车载可视倒车装置的设计与实现
2014-02-05 02:02李媛媛童添柱颜孙兵薛鹏冲黄牡丹
实验室研究与探索 2014年2期
李媛媛, 童添柱, 颜孙兵, 薛鹏冲, 黄牡丹
(上海工程技术大学 电子电气工程学院, 上海 201620)
0 引 言
倒车影像和超声波测距系统是汽车泊车或倒车时的安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车、倒车和起动车辆时前后左右探视所引起的困扰,帮助驾驶员扫除视野死角和视线模糊的缺陷,提高驾驶的安全性。
通常,倒车装置由超声波传感器、控制器和显示器(或蜂鸣器)等部分组成,一般采用超声波测距原理,在控制器的控制下,由传感器发射超声波信号。当遇到障碍物时,产生回波信号,传感器接收到回波信号后经控制器进行数据处理、判断出障碍物的位置,由显示器显示距离并发出其他警示信号,得到及时警示,从而使驾驶者倒车时做到心中有数,使倒车变得更轻松。
近些年,随着技术发展和用户需求的变化,倒车控制器经过五代的发展。第一代:倒车时通过喇叭提醒。从某种意义上说,它对司机并没有直接的帮助,不是真正的倒车雷达。价格便宜,基本属于淘汰产品。第二代:用蜂鸣器不同声音提示驾驶员。这是车载倒车系统的真正开始。但没有语音提示,也没有距离显示,虽然司机知道有障碍物,但不能确定障碍物离车有多远,对驾驶员帮助不大。第三代:数码波段显示具体距离或者距离范围。把数码和波段组合在一起,比较实用,但安装在车内不太美观。第四代:液晶荧屏动态显示。这一代产品有质的飞跃,特别是屏幕显示开始出现动态显示系统。不过液晶显示器外观虽精巧,但灵敏度较高,抗干扰能力不强,所以误报也较多。第五代:魔幻镜倒车雷达。结合了前几代产品的优点,采用了最新仿生超声雷达技术,配以高速电脑控制,可全天候准确地测知2 m以内的障碍物,能以不同等级的声音提醒驾驶员,但该产品缺乏可视化的显示,不能直观地告知驾驶员车后障碍物的具体形状。
因此,本文提出开发下一代车载倒车装置,即能够将影音系统整合在一起的产品,该车载可视倒车装置利用单片机技术,通过摄像头模块进行车后障碍物图像的采集,并通过单片机处理之后在TFT-LCD薄膜晶体管型液晶显示屏上显示,使驾驶员能更清晰的看清障碍物图像,同时通过超声波测距模块进行距离监测,根据车与障碍物的距离进行蜂鸣器预警,通过该可视倒车装置能使倒车安全得到更好的保障。
1 基本原理及设计思路
1.1 基本工作原理
车载倒车装置通过传感器和摄像头感知车辆周围的物体,如图1所示。当传感器感应到障碍物时摄像头也将障碍物摄入视频,同时传感器进行测距,保证驾驶员在看到障碍物的同时也能迅速掌握障碍物距离车辆的实际距离,从而更加有效地调整行车状态。
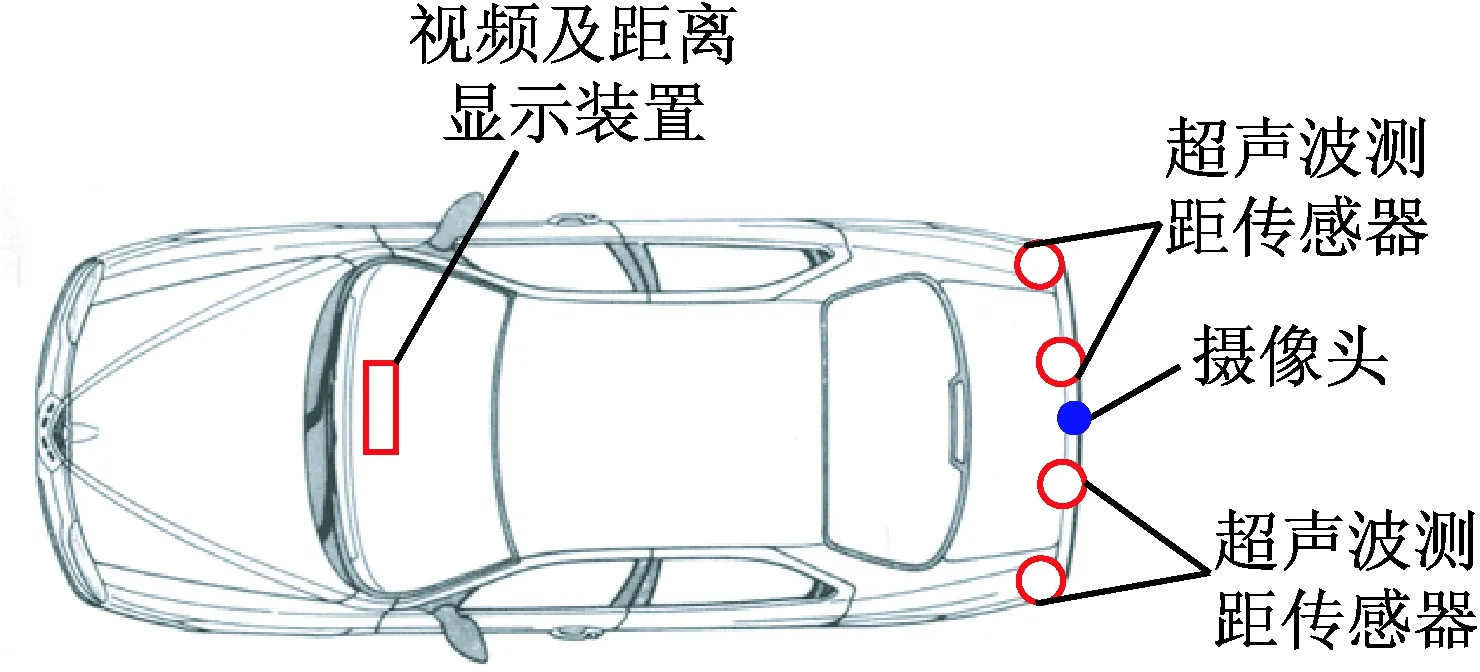
图1 车载倒车装置安装位置示意图
1.2 设计思路
本文设计的车载可视倒车装置主要由单片机处理器、摄像头模块、超声波测距模块、显示模块、报警模块组成,系统总体工作结构如图2所示。摄像头模块把采集到的障碍物图像传送给STM32单片机,经过单片机处理在TFT显示屏实时显示采集到的图像,超声波测距模块将障碍物与车的测距信号通过串口通信输入STM32单片机上,经处理后在5110LCD液晶屏上显示出障碍物与车的距离,并由红蓝绿三盏灯的亮灭来指示障碍物的远近,如果距离非常近,红灯亮,蜂鸣器急促的响,表示有危险;如果距离接近,黄灯亮起,蜂鸣器平缓的响,表示即将进入危险区;如果在安全距离内,绿灯亮且蜂鸣器不发出警报。整个系统通过USB供电。
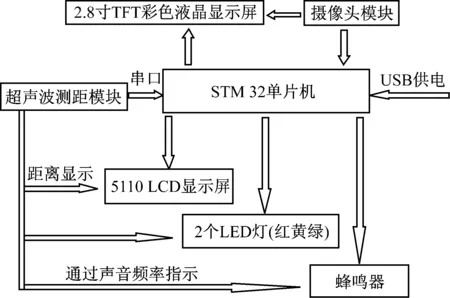
图2 汽车侧方障碍物信号检测模拟图
2 硬件设计
2.1 超声波测距模块
DYP-ME007超声波测距模块可提供2~400 cm的非接触式距离感测功能,测距精度可达到3 mm,模块包括超声波发射器[7-9]、接收器与控制电路。其基本工作原理如下(实物图见图3)。
(1) 用IO口TRIG触发测距,给至少10 μm的高电平信号。
(2) 模块自动发送8个40 kHz的方波,自动检测是否有信号返回。
若有信号返回,通过IO口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间,其公式如下:


图3 超声波测距传感器
2.2 STM 32 单片机
本文单片机在选择上考虑了需求,功耗、价格、稳定性和开发难易程度等因素,采用的单片机型号为STM32F1032ET6,如图4所示。
本文主控单片机在系统中的作用有:
(1) 控制超声波发射电路在固定的发射时段内发射超声波,在接收时段内停止发射超声波。
(2) 控制超声波接收电路在接收时间段内检测超声波,并接收回波信号。
(3) 通过超声波接收电路接收的回波信号来计算超声波在空气中传播所需要的渡越时间,通常,是通过芯片内部定时器的计时功能完成的。
图4 STM 32 单片机
(4) 读取摄像头的图像并显示在TFT液晶屏上。
(5) 在显示模块上显示所测到的距离值。
(6) 控制蜂鸣器及LED灯,根据距离进行报警。
2.3 CF7670C摄像头模块
本文采用的摄像头模块为CF7670C-V2模块,视频采集能力强,响应速度快,低功耗,其性能特点如下:
(1) 带380 kB 大容量的FIFO AL422B,非常适合慢速MCU直接通过I/O采集图象数据。
(2) 带24 MHz有源晶振。
(3) 带OV7670必须的2.8 V 稳压LDO。
(4) 单工作电源3.3 V(+/-0.1 V) ,工作温度0~50℃。
(5) 镜头为全玻璃镜片,镜头(含座)为镁铝合金材料,镜头焦距3.6 mm, 650 nm波段。
(6) PCB为黑色FR-4 优质沉金板,有效防止PCB漏光问题。
2.4 2.8寸TFT彩屏触摸模块
显示屏为2.8寸TFT彩屏触摸屏,支持SD卡,支持DATAFLASH(可以做字库),支持16位/8位模式。其默认i8080 16位并行接口,可选8位并行接口方式。转接板上R7开路是选择16位模式,R7短路时选择8位模式。
2.5 系统设计的硬件电路版
本系统以单片机为控制核心,通过缜密的设计最后把所有模块集成在一块电路板上,能够更好地进行后续开发和大批量生产。如图5所示,倒车影像和超声波测距系统主线路板的3D模拟图像,如图6所示。
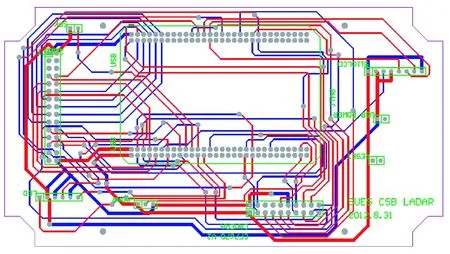
图5 倒车影像和超声波测距系统主线路图
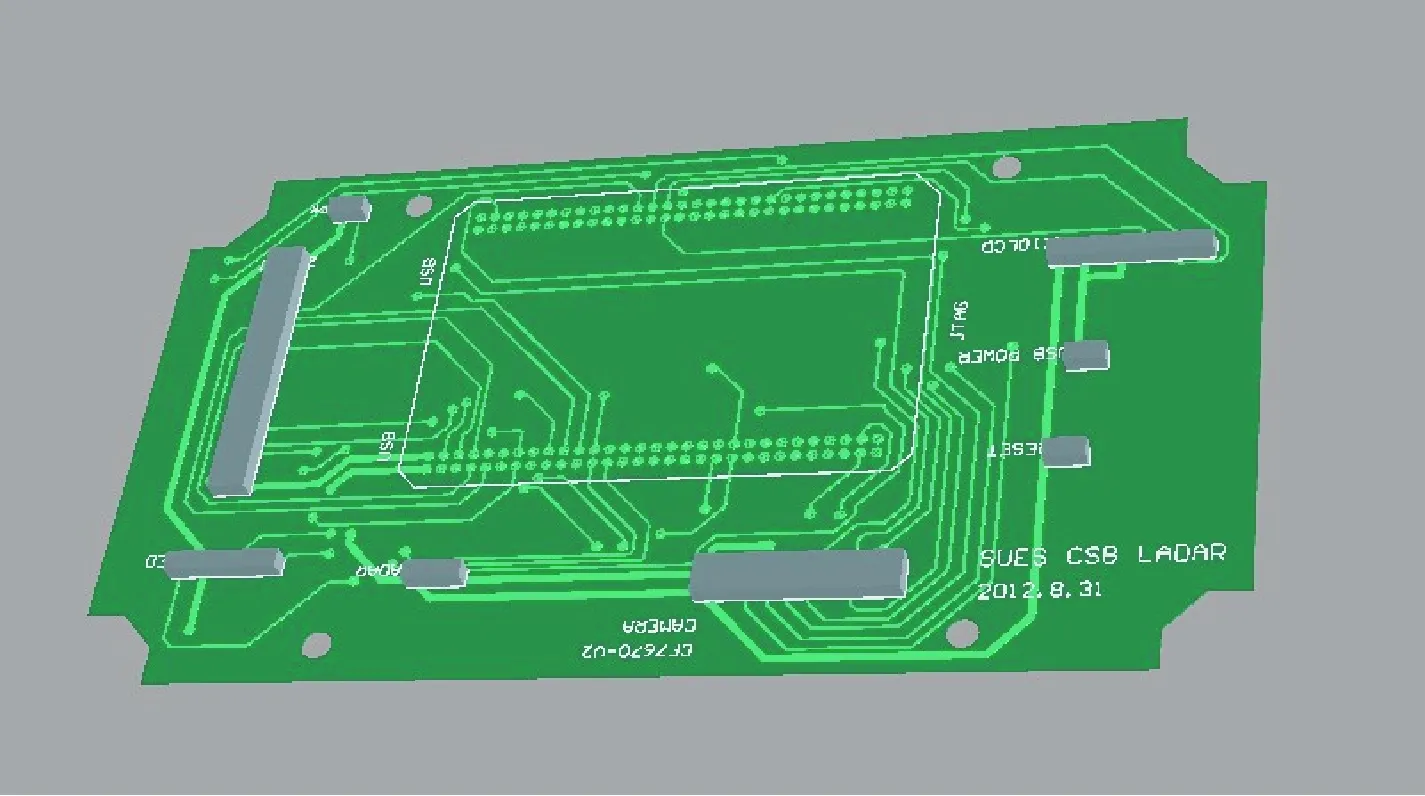
图6 倒车影像和超声波测距系统主线路板(3D模拟图像)
3 软件程序调试
基本流程图如图7所示。
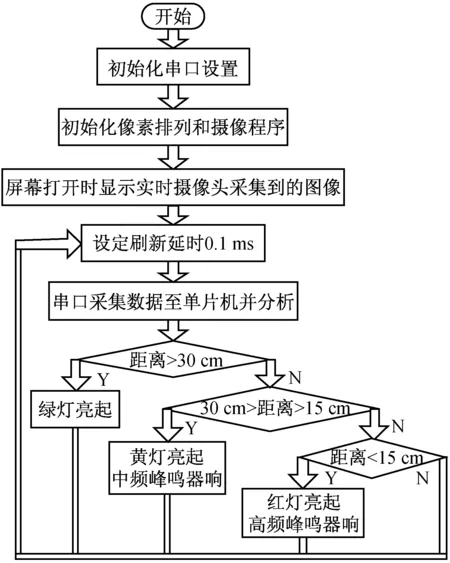
图7 程序基本流程图
其中部分主程序如下:
int main(void)
{
ifdef DEBUG
debug();
endif
/* Intialize the STM32 SYSTEM_Init */
SYSTEM_Init();
LCD_write_english_string(5,66+16,".....2102
BSC SEUS",0Xf800,0X0000);
//LCD_write_english_string(5,66,"SUES CAOSHENGBO 2012",0Xf800,0X0000);
kkk=LCD_ReadID();
FIFO_Set_GPIO_Config();
FIFO_GPIO_INPUT();
FIFO_CS_L();
FIFO_WE_H();
Delay(500);
while(1!=Sensor_init())//初始化CMOS Sensor
{
}
LCD_write_english_string(5,66+16,"OK........2102 BSC SEUS",0Xf800,0X0000);
Sensor_EXTI_Config();
Sensor_Interrupts_Config();
bn=0;
////////////////////////////////////////
FIFO_RRST_L();
FIFO_RD_L();
FIFO_RD_H();
FIFO_RD_L();
FIFO_RRST_H();
FIFO_RD_H();
////////////////////////////////////////
while(1)
{
Delay(1);
cls();
hanzi1();
hanzi2();
locate(6,1);
printf("-----sues-----");
locate(4,36);
printf("%.2fcm",distanceValue);
if(distanceValue>=0&&distanceValue <15)
{
GPIO_SetBits(GPIO_LED,DS3_PIN); //红灯亮
GPIO_ResetBits(GPIO_LED,DS2_PIN); //黄灯灭
GPIO_ResetBits(GPIO_LED,DS1_PIN); //绿灯灭
GPIO_SetBits(GPIO_BEEPER, BEEPER_PIN); /*开启蜂鸣器*/
Delay(7);
GPIO_ResetBits(GPIO_BEEPER, BEEPER_PIN); /*关闭蜂鸣器*/
}
else if(distanceValue>=15&&distanceValue <30)
{
GPIO_SetBits(GPIO_LED,DS2_PIN); //黄灯亮
GPIO_ResetBits(GPIO_LED,DS3_PIN); //红灯灭
GPIO_ResetBits(GPIO_LED,DS1_PIN); //绿灯灭
GPIO_SetBits(GPIO_BEEPER, BEEPER_PIN); /*开启蜂鸣器*/
Delay(10);
GPIO_ResetBits(GPIO_BEEPER, BEEPER_PIN); /*关闭蜂鸣器*/
}
else if(distanceValue>=30&&distanceValue <1000)
{
GPIO_SetBits(GPIO_LED,DS1_PIN); //绿灯亮
GPIO_ResetBits(GPIO_LED,DS2_PIN); //黄灯灭
GPIO_ResetBits(GPIO_LED,DS3_PIN); //红灯灭
GPIO_ResetBits(GPIO_BEEPER, BEEPER_PIN); /*蜂鸣器*/}
4 系统总体调试及测试
该装置实物图如图8所示,本系统采用模块化集成设计,因此系统所搭载的外形十分小巧,外观设计简洁,可视化程度高,可用性很强,系统下方配有4个可移动轮来更仿真地模拟汽车倒车的整个过程。

图8 倒车影像和超声波测距装置实物图
实物测试过程如图9所示,2.8寸TFT彩色液晶屏中显示的是障碍物图像, LCD液晶屏上实时显示出与障碍物的距离,此时距离为47.00 cm。

图9 倒车影像和超声波测距装置实物图
此外,由距离的远近控制红蓝绿三盏灯亮灭,如果距离非常近(<20.00 cm),红灯亮,蜂鸣器响起而气促,表示有危险;如果距离接近(20.00~40.00 cm),黄灯亮起,蜂鸣器平缓的响,表示即将进入危险区;如果在安全距离内(>40.00 cm),绿灯亮且蜂鸣器不发出警报。上述距离报警区间可根据实际情况进行调节。其过程分别图10,图11所示。图10所示距离为20.80cm,黄灯亮,蜂鸣器平缓的响,表示即将进入危险区。图11所示距离为4.60 cm,红灯亮,蜂鸣器响起而气促,表示进人了危险距离。

图10 黄灯显示与后方障碍物距离即将进入危险区

图11 红灯显示与后方障碍物距离已进入危险区
5 结 语
本文设计一款提升倒车安全系数的装置。超声波测距模块DYP-ME007测量传感器与障碍物的距离,并将采集到的信号通过串口形式传输给单片机STM32F1032ET6,再由单片机控制蜂鸣器的响应频率、3个LCD灯的亮灭以及5110LCD距离的实时显示。CF7670C摄像头模块把采集到的图像传送给STM32单片机,经过单片机处理,把图像传输到2.8寸TFT(ICI8328控制器)上显示出来。经测试,该装置性能良好,性价比高,具有实际应用的价值。
[1] 苑 洁, 常太华. 基于STM32单片机的高精度超声波测距系统的设计[J].电子设计工程, 2011,19(15):76-82.
Yuan Jie, Chang Tai-hua.Design of ultrasonic distance measurement system based on STM32 microprocessor[J].Electronic Design Engineering,2011,19(15):76-82.
[2] CARULLO A,PARVIS M.An ultrasonic sensor for distance measurement in automotive applications[M].IEEE, 2001:232-234.
[3] 鞠永胜. 基于嵌入式系统汽车倒车雷达的设计与实现[D]. 济南:山东大学,2010:20-25.
[4] 杨明发.高性价比倒车雷达的研究[J]. 机电技术, 2008,13(1):30-31.
Yang Ming-fa. The research of cost-effective reversing radar system[J].Mechanical and Electrical Technology,2008,13(1):30-31.
[5] 刘洪恩. 汽车倒车防撞超声波雷达的设计[J]. 仪表技术,2004,15(4):55-60.
Liu Hong-en.Design of ultrasonic preventing collision radar for auto reversing[J].Instrumentation Technology,2008,15(4):55-60.
[6] 杨兴明, 贾保柱, 万 莉,等.一种新的倒车雷达系统的设计[J]. 大气与环境学学报,2008,19(2):3-12.
Yang Xing-ming, Jia Bao-zhu, Wan-li.A novel design on reverse radar system[J].Journal of Atmospheric and Environmental Optics,2008,19(2):3-12.
[7] 陈黎敏.传感器技术及其应用[M].北京:机械工业出版社,2010:128-134.
[8] 朱爱红,朱宁文.基于AT89C2051的超声波测距系统[J].信息技术与信息化,2006,32(5):42-44.
Zhu Ai-hong, Zhu Ning-wen.Ultrasonic ranging system based on AT89C2051[J].Information Technology and Informatization,2006,32(5):42-44-.
[9] 胡福云.基于单片机的超声波测距仪[J]. 科学咨询(决策管理),2008,11(8):21-23.
Hu Fu-yun.Design of ultrasonic distance measurement based on microprocessor[J]. Policy and Management,2008,11(8):21-23.
[10] 王吉忠,车用单片机系统实验教程[M].北京:中国电力出版社,2009:44-45.
[11] 崔小玲, 侯思祖, 张 璇,等. 基于STM32的智能终端的设计与实现[J].电力系统通信. 2012, 33(235):76-79.
Cui Xiao-ling, Hou Si-zu, Zhang-xuan.Design and implementationof intellignet terminal based on STM 32[J].Telecommunications for Electric Power System,2012,33(235):76-79.
[12] 李良光,张宏群.模拟电子技术[M].北京:清华大学出版社,2011:69-82.
[13] 梁小流,陈炳森,梁建和.基于89S52汽车防撞雷达系统设计[J]. 机电工程技术,2011,10(4):49-51.
Liang Xiao-liu, Chen Bing-sen, Liang Jian-he.Design of preventing collision radar based on 89S52[J].Mechanical and Electrical Engineering Technology,2011,10(4):49-51.
[14] 朱 成.基于ARM和FPGA智能视频采集处理系统的应用设计[J].桂林理工大学学报,2011,31(4):604-609.
Zhu Cheng.Application of untellignet video capturing system based on ARM and FPGA[J].Journal of Guilin University of Technology,2011,31(4):604-609.
[15] 陆冬妹. 基于温度补偿的超声波倒车测距系统的设计[J].齐齐哈尔大学学报,2011,27(2):26-29.
Lu Dong-mei. The design of ultrasonic back-up ranging system is based on temperature compensation[J].Journal of QIQIHAER University,2011,27(2):26-29.
·名人名言·
大学的荣誉,不在它的校舍与人数;而在于它一代一代人的质量。
——柯南特
猜你喜欢
疯狂英语·初中天地(2022年9期)2022-08-29
电脑报(2020年12期)2020-06-30
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
科学(2020年3期)2020-01-06
时代农机(2019年2期)2019-04-24
电子制作(2017年7期)2017-06-05
汽车维护与修理(2016年10期)2016-07-10
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
太空探索(2014年1期)2014-07-10