
改进直接转矩控制在海上风力机模拟中的应用
2014-02-13 09:26袁晓玲黄宇宙易文杰刘皓明
电力建设 2014年4期
袁晓玲,黄宇宙,易文杰,刘皓明
(河海大学能源与电气学院,南京市211100)
0 引言
随着对风能的开发利用,人们把视线逐渐投向了更具前景的海上风电,在海上风电的开发利用中,永磁直驱风力发电机相对于双馈异步发电机显现出了其固有的优势[1-2]。但是实验室并不具备自然条件下的海上风场环境,因此如何在实验室条件下对风力机进行模拟是必要的。目前有文献探讨了实验室风力机的模拟,但并没有针对运行于低速范围内的海上永磁直驱风力发电机进行特定研究[3]。实验室风力机模拟主要基于直流电机和异步电机,直流电机调速性能优异,但存在电刷和滑环且仅限于模拟小功率风力机[4]。文献[5]进行了基于无刷直流电机的改进,但电机本身及控制系统的复杂性限制了它的应用。基于异步电机的风力机模拟系统主要采用高性能交流调速技术控制,其缺点是低速范围内的控制性能较差[6]。文献[7]进行了基于控制算法改进的研究,但这并没有从根本上改变模拟系统中电机参数变化的缺点,使其并不能很好地适用于低速运行的永磁直驱风力发电机。
为适应低转速的海上永磁直驱风机,本文采用基于定子磁链自适应观测器和定子电阻在线辨识改进的直接转矩控制技术,在保留直接转矩控制技术控制简单、响应迅速、安全可靠等优点的同时改善其在低速范围内转矩脉动大的缺点。
1 风力机模型及其运行特性
风力机是捕获风能,将风能转化为机械能的装置。本文的风力机数学模型采用基于Betz理论建立的风力机空气动力学模型机[8],其输出转矩如式(1):

式中:ρ为空气密度;v为风速;R为叶片半径;CT=Cp/λ,为转矩系数,Cp为风能利用系数,λ为叶尖速比,如式(2):
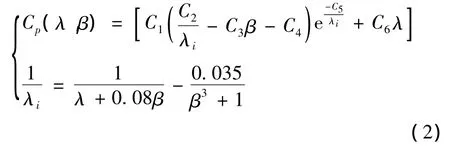
式中:C1=0.5176,C2=116,C3=0.4,C4=5,C5=21,C6=0.0068;空气密度ρ=1.224 kg/m3,β为桨距角,为简化起见,本文采用定桨距系统,β=0。

图1 风力机t-ω曲线Fig.1 t-ω curves of wind turbine
2 改进直接转矩控制技术
直接转矩控制技术是利用空间矢量、定子磁场定向的分析方法,直接在定子坐标系下分析电机的数学模型,计算与控制电机的磁链和转矩,采用离散的两点式调节(Bang-Bang控制)产生PWM波信号,对逆变器的开关状态进行控制,以获得高动态性能的转矩输出。直接转矩控制技术省去了复杂的矢量变换与电机数学模型简化处理,没有通常的PWM信号发生器,控制结构简单,控制手段直接。但由于系统采用滞环比较器以及定子电阻随电机温度变化导致直接转矩控制在低速时转矩脉动大。
本文基于全阶自适应定子磁链观测器和定子电阻在线辨识,降低直接转矩控制低速时的脉动。
2.1 全阶自适应定子磁链观测器
传统的磁链观测模型为U-n,I-n或者U-I等开环估计模型[9],但是在低速范围内,由于定子电阻压降的影响,3种磁链观测模型都不能准确地对电机磁链进行精确观测,甚至不能正常工作,因此有必要对其进行改进。本文采用闭环自适应观测器建立全阶自适应定子磁链观测模型。两相静止坐标系下,以X=为状态变量的异步电机数学模型为

以实际电流is和观测电流的差值构成自适应校正项,则有[10]:

MDEA溶液吸收性能评价装置主要由溶液吸收解吸系统、温度控制系统、压力控制系统、气体供给系统、在线分析系统和数据采集系统组成,溶液吸收解吸系统的有效容积为300 m L,内置磁力搅拌器和鼓泡吸收管,利用温度控制系统对其温度进行控制,控温范围为5~250℃,恒温波动不大于0.05℃,通过前、后背压阀控制其压力,控压范围为0~10 MPa,精度可达±0.1 MPa。分别将PT100型温度变送器、3051TA型压力变送器、LXI-B型气体流量计以及EC9820型二氧化碳在线分析仪、EC9852型硫化氢在线分析仪经数据采集系统与微型计算机相连,对整个装置的运行状况进行监视和调整。

根据式(5)得全阶自适应定子磁链观测模型如图2所示。
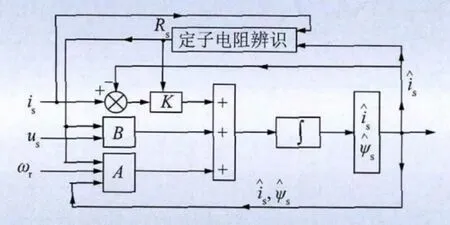
图2 自适应定子磁链观测器结构图Fig.2 Observer structure of adaptive full-order stator flux
2.2 定子电阻在线辨识
电机运行时,定子电阻不是固定的,其阻值会随着电机温度的变化而呈现非线性变化,极端情况甚至能够达到静态值的1.49倍[11]。同时,电机在低速运行时会受电机本身参数变化的影响,相对于其他参数,定子电阻变化是影响电机运行的主要因素,并且转速越低影响越大,因此有必要对其进行在线辨识[12]。
在电机静态参数已知的情况下,把电机动态的定子电阻当作未知变量进行在线辨识,由于电机的参数变化时间远大于电磁时间常数和转速变化,因此利用系统的状态误差方程和Lyapunov稳定性理论,可以推导出定子电阻在线辨识的系统解[13]。根据式(3)和(5)的差可得状态误差方程如式(6):


式中:η>0为正常数。对上式求导并代入式(6)得:

要使观测器稳定,在合理选取增益矩阵K使得式(8)右端第一项为负的情况下使后2项之和为0,使式(8)为负定,即:

整理得:

式中Ki为积分系数,且Ki≤0。
3 仿真分析
3.1 仿真结构图
用异步电机模拟海上风力机,实际就是在已知风速的情况下,由异步电机的输出转矩和转速模拟风力机的T-ω特性,使其随着风速和给定叶尖速比的不同而平滑、快速、精确、稳定地移动于各条特性曲线上。因此,把风速和反馈的异步电机转速作为风力机数学模型的输入信号,其输出的转矩信号作为电机的控制信号接入直接转矩控制模块,图3为基于改进直接转矩控制的海上风力机模拟系统结构图。
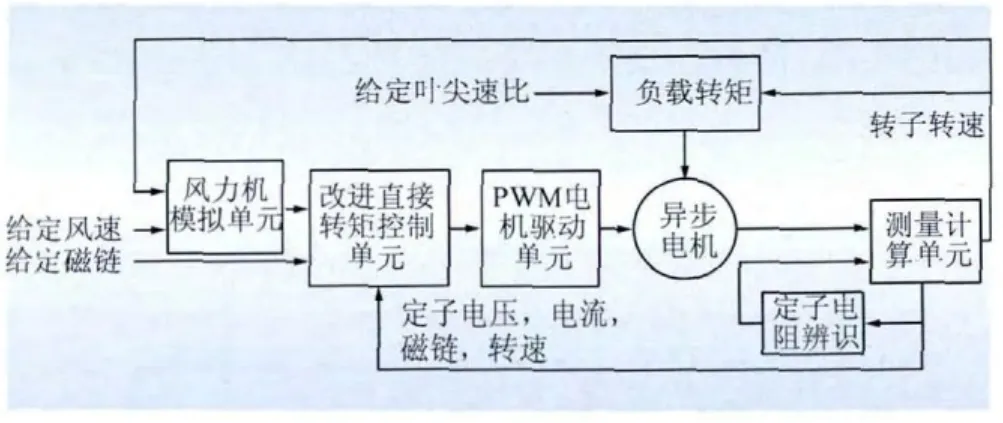
图3 改进直接转矩控制海上风力机模拟系统结构图Fig.3 Simulation system structure of offshore wind turbine based on improved direct torque control
异步电机负载转矩[14]为:

式中:λ*为给定的风力机叶尖速比;为给定叶尖速比下的转矩系数。
根据图3和式(11),建立风力机模拟系统仿真模型如图4。
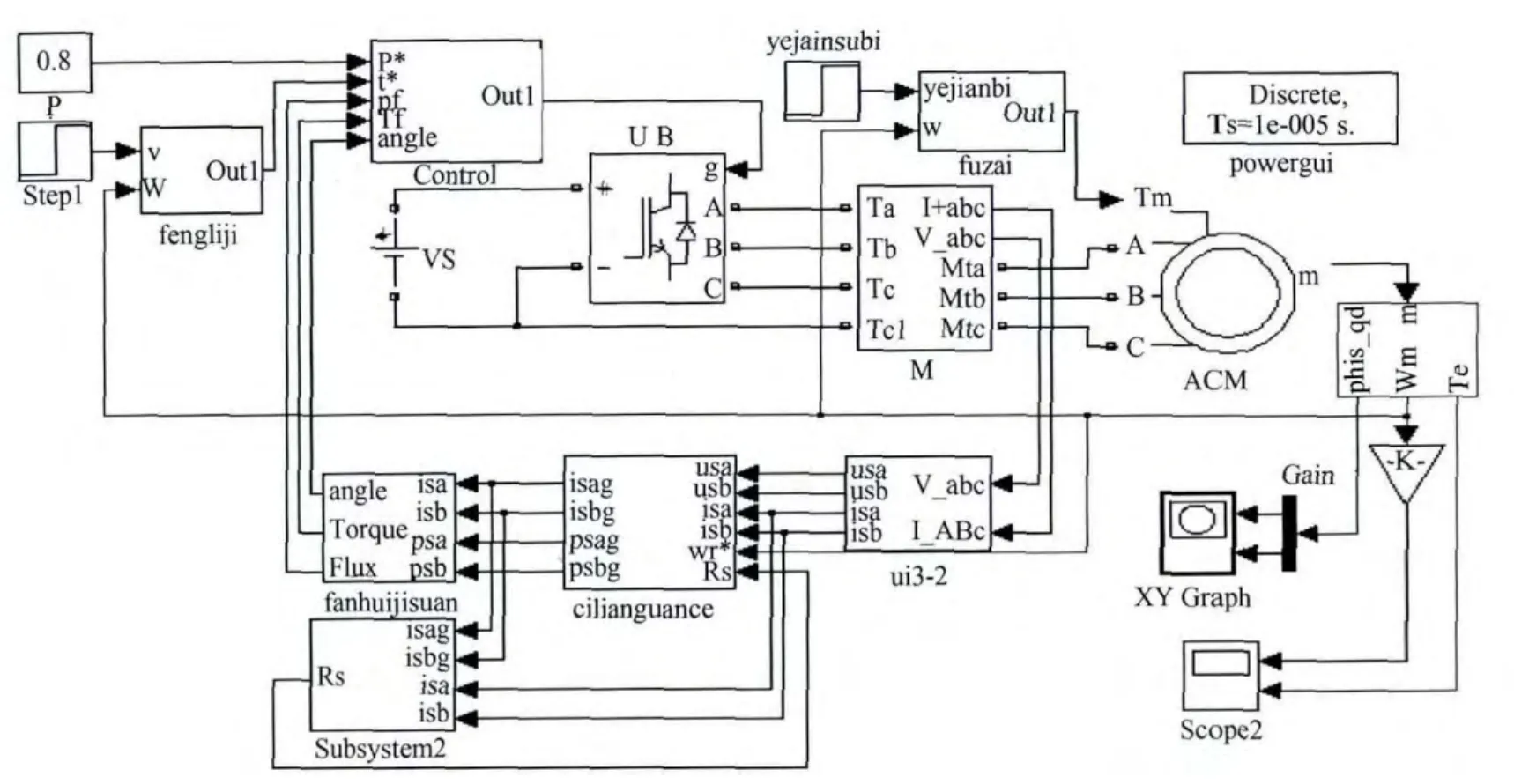
图4 风力机模拟系统仿真图Fig.4 Simulation system of wind turbine
3.2 改进系统仿真结果
图4所示的海上风力机模拟系统仿真中,设给定风速和给定叶尖速比分别为6 m/s和λopt=8.4,随着转速的上升,风力机最终稳定在图1所示的A点(ω =147 r/min,T=32.5 N·m)。
(1)自然条件下,风速不会固定不变,设风速由6 m/s上升为8 m/s,电机重新稳定运行于B点(ω=195.8 r/min,T=57.5 N·m),仿真结果如图5(a)所示。
(2)若给定风速不变,给定叶尖速比由λopt=8.4上升为λ2=12,此时风力机由A点变化到C点(ω =209 r/min,T=26.4 N·m)稳定运行,仿真结果如图5(b)所示。
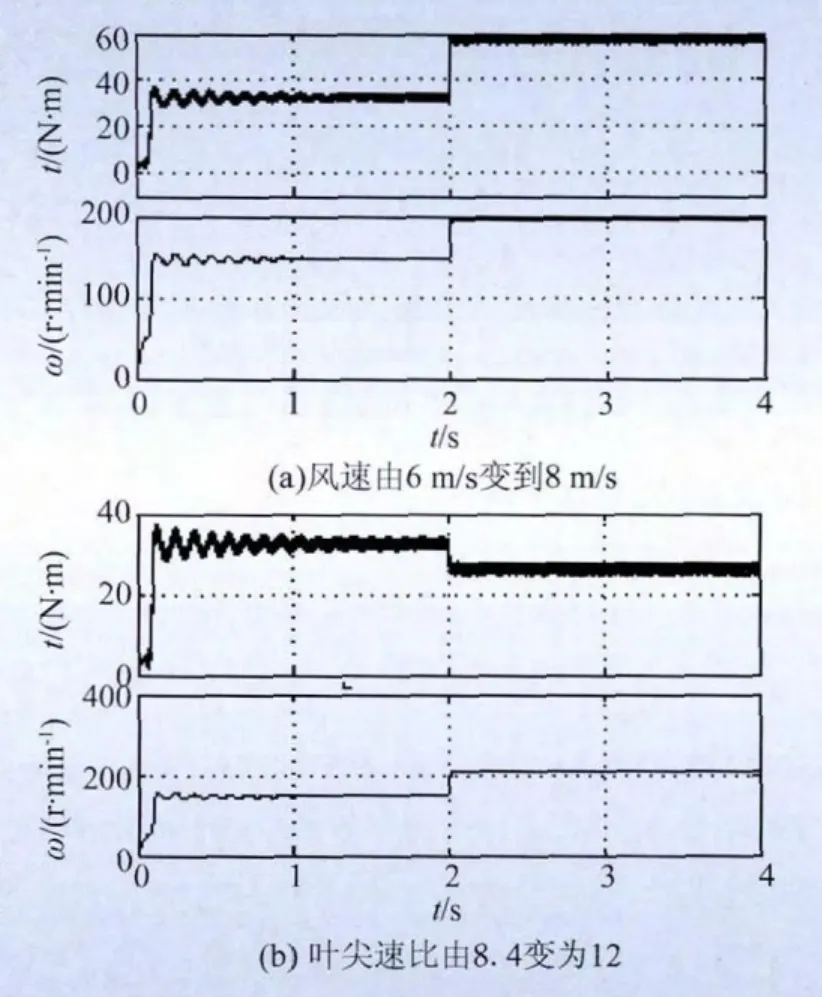
图5 改进后海上风力机系统的转矩、转速变化情况Fig.5 Torque and speed changes of offshore wind turbine after inproved
由图5可知,当风速和叶尖速比已知时,模拟风力机输出转矩和转速能够稳定运行在风力机输出特性曲线上,且能够随着风速和给定叶尖速比的变化而迅速变化,响应时间短,与图1所示的风力机输出转矩转速变化吻合,由此可知,基于改进直接转矩控制的异步电机有效地模拟了实际海上风力机输出特性。
3.3 仿真结果对比与分析
基于永磁直驱同步发电机的风力机主要运行于低速范围内,因此以A点为例,当系统稳定运行于A点,且设极端情况下定子电阻由1.824 Ω升高到2.75 Ω时,改进前后定子电流、输出转矩波动和磁链跟踪结果如图6。

图6 定子电流和输出转矩Fig.6 Stator currents and output torque fluctuations
由图6可知,改进前后定子电流波动分别达到了±1.5 A和±0.5 A,可见改进后精度提高了66.7%,波动明显减小;改进前后输出转矩波动分别为±7 N·m和±1 N·m,相对误差由21.5%提高到了3.1%。由此可见,基于全阶自适应定子磁链观测器改进的直接转矩控制系统较传统直接转矩控制系统,在低速范围内电机的定子电流和输出转矩波动有了明显的改善,因此更适合应用于低速运行的永磁直驱同步风力发电机模拟系统中。
图7对比了改进前后定子电阻变化时的电机磁链观测器的观测结果,图7(a)为无定子电阻在线辨识情况下,电机定子磁链给定值为0.8 Wb,但实际测量值为0.56 Wb,误差达到30%;图7(b)为基于定子电阻在线辨识改进后,电机定子磁链稳定在0.82 Wb,误差为2.5%。
图8显示了改进前直接转矩控制因定子电阻变化而产生的影响,与图5对比可知,由定子电阻改变而引起的磁链观测误差(如图7(a)所示)使得风速增大时电机转速并不增大,完全偏离如图1所示的风力机输出转矩转速变化,最终导致控制失败,结果如图8(a)所示;当叶尖速比改变时虽然控制成功,但也引起了转矩波动的进一步加大,如图8(b)所示,由波动±1 N·m变为±2 N·m。对比分析可见,相对于传统无定子电阻在线辨识改进的系统,异步电机控制系统受定子电阻变化的影响明显减小,从而使系统鲁棒性增强,能够更精确的跟踪磁链变化,控制性能明显改善。
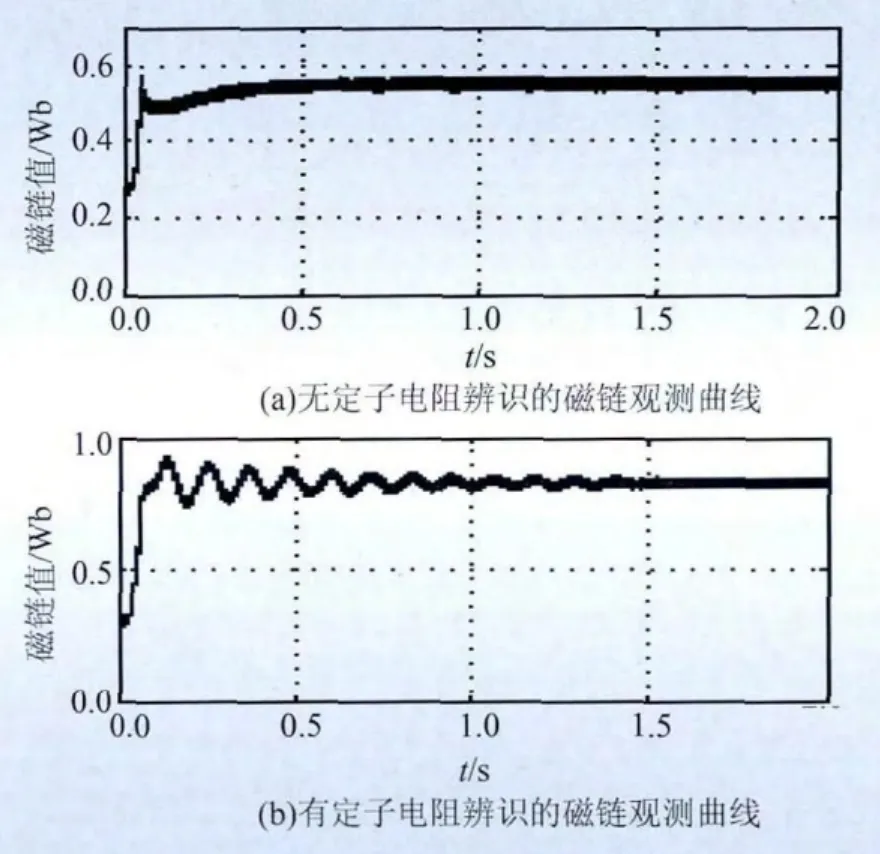
图7 磁链观测曲线Fig.7 Observed flux curve
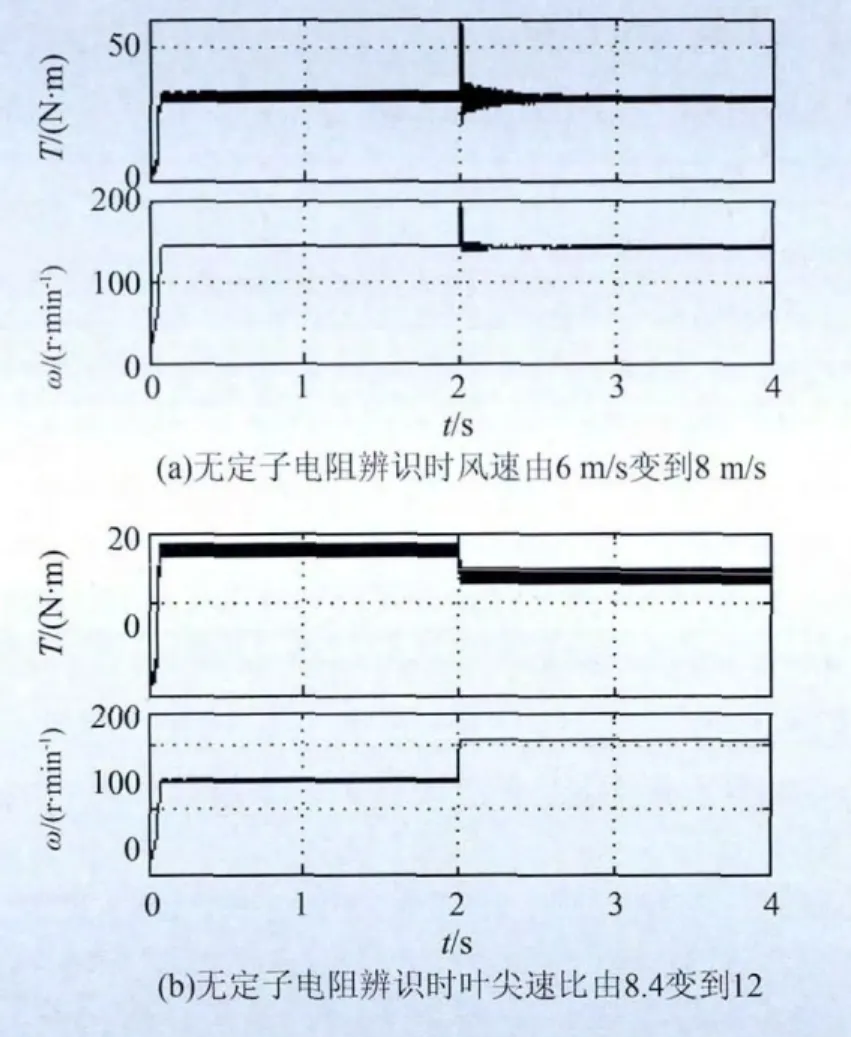
图8 海上风力机系统无定子电阻辨识的转矩、转速变化Fig.8 Torque and speed changes of offshore wind turbine without stator resistance observer
4 结语
本文分析了风力机的输出特性,采用异步电机模拟风力机输出特性实现海上风力机模拟控制。基于全阶自适应磁链观测器和定子电阻在线辨识改进的直接转矩控制技术,有效地减小了系统在低速范围内的转矩和电流脉动,使之更适用于低速转动的永磁直驱同步风力发电机系统。在改进直接转矩控制技术基础上,利用MATLAB/SIMULINK仿真平台搭建了风力机模拟系统,模拟了风力机的输出t-ω特性曲线。仿真结果表明基于改进直接转矩控制的风力机模拟系统提高了控制系统的稳定性和鲁棒性,并且有效跟踪了不同风速和叶尖速比情况下的转速转矩变化,为海上风力机控制提供了模拟实验控制基础。
[1]薛玉石,韩力,李辉.直驱永磁同步风力发电机组研究现状与发展前景[J].电机与控制应用,2008,35(4):1-5.
[2]李军军,吴政球,谭勋琼,等.风力发电机其技术发展综述[J].电力建设,2011,32(8):64-72.
[3]辛付龙,张建华,王健.海上风力发电的风速和风轮机的输出转矩[J].大电机技术,2011,5(3):15-19.
[4]王前双,胡育文,黄文新.风力机模拟技术综述[J].电机与控制应用,2010,37(3):1-6.
[5]李吉晨,周波,薛峰.基于无刷直流电机的风力机模拟特性[J].电力自动化设备,2012,32(10):17-21.
[6]赵梅花,阮毅,沈阳,等.基于风机特性模拟的风力发电系统[J].电机与控制应用,2011,38(3):51-56.
[7]王新新,惠晶.基于模糊神经网络DTC的风力机特性模拟[J].电力电子技术,2011,45(9):49-51.
[8]刘钰山,葛宝明,毕大强,等.基于直接转矩控制的风力机模拟系统[J].电力系统保护与控制,2010,38(18):140-144.
[9]王成元,夏加宽,杨俊友,等.电机现代控制技术[M].北京:机械工业出版社,2006:198-208.
[10]廖永衡,冯晓云,王珍.基于定子磁链滑模观测器的异步电机空间矢量调制直接转矩控制[J].中国电机工程学报,2012,32(18):88-97.
[11]王红梅,阮毅,徐静.定子电阻变化对异步电机按定子磁场定向控制系统性能的扰动分析[J].电气传动自动化,2004,26(1):14-17.
[12]黄志武.无速度传感器直接转矩控制策略的研究[D].长沙:中南大学,2006.
[13]奚国华,沈红平,喻寿益,等.基于全阶状态观测器的无速度传感器 DTC 系统[J].电气传动,2008,38(7):22-25.
[14]王超,黄文新,王前双.基于异步电机的风力机特性模拟[J].电力电子技术,2010,44(6):7-9.
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
内燃机与配件(2020年3期)2020-09-10
电子制作(2018年1期)2018-04-04
电子制作(2017年23期)2017-02-02
汽车工程(2016年11期)2016-04-11
焊接(2015年1期)2015-07-18
汽车工程(2014年7期)2014-10-11
组合机床与自动化加工技术(2014年10期)2014-03-01
