基于单片机的云台监控控制器的设计
2014-02-11 02:48李明海徐轶群
机电工程技术 2014年9期
李明海,徐轶群
(集美大学轮机工程学院,福建厦门 361021)
基于单片机的云台监控控制器的设计
李明海,徐轶群
(集美大学轮机工程学院,福建厦门 361021)
云台监控控制器主要由主电路控制部分、云台部分和摄像头部分三部分组成。以89s51单片机为核心处理模块,以型号为CSM100的CAN模块为数据传输模块,用户通过上位机由串口助手发送串口数据指令控制云台监控的动作,同时接收控制器反馈回来的数据信息。89s51单片机通过对指令的处理实现控制4个继电器,由继电器控制云台的上下左右转动;89s51单片机控制另2个继电器实现摄像头倍率的大小调节。上位机经过RS232实现数据的发送与接收。
单片机;云台;摄像头;继电器
0 引言
随着社会科技信息化,视频监控、远程监控、监控系统、安防设备、云台支架等应运而生,云台监控已成为重要角色之一。云台监控可用于机场、火车站、汽车站、办公楼等公共场所的安防监控;可用于公安机关对相关证据的搜集;可用于住宅区安全管理;可用于学校的考试监控和宿舍安防的保障……云台监控适用于对大范围进行扫描监视,它可以扩大摄像机的监视范围[1]。云台监控高速姿态是由两台执行电动机来实现,电动机接受来自控制器的指令准确地运行进行定位。在控制指令的作用下,云台上的摄像机既可自动扫描监视区域,也可在监控中心值班人员的操纵下跟踪监视对象。云台监控广阔的市场前景与可应用性将赋予它存在的重要意义!
1 控制器组成及工作原理
本设计原理图如图1示,该设计控制单元采用51系列单片机为控制单元。该单片机将程序存储器、数据存储器、处理器还有一些特殊设备(如模拟-数字转换器)等都集成在一块芯片中,系统结构紧凑,功能简单,成本低,适合低成本的电器控制。上位机的通讯通过CAN模块来实现。控制器局域网 (Controller Area Network,CAN)模块是一个串行接口,用来与其他CAN模块或数字信号控制器进行通信。此接口/协议设计为允许在噪声环境下进行通信。本设计采用嵌入式CAN转UART模块CSM100来实现有CAN-bus通讯接口的仪器、仪表设备的项目设计。CSM100具有8bit微处理器,CAN控制器,CAN收发器,电源电路,隔离电路,总线保护电路。模块尺寸31.5 mm×19.9 mm×6.5 mm的24引脚封装,该模块不需要接任何外围元件就可以使设备通过UART端口连接到CAN-bus网络中。UART输出为TTL电平;模块特性如下:供电电压为Vcc=5 V,icc<70 mA;工作温度-40℃~85℃;隔离电压为直流2 500 V;支持CAN2.0A,CAN 2.0B协议。内置一路UART输出通道,一路CAN-bus输出通道,最高帖流量为400帖/秒[2]。
用户在上位机上通过串口助手用串口数据线发送数据。串口助手发送命令要选用十六进制数发送并显示。用户在串口助手上发送指令,也可以在接收窗口看到你发送的指令。控制单元通过接收指令坐出相应操作控制继电器的开合来控制云台的上下,左右的转动,同时控制摄像头的倍率。
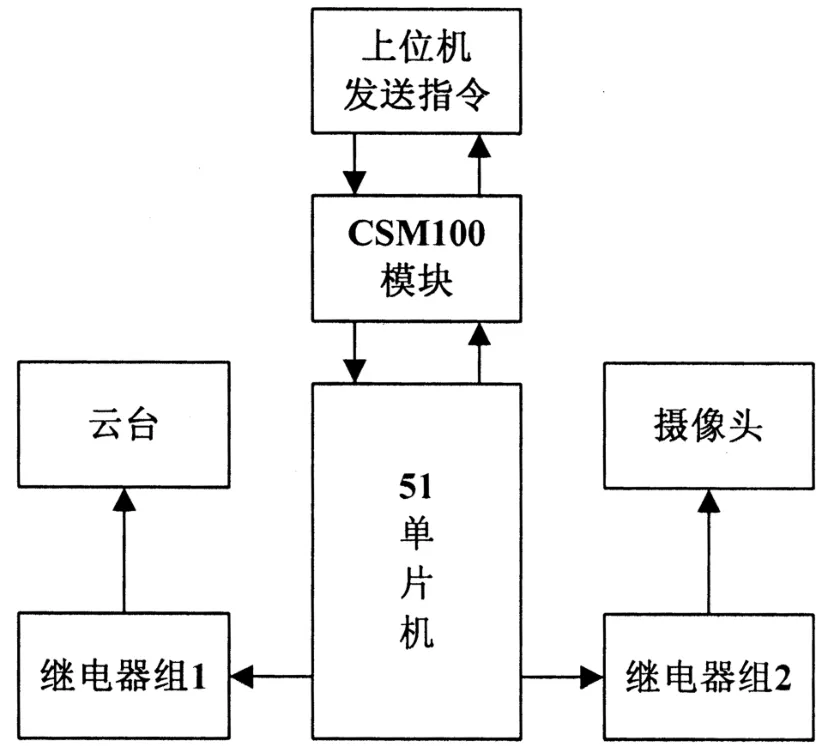
图1 作品结构与原理图
2 硬件部分
本设计主要有三部分组成,主电路控制部分,云台控制部分,摄像头控制部分。
2.1 主电路
主电路电源部分如图2示。
由直流24 V的电源转为三部分[3]:通过逆变器,变成24 V的交流电,最后给云台部分供电;通过芯片7815变成12 V的直流电,给摄像头供电;通过芯片7805变成5 V的直流电,给云台和摄像头的继电器供电。同时还设计了电源短路保护电路如图3所示:c5,c6,c7为104F;c11,c12为1μF电解电容。

图3 电源保护电路
主电路控制部分如图4所示,采用89s51单片机,该单片机最小系统时钟晶振12 MHz,还包括按键复位电路,上位机通讯模块采用can模块csm100,硬件原理图P2口采用一组8位拨码开关实现连通与断开。
2.2 云台部分
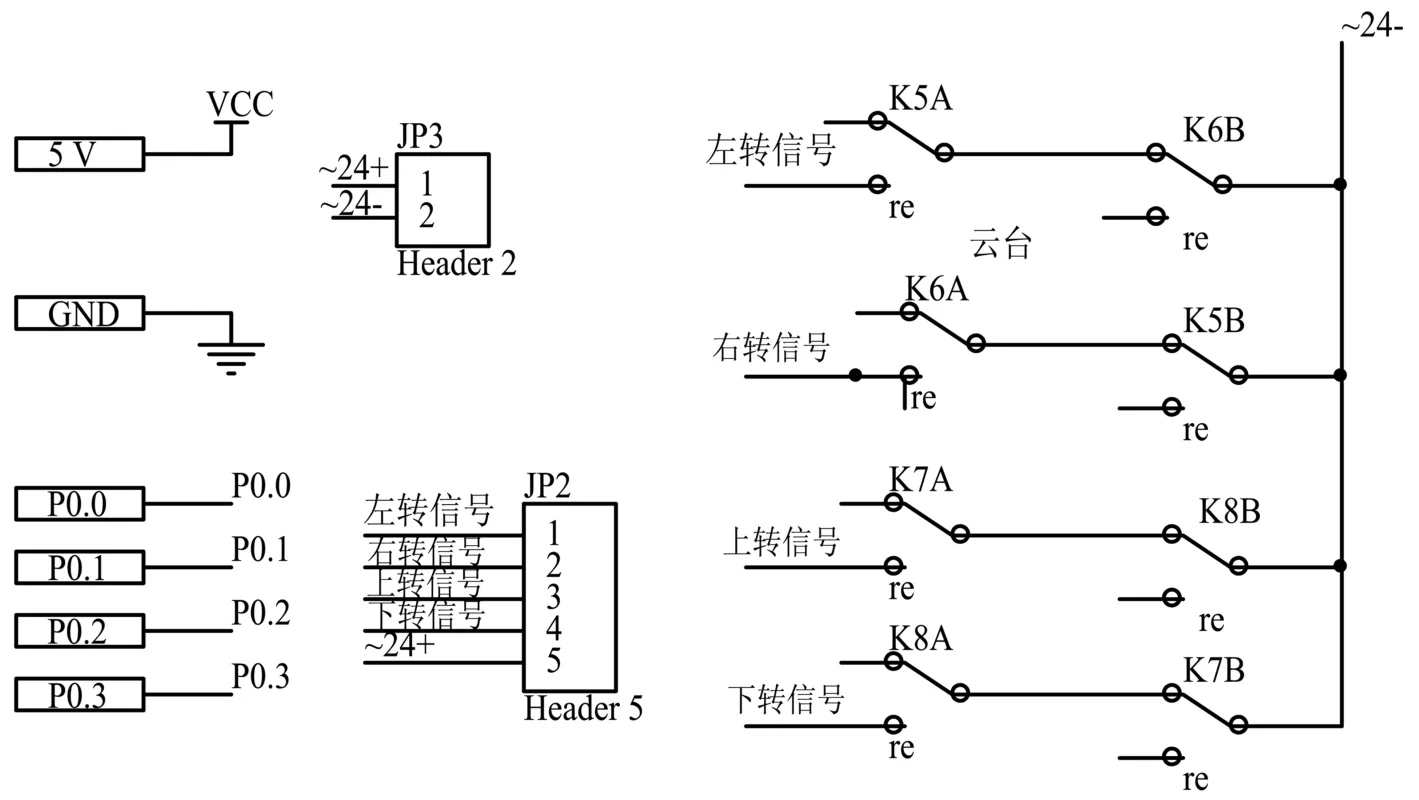
云台驱动电路如图5示。
(左转)K5继电器:只有在P0.0给高电平(K5常开触头闭合),P0.1给低电平(K6常闭触头闭合)时,云台左转。
(右转) K6继电器:只有在P0.1给高电平(K6常开触头闭合),P0.0给低电平(K5继电器常闭触头闭合)时,云台右转。
(上转)K7继电器:只有在P0.2给高电平(K7常开触头闭合),P0.3给低电平(K8常闭触头闭合)时,云台上转。
(下转)K8继电器:只有在P0.3给高电平(K8常开触头闭合),P0.2给低电平(K7继电器常闭触头闭合)时,云台下转。
云台控制电路如图6示,由上位机发送指令信号,控制所在电磁继电器吸合与常态。
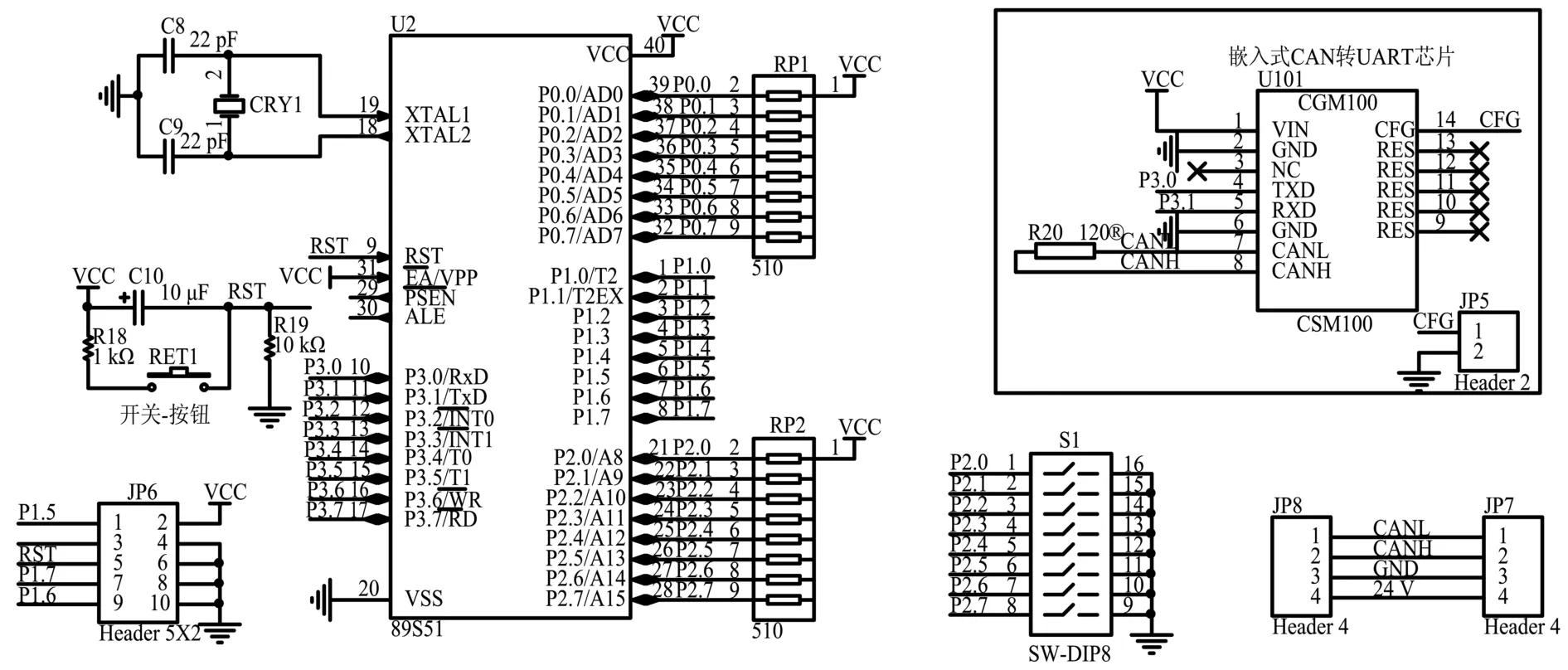
图4 主控制电路

图5 云台驱动电路
2.3 摄像头部分
摄像头驱动电路如图7示。
(倍率主)K1继电器:用来控制倍率指令的通断。当P0.4给高电平时,继电器常开触头闭合,指令可以发送出去;当P0.4给低电平时,继电器常闭触头闭合,指令不能发送出去。
(倍率副)K2继电器:当P0.5给高电平时,供给12 V直流电,倍率增大;当P0.5给低电平时,供给-12 V直流电,倍率减小。
摄像头控制电路如图8示:由上位机发送指令信号,控制所在主倍率和副倍率电磁继电器吸合与常态。
3 软件部分
由KEIL2为51单片机编程,程序模块流程图9如下:程序分为主程序,程序初始化子程序;指令操作子程序。主程序接收指令并且判断指令类别,最后执行指令对应的操作。程序初始化子程序为设定允许接收;设定定时中断初始值,指令操作子程序根据指令码执行所在程序段使相应的继电器坐出动作。
51单片机对上位机发出的指令代码进行处理,判断执行控制指令,使相应的继电器工作,从而使云台中两个电机实现上下左右转及摄像头倍率的调节。
云台的控制指令:
云台上转指令:05 01 C0 40 00 00 00 11
云台下转指令:05 01 C0 80 00 00 00 11
云台左转指令:05 01 C0 10 00 00 00 11
云台右转指令:05 01 C0 20 00 00 00 11
摄像头控制指令:
倍率放大指令:05 01 C0 04 00 00 00 11
倍率减小指令 :05 01 C0 08 00 00 00 11
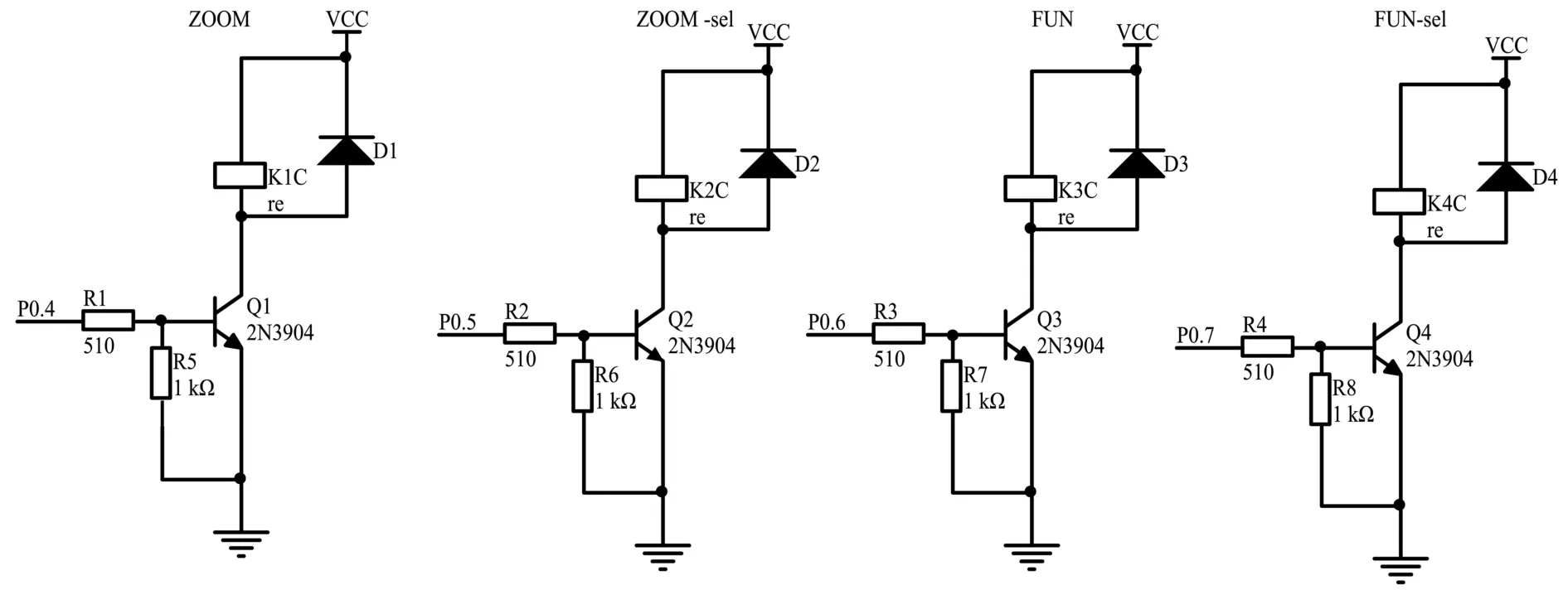
图7 摄像头驱动电路

图8 摄像头控制电路
上位机部分采用串口助手V2.2软件,该软件可对控制板进行串口打开与关闭,发送指令,接收数据,配置信息。配置信息包括串口号、波特率、校验位、数据位、停止位,配置发送与接收数据格式等信息。
上位机通过串口与控制板连接好后,打开串口助手设置串口号,十六进制显示和发送;设置波特率9 600 bit/s;从发送字符和数据窗口可以向控制板发送指令。
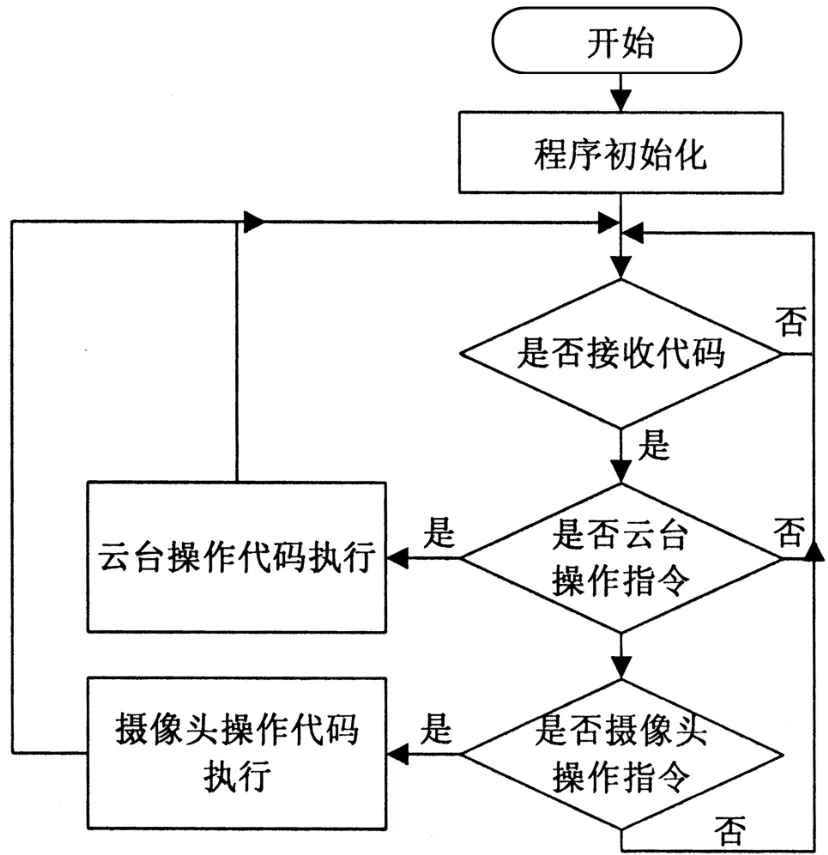
图9 程序流程图
4 特色、功能
(1)适用于对大范围场所进行扫描监视,可以扩大摄像机的监视范围。可调节摄像头的倍率,使监视更清晰。
(2)云台高速姿态是由两台执行电动机来实现,电动机接受对来自控制器的指令精确地运行进行定位。
(3)在控制指令的作用下,云台上的摄像机既可自动扫描监视区域,也可在监控中心值班人员的操纵下跟踪监视对象。
(4)具有广阔市场前景,广泛适用性,可用性,器件易买、成本适中。
该设计通过上位机(电脑)发出操作指令,经过51单片机处理实现对云台和摄像头的控制。最终实现云台移动,通过摄像头倍率调节来更好监控对象。
5 测试方法
硬件确认无误,程序通过KEIL软件编译无误后导入单片机。在接通串口及有关链接线后接通电源,由电脑端输入控制指令,可观察到云台作出相应的动作,以及摄像头倍率的调节效果,信号通过串口返回电脑,用户可清晰看到检测效果。
[1]广州致远电子有限公司.CMS100产品数据说明书[EB/OL]. http:// wenku. baidu. com/ view/ dba62f29b d64783e09122b01.html.
[2]葛广军.基于STC12C5410AD的新型摄像摇臂云台控制器设计[J].河南城建学院学报,2011,20(2):63-66.
[3]王松武,赵旦峰,于蕾,等.常用电路模块设计[M].北京:清华大学出版社,2007.
[4]马斌.单片机原理及应用——C语言程序设计与实现[M].北京:人民邮电出版社,2009.
[5]谭浩强.C程序设计:第三版[M].北京:清华大学出版社,2005.
Yuntai Monitor Controller Design Based on Single Chip Microcomputer
LI Ming-hai,XU Yi-qun
(Jimei University Institute of Marine Engineering,Xiamen361021,China)
PAN/TILT Monitoring Controller mainly consists of main circuit parts,PAN/TILT parts and camera parts of three parts.In this paper,using the single chip processor as the core processing module,use the CAN module to transmit data,the user on the PC via a serial port assistant sends serial data control yuntai monitor action,at the same time receive feedback controller data information.By 51 single chip microcomputer to control the order processing,four relay so as to realize the up and down or so of yuntai rotation.Control the size of the other two relay to realize camera ratio adjustment.Sending and receiving data through RS232.
Single Chip Microcomputer;PAN/TILT;camera;relay
TP273
A
1009-9492(2014)09-0104-04
10.3969/j.issn.1009-9492.2014.09.028
李明海,男,1987年生,福建人,硕士研究生。研究领域:轮机工程。
徐轶群,男,1963年生,硕士,教授。研究领域:轮机工程。 (编辑:向 飞)
2014-03-26
猜你喜欢
现代装饰(2022年6期)2022-12-17
现代装饰(2022年6期)2022-12-17
装备制造技术(2020年11期)2021-01-26
摄影之友(影像视觉)(2020年2期)2021-01-14
安徽电子信息职业技术学院学报(2019年2期)2019-04-26
电子制作(2019年23期)2019-02-23
制造业自动化(2017年2期)2017-03-20
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
地矿测绘(2015年3期)2015-12-22