GPS控制网的两种观测模式的对比试验
2014-02-19 05:15李存文
地理空间信息 2014年4期
李存文
(1. 河南省测绘工程院,河南 郑州 450003)
本文对GPS 控制网采用“传统网观测模式”和“基于卫星连续运行基准站网的点观测模式”,进行两种模式的网平差计算、成果对比和精度检核。两种模式采用同样的已知点和待观测点。
1 两种观测模式概述
传统网观测模式:多台接收机在不同测站上进行同步观测,在完成一个时段的同步观测后,又迁移到其他测站进行同步观测,每次同步观测都可以形成一个同步图形。在测量过程中,不同的同步图形间一般有若干个公共点相连,整个GPS网由这些同步图形构成[1,2]。一般采用5~7台GPS接收机,采用边连接和点连结相结合的方式。
基于卫星连续运行基准站网的点观测模式:在卫星连续运行基准站进行观测的同时,另外一些接收机则在这些基准站周围相互之间进行同步观测[3,4]。一般利用1台GPS接收机,充分利用其周边的卫星连续运行基准站网点24 h观测数据同步观测。
基于卫星连续运行基准站网的点观测模式相对于传统网观测模式的优点是:
1)不需要未知站之间的同步观测,即测量人员到达未知站后即可开展观测,观测结束即可搬站,到站即测,测完即走,而不需考虑其他作业人员的情况。
2)根据测区的实际情况,可利用1台GPS接收机采集数据,也可多台GPS接收机采集数据,且相互之间不受影响。
3)所布设的GPS网,由于在各个基准站之间进行了长时间的观测,因此可以获得较高精度的定位结果,这些高精度的基线向量可以作为整个GPS网的骨架,具有较强的图形结构[5,6]。
基于卫星连续运行基准站网的点观测模式的缺点是未知站与基准站的距离较大,对整周模糊度的解算可能会造成影响[7]。
2 观测网图与结果对比
试验区为河南省南阳市某一区域,面积约26 km2。两种模式均联测2个已知点,静态观测时间均大于1 h,采样间隔为15 s,截止高度角为15°[5],基线解算和平差软件均采用TBC2.60(天宝商用软件)。坐标系为1980西安坐标系,投影采用高斯-克吕格投影,按6°分带,中央子午线为111°;高程基准为1985国家高程基准, 高程均依据全省似大地水准面精化模型求取。试验区两种观测模式观测网图如图1、图2所示。
两种观测模式结果比较(传统网成果-基于基准站成果)如表1所示。

表1 成果差值比较表
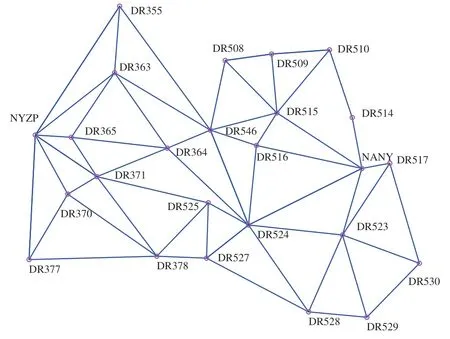
图1 传统网观测网图

图2 基于基准站观测网图
从表1可知X差值最大值-0.003 m(DR516),最小值0.000 m(DR370);Y差值最大值-0.003 m(DR355),最小值0.000 m(DR370);H差值最大值-0.038 m(DR378),最 小 值0.000 m (DR522)。NANY、NYZP为CORS基准站点号。
通过试验可以得出,GPS控制网(D级、E级)使用“基于卫星连续运行基准站网的点观测模式”代替“网观测模式”,可以满足相关规范要求,同时节省因同步观测带来的时间浪费、人员设备浪费,提高了工作效率。
[1]李德仁.论RS、GPS与GIS集成的定义、理论与关键技术[J].遥感学报,1997,1(1):8-10
[2]刘基余.GPS卫星导航定位原理与方法[M].北京:科学出版社,2003
[3]过静珺,王丽,张鹏.国内外连续运行基准站网新进展和应用展望[J].全球定位系统,2008,34(1):22-25
[4]刘经南,刘晖.连续运行参考站网络——城市空间数据的基础设施[J].武汉大学学报:信息科学版,2003,28(6):203-208
[5]CJJ/T73-2010.卫星定位城市测量技术规范[S].
[6]李征航,张小红.卫星导航定位新技术及高精度数据处理方法[M].武汉:武汉大学出版社,2009
[7]张小红.动态精度单点定位(PPP)的精度分析[J].全球定位系统,2006,31(1):10-12
猜你喜欢
电子技术与软件工程(2022年6期)2022-07-07
高师理科学刊(2020年2期)2020-11-26
中成药(2017年6期)2017-06-13
中国农村水利水电(2017年10期)2017-03-22
浙江大学学报(工学版)(2016年2期)2016-06-05
通信电源技术(2016年6期)2016-04-20
电子科技(2015年11期)2015-03-06
太空探索(2014年4期)2014-07-19
安徽工业大学学报(自然科学版)(2014年4期)2014-07-11
治淮(2011年6期)2011-01-31