
脉冲激光雷达变频测距技术理论研究
2014-01-23 02:40邓全,马敏,李丽
激光与红外 2014年6期
邓 全,马 敏,李 丽
(中国电子科技集团公司第二十七研究所,河南郑州450047)
1 前言
激光雷达(light detection and ranging,Lidar)是一种可以精确、快速地获取目标三维空间信息的主动探测设备,其主要作用是探测、识别、跟踪目标。目前,激光雷达以其分辨率高、抗干扰能力强、隐蔽性好等优点,在精密测量、侦察监视、火控制导等领域有着广泛的应用。
距离信息是激光雷达获取目标三维空间(ρ、α、β)的重要参数之一。因此,激光雷达的关键任务之一就是精确、快速地测量脉冲飞行时间t并解算出目标距离。激光测距从技术角度可以分为三类:脉冲激光测距、调幅连续波激光测距和调频连续波激光测距[1]。相比其他两种方式,脉冲激光测距以其峰值功率高、探测距离远、结构简单并且对光源相干性要求低等优点获得广泛的应用。但是,传统的脉冲测距系统精度低,一般为米级,难以适应某些领域对高精度距离信息的需求。
在卫星编队飞行、星间导航、航天器交会对接等领域对测距精度要求很高(精度要求为厘米甚至毫米量级)。传统的脉冲测距系统无法该满足要求,虽然可以采用多次测量求取平均值的方式提高测距精度,但又存在测量时间长、数据率低的问题。本文正是针对上述现实需求,提出了脉冲激光雷达变频测距的新思路,通过理论探讨,为脉冲激光雷达高速、高精度测距提供依据。
2 变频测距的理论基础
2.1 脉冲测距原理及误差分析
脉冲激光测距原理是在测距点向被测目标发射一束窄而强的激光脉冲,光脉冲经目标反射后被测距系统接收机接收,设光脉冲从发射点到被测目标间来回一次所经历的时间间隔为t,则测距点与被测目标之间的距离R为:

式中,R为目标距离;t为光脉冲往返时间;c为光速;n为计数器计数结果;f为计数时钟频率。对式(1)两端取微分,得:

由式(2)可见,影响脉冲法测距精度的主要因素为:由于大气折射率变化引起的光速误差、时钟频率误差以及测量计数误差[2]。其中,第1项误差可以采用测量环境参数来降低;第2项误差可以通过选用高精确度和稳定度的时钟源来减小(高精度的晶振频率稳定度小于5×10-6);第3项计数误差是时间间隔测量的主要误差源,直接影响着测距误差的大小,所以时间间隔测量精度基本决定了脉冲激光测距系统的精度。
目前,实现脉冲测距时间间隔测量的方法主要有模拟法、数字法和数字插入法[3]。相对其他两种方法,数字插入法的时间间隔测量精度最高。在数字插入法中,延迟线插入法(Delay-line,DL)是利用信号在延迟线上通过CMOS门时的固定时延来实现时间间隔精确测量的,具有测量范围大、线性好、测量精度高以及测量速度快的优点,综合性能最好[4-5]。在高精度测距领域,业界大都采用了德国ACAM公司的TDC(Time-to-Digital Converter)系列芯片。该芯片正是采用了延迟线插入技术,其测时精度可以达到百皮秒量级[4-5]。
2.2 变频测距原理
变频测距技术是在脉冲激光测距基本原理的基础上,运用时序控制、数据处理的手段,通过多周期时间间隔测量的方法实现高精度距离测量的技术。它又可分为主动变频和被动变频两类。
2.2.1 主动变频测距
主动变频测距是在脉冲激光定频测距的基础上演变而来的。当前,脉冲激光定频测距技术已经十分成熟,定频脉冲测距系统框图如图1所示。
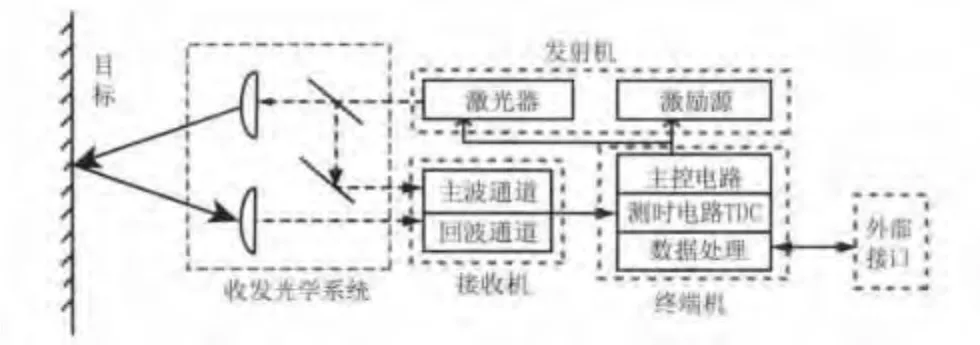
图1 定频脉冲测距系统框图
定频脉冲测距的过程为:激光发射机在终端机主控电路的控制下,以固定频率向目标发射激光脉冲,同时光学系统进行主波采样确定发射时刻,开启测时电路TDC计时。探测器接收被目标反射回的激光信号,经放大、降噪处理后,在接收通道生成回波信号,停止TDC计时。测时电路TDC模块测量起止信号的时间间隔t,经数据转换、处理即可得到目标的距离信息。为提高精度,常采用N次测量后取平均值的处理方式,但是测量时间也相应增加了N倍。
定频测距的主、回波时序如图2(a)所示。图2(a)中T1为固定测量周期,t1为单次测量时延,t2为本周期内的数据处理及空闲等待时间。从图2(a)可见,随着距离由远及近,t2的空闲等待时间会越来越长。为了充分利用t2的空闲等待时间,可以在满足数据处理及外围驱动电路响应时间的前提下,根据距离的远近实施测量周期的主动变频。这就是主动变频测距的技术思路,其时序如图2(b)。

图2 定频与主动变频测距时序图
在图2(b)中,测量周期T1'不再是固定频率,而会随着距离由远及近而由长变短,即测距频率得到提高;t1仍为测量主、回波的时延;t2'仍为一个周期内的数据处理及空闲等待时间。图2中t2'相对t2已经显著变小,由于每周期内数据处理时间恒定,意味着系统空闲等待时间变少。因此,主动变频测距技术有效利用了系统周期内的空闲等待时间。在相同时间内,主动变频测距可以提高距离测量的频率,从而增加距离测量的次数N。由统计理论可知,N次测量取平均值可以使测量精度相对单次测距提高倍[6]。因此,主动变频测距与定频测距相比,可以增加测量次数N值得到更多测量数据,经数据处理即可得到更高的测距精度。
目前,在许多高精度测距应用领域,距离测量的动态范围大,测距精度常与距离相关。如某系统中,数据刷新率为500 Hz(2 ms),测距范围20 km~0.8 m,对应测距时间为 133.33 μs~ 5.33 ns,距离精度要求为(3 σ值):
如果系统采用5 kHz(200 μs)定频测距方式,在500 Hz(2000 μs)数据率条件下,可以测量10次,求取平均值则测距精度相比单次测距提高。对于远距离而言,该方法可以满足精度要求。但对于近距离如150 m以内,对应测量时间不大于1 μs,除去必要的数据处理和驱动电路的响应时间外(12 μs左右),大部分时间处于空闲等待状态,且不能有效提高测距精度。相反,如果采用主动变频测距技术,以距离为变频依据,在不小于1000 m时,频率设置为5 kHz(200 μs);在小于1000 m时,频率设置为 50 kHz(20 μs),在同样的测量时间 2000 μs(数据率500 Hz)内,可以测量100次,精度相比定频单次测距可提高10倍,相比定频10次测距求平均值法可提高倍。
2.2.2 被动变频测距
主动变频测距虽然可以在一定程度上提高精度,但由于主动变频测距每个测量周期仍需要进行一次数据读取、存储、处理的过程,故图2(b)中的t2'没有得到更彻底地减少。如果采用多周期连续测量的方法,则只需进行一次数据处理,在节约测量时间的同时,还可以再次提高变频测距的测量次数N。这就是被动变频测距研究的主要内容。
被动变频测距技术(国内也有学者称之为自触发脉冲测距[7-8])的主要思路是利用激光接收单元的输出信号再次触发激光发射。其完整的过程为:激光发射机向目标发射激光脉冲,经主波采样启动TDC计时;激光接收单元接收到激光脉冲之后,并不立即关闭TDC计时,经固定延时后,再次去触发激光发射单元产生下一个激光脉冲。这样发射→接收→延时→再次发射就形成了周期振荡信号T,经过多个周期后再关闭TDC计时。很显然,目标距离越远,激光从发射到接收所经历的时间越长,在延时一定的情况下信号的周期越长,计数值越大;距离近则周期短、计数值小。可见TDC计数周期的大小反映了距离的远近。测量多个周期后,经解算就可以得到激光脉冲的飞行时间,从而可计算出距离。被动变频测距的时序如图3所示。
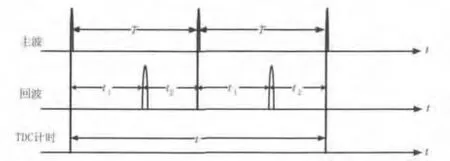
图3 被动变频测距时序图
在图3中,待测量为主、回波时延t1,回波再次触发主波的固定时延为t2,TDC测时电路测量N个周期的时延为t。设TDC提供的时标频率为f,通过测量N个周期的计数,光走过的总路程为s,并结合式(1),有:

则:

式中,d为光的单次单程距离;n为测量时间t内的计数器值;n2为固定时延t2内的计数器值。
被动变频测距技术的理想模型是t2=0,即接收到回波信号后立即触发主波。但在实际应用中,当距离比较近时,例如测量距离为1.5 m,此时振荡回路频率将高达100 MHz。目前,测距用激光器的发射重频无法达到这个量级(半导体激光器重频一般为10 kHz,光纤激光器一般为100 kHz),而且对于激励源驱动放大电路响应速度要求太高,难以达到。因此,被动变频测距中必须人为地加入固定延时,以适应外围电路能够响应的最高频率。
首先,分析被动变频测距技术的高精度测距优势。在图3中做如下假设:设一次变频测量周期为Tr,测量次数为Nr,而TDC提供的时标脉冲周期为T0(即测时分辨率,),完成测量时的计数个数为N0,可以得到:

对式(5)两端求导,可得:

由于测量次数Nr为常量,故:
ΔNr=0;ΔN0=±1;而T0可由TDC芯片精确地给出,故:

则式(6)可化简为:

设系统要求的距离精度为Δd,则根据式(1),Tr的测量精度必须达到:

由式(9)并结合ΔN0=±1可得:

由式(9)可以看出,在测时分辨率T0一定时,随着测量次数Nr的增大ΔTr必然减小,即测量精度得到了提高。式(10)是系统设计时,根据系统的距离精度要求来确定多周期测量次数的。
被动变频测距的另一突出优点是高速。如前所述,定频测距及主动变频测距技术为提高测量精度,在无法提高计数频率的情况下,常采取多次测量求平均值的方法。虽然N次测量取平均值可以使测量精度相对单次测距提高倍,但测量时间相应增加了N倍[8]。例如TDC_GP1芯片处理一次测量结果的时间约为4.2 μs,如果测量距离为10 m,激光往返一次的时间约为0.067 μs,若按照多次测量取平均值的技术思路则大部分时间浪费在数据处理上了,严重影响了激光测距的连续测量能力。而被动变频测距中,由于是多周期连续测量,N次测量只需进行一次数据处理、存取,在有效减小测量误差的同时,节约了(N-1)次数据处理时间,获取距离测量值的速度更快。
3 变频测距技术的制约因素分析
通过主、被动变频测距技术的理论探讨,可以得出:变频测距的实质是充分利用系统空闲等待时间,通过提高测量频率,进行多周期连续测量,达到高速、高精度测距的目的。因此,主、被动变频测距技术能够在同样的测量时间下,达到更高的测距精度;或者在同样的测量精度要求下,能够有更快的测量速度,从而有效地克服了传统激光测距方法中存在的提高测距精度和缩短测量时间两者之间的矛盾。
但是,变频测距技术也有许多制约因素,系统设计时必须认真考虑:
1)对外围电路重复频率要求高。任何情况下,变频测距的最高频率都必须在外围电路(如激光器、激励源)重频所允许的范围内。因此,总体设计时必须对此进行深入分析、全面考虑。
2)变频测距尤其是被动变频测距,时序控制较为复杂,容易对系统的时序安排造成冲击。变频测距中由于测距频率变化,测距周期不确定,容易造成数据输出与系统时序之间的冲突。因此,如何合理安排测量时序,降低冲突风险是变频测距技术不可回避的难题。
3)被动变频测距技术在公式推导中假定了回波再次触发主波的时延为固定值。但是,根据工程经验,由于激励源驱动电路为模拟电路以及回波脉冲幅度的变化,该时延值并不固定。也就是说,变频测距技术引入了一个新的误差源。因此,从系统的角度如何减小该固定时延的误差,成为被动变频技术能否实现高精度测量的关键。
4)变频测距尤其是被动变频测距,再触发的输入条件是目标回波。因此,它严重依赖于目标特性,应用领域限于目标稳定跟踪状态,或者回波率为100%的固定目标。一旦目标丢失,系统进入搜索捕获状态,则变频测距技术将不再适用。因此,进一步研究定频测距与变频测距的融合技术,使得系统能够适应搜索、捕获、跟踪全过程,是促进变频测距技术实用化、工程化的核心问题。
4 结束语
与激光测距的传统方法相比,本文提出的变频测距技术除具备传统测距所具有的测量距离远、系统结构简单等优点外,还具有测量精度高、测量速度快等优点,能够克服高精度测量和高速测量之间的矛盾。但是,变频测距技术的制约因素也较为突出,限制了该技术的工程化应用。下一步研究工作将以某工程应用为背景(精度要求为5 mm),在本文变频测距技术理论研究的基础上,进行工程化设计,并通过试验为变频测距技术的工程化应用积累数据,推动该项技术的实用化、工程化应用。
[1] CHEN Qiansong,ZHAO Dalong.Study on self-triggering pulsed time-of-flight laser range finding[J].Chinese Journal of Lasers,2004,31(6):745 -747.(in Chinese)陈千颂,赵大龙,等.自触发脉冲飞行时间激光测距技术研究[J].中国激光,2004,31(6):745 -747.
[2] HUANG Zhen,LIU Bin.Research on parallel counting pulsed laser ranging[J].Laser & Infrared,2006,36(6):431 -433.(in Chinese)黄震,刘彬.并行计数法脉冲激光测距的研究[J].激光与红外,2006,36(6):431 -433.
[3] HUO Yujing,CHEN Qiansong.Review on time-of-flight measurement of pulsed laser radar[J].Laser & Infrared,2001,31(3):136 -137.(in Chinese)霍玉晶,陈千颂,等.脉冲激光雷达的时间间隔测量综述[J].激光与红外,2001,31(3):136 -137.
[4] DENG Quan,LI Lei.A high precision time measurement and its application in pulse laser ranging[J].Electronic and Electro-optical Systems,2010,2:11 - 12.(in Chinese)邓全,李磊,等.高精度时间测量技术及其在脉冲激光测距中的应用[J].电光系统,2010,2:11-12.
[5] Germany-ACAM. TDC-GPX Datasheet [EB/OL].May4th,2005.www.acam.de.
[6] LONG Zhuoqun,GONG Xuemei.Measurement of laser multi-cycle distance pulsed flying time[J].Journal of Xi’an Aerotechnical College,2009,27(5):16 - 17.(in Chinese)龙卓群,贡雪梅.激光多周期测距脉冲飞行时间的测量[J].西安航空技术高等专科学校学报,2009,27(5):16-17.
[7] YANG Xiao,SUN Zhao.Study on time-of-flight measurement of self-triggering pulsed laser ranging[J].Electronic Design Engineering,2012,20(1):110 - 111.(in Chinese)杨晓,孙钊.自触发脉冲激光测距飞行时间测量研究[J].电子设计工程,2012,20(1):110 -111.
[8] TONG Minming,ZHANG Zheng.The design of laser ranging system with TDC-GP1[J].Industry and Mine Automation,2006,5:58 -60.(in Chinese)童敏明,张徽.采用TDC-GP1的激光测距系统设计[J].工矿自动化,2006,5:58 -60.
猜你喜欢
科学(2020年3期)2020-01-06
测控技术(2018年6期)2018-11-25
通信电源技术(2018年5期)2018-08-23
制导与引信(2017年3期)2017-11-02
电子制作(2017年7期)2017-06-05
设备管理与维修(2016年7期)2016-04-23
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
太空探索(2014年1期)2014-07-10
自动化博览(2014年4期)2014-02-28
河南科技(2014年23期)2014-02-27
