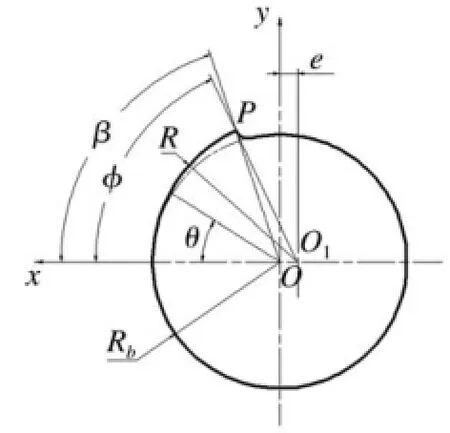
图2 加速轮几何模型
2.2 运动学分析计算
根据滤棒加速原理,单位时间内生产多少支滤棒则加速轮相应转动多少圈,故加速轮转速为:

式中:V为生产速度,m/min;L为生产滤棒的长度,mm。
那么,加速轮转动角速度ω为:

加速运动机构简图见图3。其中,V合为滤棒运动速度,V横为滤棒横向加速的速度,V纵为滤棒纵向加速的速度。
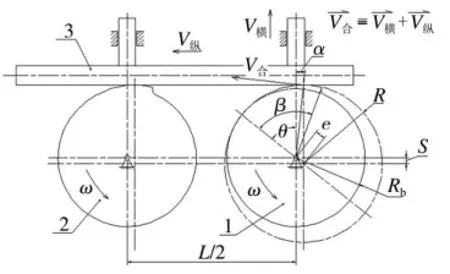
图3 滤棒加速机构简图
2.2.1 横向加速
横向加速为平底直动从动件凸轮机构,加速轮转动角度θ(图3)时,滤棒横向运动行程S[4-5]为:

式(3)两端对时间t求导,得滤棒横向加速的速度V横为:

式(4)两端对时间t求导,得滤棒横向加速的加速度a横为:

2.2.2 纵向加速
因滤棒在加速过程中与加速轮表面无相对滑动,故加速轮与滤棒接触点处的圆周速度即为滤棒运动速度V合。图3可见,滤棒横向加速的速度V横与纵向加速的速度V纵满足下式:

又有:

故由式(4)、式(6)和式(7)可得滤棒纵向加速的速度V纵为:

式(8)两端对时间t求导,得滤棒纵向加速的加速度a纵为:

2.2.3 加速度
由式(5)和式(9)可得,滤棒加速度a为:

由式(10)可知,对于一定长度规格的滤棒,加速度α的大小仅与生产速度V有关,且与V的平方成正比。为避免滤棒加速过程中吸附力过小而脱离加速轮表面,或吸附力过大而产生变形,造成滤棒圆度[6]不合格等问题,吸附力应尽量与滤棒脱离加速轮表面的力F(F=m滤棒a,m滤棒为滤棒质量)平衡或稍大。因此,加速过程中所需负压吸附力仅与生产速度V有关,这与前述原理中负压大小根据生产速度V变化而相应调节是相符的。
3 加速轮轮廓参数的设计
3.1 机械设置
在确定加速轮轮廓前,首先设定机械设置条件:
(1)加速轮与接收鼓轮应调整到确定的机械位置,见图4。将两加速轮的中心距设置为L/2,加速轮2转动中心至接收鼓轮端面的距离为(L/2-δ)。其中,δ为预先设定的加速完成后滤棒尾端至后加速轮加速段轮廓边缘的距离。预留距离δ的目的是为了保证滤棒脱离加速轮进入接收鼓轮时得到充分的横向加速。
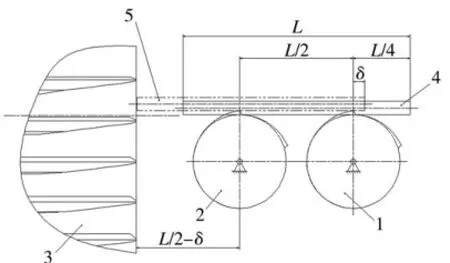
1.加速轮1 2.加速轮2 3.接收鼓轮4.加速开始位置的滤棒5.加速结束位置的滤棒
(2)加速轮与接收鼓轮的转速应满足确定的匹配关系。接收鼓轮模数[7]m=5.5 mm,轮槽数Z=42,每生产一支滤棒转动一个轮槽位置,那么接收鼓轮转动的角速度ω鼓轮为:

3.2 加速轮轮廓参数的确定
3.2.1 计算方法
需要确定的加速轮轮廓参数有Rb,R和β,3个参数相互关联,彼此满足一定的约束关系。现结合加速原理、运动分析结论及机械设置条件,对轮廓参数进行分析求解。
(1)满足加速轮基圆圆周速度稍大于或等于生产速度V的条件,使滤棒平稳过渡到加速轮上,可得:
计算时先取边界条件等式:

(2)加速完成时,θ=β。根据加速原理,此时应满足条件:

接收鼓轮轮槽中心处的半径r鼓轮为:

则由式(11)和式(15)可得接收鼓轮轮槽中心处圆周速度V鼓轮为:

由式(4)、式(15)和式(16)可得:

(3)如图2所示,在ΔOO1P中,依正弦定理有:

即:

(4)如图4所示,滤棒自加速开始至加速结束沿前进方向的位移,应与加速轮加速段的弧长相等,即:

(6)联立式(13)、式(17)、式(19)、式(20)和式(21)得方程组:

式(22)为非线性方程组,需借助数值解法,利用MATLAB软件的fsolve函数[8-10]编程求解,可得到Rb,R,β,e,φ的值。
(7)选用基圆半径Rb为优先数,取R80系列[4],将上述计算所得的Rb值按式(12)的要求圆整为R80系列中的优先数;由式(17)可知e≥2.75,将解得的偏心距e规范为标准值,供选值是以0.05 mm为公差的等差数列[2.75,2.80,2.85,2.90,2.95,3.00,…],按就近原则选取;再由式(17)计算β。由此可最终确定轮廓参数Rb,R,β的值。
3.2.2 计算验证
分别取滤棒长度100,120和132 mm,预先设定δ为5 mm,按上述计算方法求解得出加速轮轮廓参数,并与德国Hauni公司提供的加速轮设计数据进行对比,见表1。可见,求解结果与Hauni公司设计数据良好吻合,验证了该计算方法的正确性。
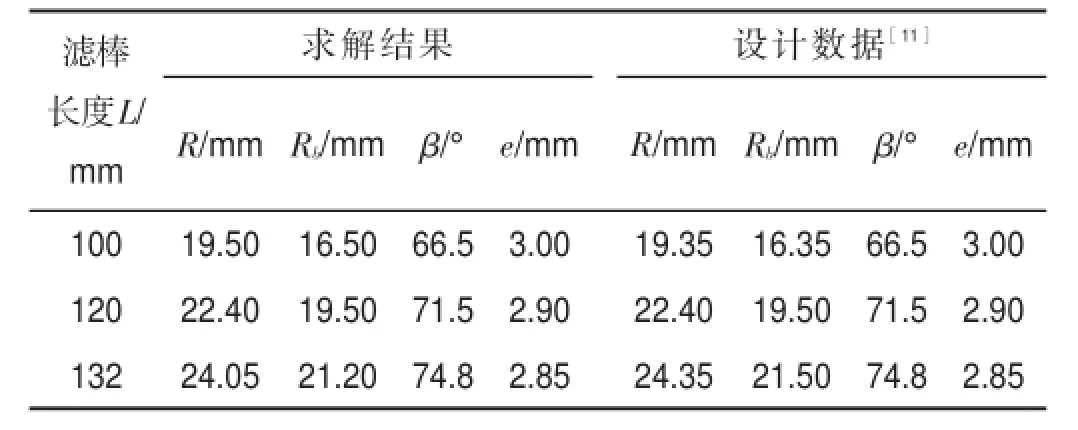
表1 加速轮轮廓参数求解结果与设计数据对比
4 结语
对ZL29滤棒成型机组滤棒加速原理进行了归纳分析,并对滤棒加速作了运动学分析计算,得出了速度和加速度规律,在此基础上研究总结了加速轮轮廓参数的设计计算方法。以常用的3种滤棒长度为例进行计算,并将计算结果与德国Hauni公司提供的原始设计参数对比,结果良好吻合,验证了该设计计算方法的正确性。该方法可用于滤棒成型机组的自主研发设计或设备改造。
[1]刘春林.ZL22滤棒成型机组成型枪冷却系统的改造[J].烟草科技,2007(3):29-30.
[2]韩红彬.一体式布带轮在ZL27型滤棒成型机组上的应用[J].烟草科技,2011(10):24-25.
[3]韩红彬.KDF2滤棒成型机组纸盘架装置的改进[J].烟草科技,2011(12):23-25.
[4]成大先.机械设计手册:第1卷[M].5版.北京:化学工业出版社,2007.
[5]李红强,钱志良,鹿霖.平底从动件盘形凸轮机构的研究[J].机械设计与制造,2005(2):26-28.
[6]GB/T 5605—2002烟草和烟草制品醋酸纤维滤棒[S].
[7]程卫民,孙斌,赵朝阳,等.PROTOS2-2高速卷接机组调头轮技术的改进[J].烟草科技,2010(1):15-17.
[8]阳明盛,熊西文,林建华.MATLAB基础及数学软件[M].1版.大连:大连理工大学出版社,2003.
[9]TheMathWorks,Inc.MATLABreferenceguide-high performance numeric computation and visualization software[M].New York:The Math Works,Inc,1992.
[10]李耀辉,刘保军.非线性代数方程组实根求解研究现状综述[J].武汉科技大学学报:自然科学版,2004,27(3):326-330.
[11]德国Hauni公司.KDF4运动学和动力学分析计算[G].2012.
Design for Profile Parameters of Filter Rod Accelerating Wheel in Filter Rod Maker ZL29
WANG Zhigang,LIU Yu,and JIN Fengkai
China Tobacco Machinery Technology Center Co.,Ltd.,Shanghai 201206,China
In order to develop a new filter rod maker,the design method for the profile parameters of filter rod accelerating wheel in filter rod maker ZL29 was studied.By kinematics analysis,the velocity and accelerated velocity were obtained,and the calculation method for profile parameters of filter rod accelerating wheel was summarized.By taking the filter rods of 100,120 and 132 mm in length as examples,the calculated results were compared with the design data provided by Hauni.They were well agreed,it verified the correctness of the calculation method.
Filter rod maker ZL29;Filter rod accelerating;Accelerating wheel;Profile parameter;Kinematics
TS457
B
1002-0861(2014)11-0018-04
王志刚(1973—),硕士,工程师,主要从事滤棒成型机的设计与开发。E-mail:13585681916@163.com
2014-04-29
责任编辑:曹娟E-mail:cj254@126.com
电话:0371-67672669
猜你喜欢
设备管理与维修(2022年21期)2022-12-28 07:34:02
中学生数理化·八年级物理人教版(2022年5期)2022-06-05 06:57:38
设备管理与维修(2021年1期)2021-03-05 04:05:56
科技与创新(2020年16期)2020-11-29 07:07:39
商品与质量(2019年42期)2020-01-17 08:07:50
现代工业经济和信息化(2016年2期)2016-05-17 05:34:16
中国医学影像学杂志(2015年9期)2015-12-15 11:03:26
湖南工业大学学报(2014年1期)2014-05-06 06:36:36
导航定位与授时(2014年2期)2014-04-27 13:41:09
中国设备工程(2013年1期)2013-10-21 11:54:24
