新一代国际标准RTCM V3.2及其应用
2014-01-16 05:50:29秘金钟谷守周方书山向常淦
导航定位学报 2014年4期
陈 振,王 权,秘金钟,谷守周,方书山,向常淦
(1.中国测绘科学研究院,北京 100830;2.四川省第一测绘工程院,四川 成都 610100)
1 引言
差分全球导航卫星系统(differential global navigation satellite system,DGNSS)由基准站、数据通讯链和流动站(用户)三部分组成[1]。由DGNSS定位原理可知,基准站形成差分改正信息,并利用标准协议将差分改正信息发送给流动站用户[2]。其中数据传输格式是数据通讯链的重要环节,差分定位的精度与差分改正信息的更新速率、数据传输的准确性密切相关,因此,要求数据通讯链传输快速、准确、可靠[3]。
国际海运事业无线电技术委员会标准协议(radio technical commission for martine services,RTCM)是一种普遍采用的数据传输格式,它是由国际海运事业无线电技术委员会提出的,用于制定在差分全球导航定位系统和实时动态操作时使用的标准。
为满足全球导航卫星系统(global navigation satellite system,GNSS)的发展趋势,RTCM先后经历多次格式的改进,目前应用最普遍的是RTCM V3.1标准格式,但为适应欧盟伽利略卫星导航系统(Galileo navigation satellite system,Galileo)和我国北斗卫星导航系统(BeiDou navigation satellite system,BDS)等新系统的发展、已有系统的改造升级(如新L2C和L5信号)以及地区性广域差分增强系统(satellite-based augmentation systems,SBAS)的应用,RTCM V3.2标准格式应运而生,本文就是对RTCM V3.1和RTCM V3.2标准格式进行对比,浅析V3.2版本中更新的内容和格式,讨论RTCM V3.2标准格式的未来应用情况。
2 RTCM发展历程
国际海运事业无线电技术委员会于1983年11月为全球推广运用差分全球定位系统(global positioning system,GPS)业务设立了RTCM 104专门委员会(RTCM special committee NO.104,RTCM SC-104),用于论证提供差分GPS业务的各种方法,并制定各种数据格式标准。到目前为止,RTCM标准格式共经历三个版本,即第一版、第二版和第三版[4]。
2.1 RTCM第一版
RTCM SC-104专门委员会于1985年公布了RTCM V1.0标准格式的建议文件,该版本主要描述了GPS系统差分信息。在早期差分GPS系统应用和服务方面发挥了重要作用。。
2.2 RTCM第二版
RTCM V2.0标准格式于1990年1月颁布,该版本提高了差分改正数的抗差性,增大了可用信息量,差分定位精度由V1.0版本的8~10m提高到了5m,通常可达到2~3m;但该版本的协议主要用于导航服务,只有伪距差分信息,没有载波相位信息。
为了适应载波相位差分GPS的需要,RTCM SC-104专门委员会于1994年公布了RTCM V2.1标准格式,其基本数据格式未变,增加了几个支撑实时动态差分定位(real-time kinematic,RTK)的新信息,即信息18~21。
在1998年又公布了RTCM V2.2标准格式,它增加了支持俄罗斯格洛纳斯卫星导航系统(global navigation satellite system,GLONASS)的差分导航信息,同时在相应的信息中增加了区分GPS卫星和GLONASS卫星的标志。
2001年又发布了RTCM V2.3标准格式,定义了信息23和24(天线参考类型),它的实时动态定位精度优于5 cm[5]。
2.3 RTCM第三版
RTCM V3.0标准格式于2004年公布,该版本提供了包括伪距和载波相位观测值、天线参数和辅助系统参数这些用于支持GPS和GLONASS RTK作业的信息。
2006年10月公布了RTCM V3.1标准格式,该版本新增了GPS网络差分改正信息、GPS星历信息、GLONASS星历信息、用于提供文本信息的统一编码信息以及为经营商预留的用于为特殊用途提供专有服务的一系列信息类型[6]。RTCM V3.1主要是应用于网络RTK环境中,是一种更高效、简洁且容易适用于新环境的数据格式,已经通过了可靠性与实用性测试,出现新的内容只需要修改保留位信息而不会影响已经定义了的数据字段,因此有很强的实用性[7]。
针对RTCM V3.1标准格式,RTCM SC-104专门委员会又提出了五次修正案,改进了信息描述,增加了专有信息、网络RTK残差信息、真实参考站的位置信息(用于虚拟参考站Virtual Reference Station,VRS)、接收机与天线描述信息、处理四分之一周相位切换、GPS与GLONASS FKP技术、GLONASS主辅站技术(master auxiliary concept,MAC)、状态空间差分(state space representation,SSR)信息等。
2013年2月公布了最新版本RTCM V3.2标准格式,新定义了多信号信息(multiple signal message,MSM)和GLONASS偏差信息;同年7月提出了修正案RTCM V3.2.A.1,新增了BDS MSM和Galileo F/NAV卫星星历数据。
3 RTCM V3.2标准格式的更新
为了适应新系统(尤其是BDS与Galileo)的发展、已有系统的改造升级(如新L2C和L5信号)以及地区性广域差分增强系统的应用,在RTCM V3.1标准格式的基础上进行了必要的扩展,得到了最新的RTCM V3.2标准格式,主要包括帧结构、信息类型、数据类型、数据字段和信息。
3.1 帧结构
RTCM V3.2标准格式的帧结构与RTCM V3.1标准格式相同,每帧数据的结构如表1所示。
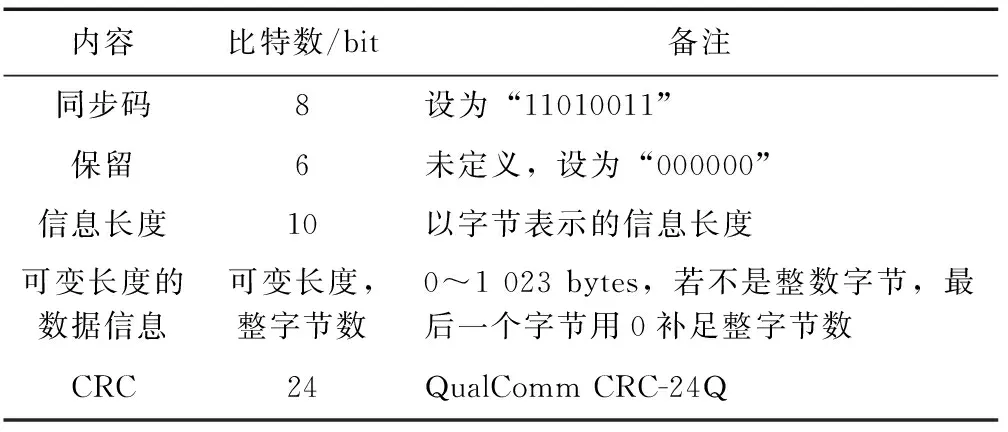
表1 RTCM V3.2标准格式的帧结构
3.2 信息类型的更新
信息类型规定了每帧数据可变长度的数据信息,是RTCM协议传输各种信息的载体,所以信息类型的更新是版本更新的最主要部分,RTCM V3.2标准格式相对于RTCM V3.1标准格式的修订和修正案总结如表2所示。
第三版中的信息类型根据用途被划分为不同的信息组,为有效实现特定服务,服务商需要发送组中的几种信息类型。RTCM V3.1标准格式中已定义信息组包括观测数据、测站坐标、天线描述、网络RTK改正、辅助观测信息和专有信息,新版本不仅在已定义的信息组中补充新的信息类型,同时也定义了新的信息组(接收机与天线描述、转换参数和状态空间差分参数),新版本中各信息组新定义的内容如表3所示。

表2 RTCM V3.2标准格式的修订(3.x)和修正案(A.x)总结
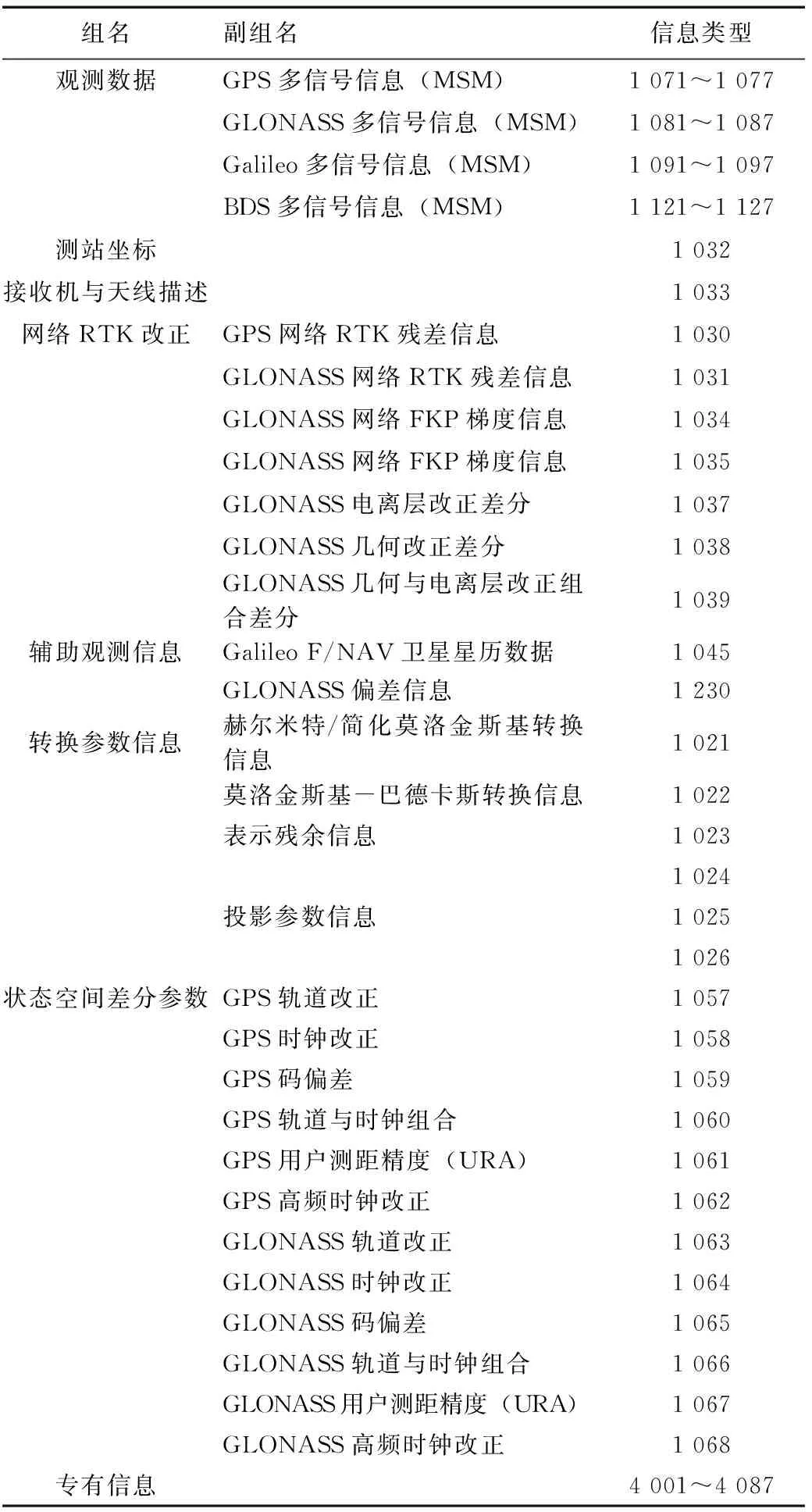
表3 信息组更新
RTCM V3.1与V3.2标准格式都支持GPS、GLONASS以及GPS/GLONASS组合RTK服务,在V3.1版本基础上只能支持7种RTK服务水平(如表4所示),V3.2版本通过定义新信息类型,能够支持20种服务,其中前6种服务完全得到继承,将单一的精密GPS网络RTK服务(V3.1版本中第7种服务)扩展成6种网络RTK服务,同时还实现3种状态空间差分(SSR)服务,1种码差分操作服务、2种不同精度操作服务和2种不同精度数据改正服务,服务商可以按照需求提供基本或者完整的服务[8]。

表4 RTCM V3.1与V3.2版本支持RTK服务对比
3.3 数据字段的更新
数据字段是信息的重要组成部分,每条信息是由若干数据字段按一定格式排列而成,数据字段规定数据字段的范围、分辨率和数据类型。
RTCM V3.1标准格式共定义了142个数据字段(Data Field,简称DF),V3.2版本在原有基础上新定义了285个数据字段,总量达到427个,定义新数据字段的目的是满足描述新信息内容的要求。新定义数据字段主要用于表示坐标转换、网络RTK残差、状态空间差分、GLONASS网络RTK改正、FKP网络RTK改正、多信号信息和GLONASS偏差信息等。
3.4 数据类型的更新
数据类型规定数据的范围,包括位字段、八位字符、补码整数、无符号整数、符号数值整数和统一码UTF-8编码共六种形式的数据类型。
RTCM V3.1标准格式共定义了39种数据类型,RTCM V3.2标准格式中增加定义了长度为8、9、10、15、19、25、26、27、34和35比特的补码整型,2、9、14、26、35和36比特的无符号整型,其他数据类型未进行修改,从而使数据类型达到55种。定义新数据类型是为了描述新定义的数据字段,随着新数据字段数量的增加,数据类型可能会继续增加。
3.5 信息的更新
新定义信息类型的数量较多,在此以多信号信息和真实参考站信息类型为例进行说明,其它信息类型的定义方式与以上两种基本相似。
3.5.1 多信号信息组
多信号信息是为不同卫星系统观测数据提供通用传输格式而定义的,可以分解成压缩信息和完整信息(类似于信息类型1003和1004,或者1011和1012)[9]。由于未来将有更多导航卫星系统被设计使用,新的多信号信息将会被定义,信息类型1070~1229正是为多信号信息预留的。在RTCM V3.2版本中定义了GPS、GLONASS、Galileo和BDS多信号信息,这些信息具有相似的信息类型,如表5所示。

表5 各系统多信号信息类型
注:N=0(GNSS特指GPS);N=1(GNSS特指GLONASS);N=2(GNSS特指Galileo);N=3(GNSS特指BDS)。
多信号信息类型共定义7种,受篇幅所限,对多信号信息类型的比特结构不再赘述,可参考RTCM V3.2协议。
各种导航定位系统的多信号信息具有相同的结构,内部模块排列顺序也基本相同,如表6所示。
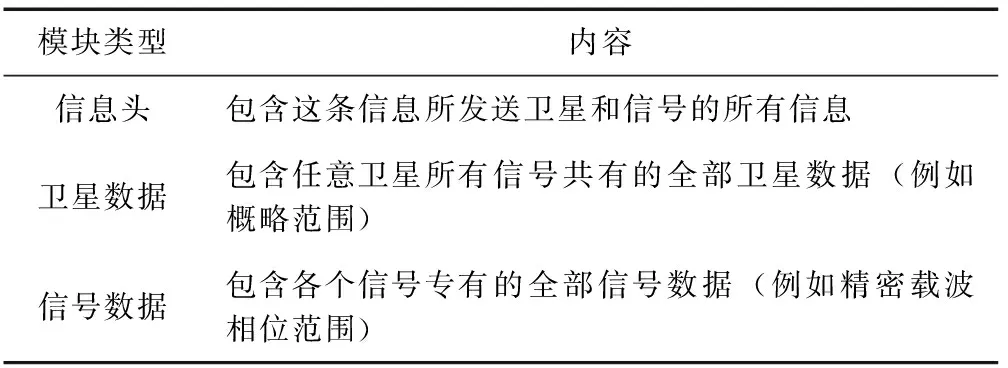
表6 多信号信息内容和各模块排列顺序
所有数据字段不是根据卫星或信号来分组的,而是根据数据类型进行分组。具体就是,如果在一个卫星数据模块中被传送的数据字段不止一个,就将所有可利用卫星的第一个数据模块进行打包,紧接着是第二个,以此类推。相似的,如果传送的信号数据字段不止一个,那就将各可利用卫星与信号组合进行打包,紧接着是第二个数据字段,也对应于各可利用卫星和信号。这种打包的方式就是“内部循环”。
对于多信号信息的不同类型,RTCM V3.2标准格式定义了相同的信息头格式,如表7所示。

表7 多信号信息各信息类型(MSM1—MSM7)信息头的内容
卫星信息的发送是有条件的,只有当卫星标记(DF394)对应值为1时,该卫星的卫星信息才会在MSM中发送。因此,如果卫星标记设为1,每个数据字段将重复Nsat次(利用了内部循环),循环数据的顺序对应于卫星标记中的顺序,Nsat指卫星数量。多信号信息各信息类型的卫星数据内容分别如表8、表9和表10所示。

表8 多信号信息类型MSM1/MSM2/MSM3的卫星数据内容

表9 多信号信息类型MSM4/MSM6的卫星数据内容

表10 多信号信息类型MSM5/MSM7的卫星数据内容
信号信息的发送也是有条件的,只有当单元格标记(DF396)对应值为1时,该信号与卫星组合的信号信息才会在MSM中发送。因此,如果单元格标记设为1,每个数据字段将重复Ncell次(利用了内部循环),循环数据的顺序对应于单元格标记中的顺序,Ncell指信号数据模块的数量。多信号信息各信息类型的信号数据内容如表11至17所示。

表11 多信号信息类型MSM1的信号数据内容

表12 多信号信息类型MSM2的信号数据内容
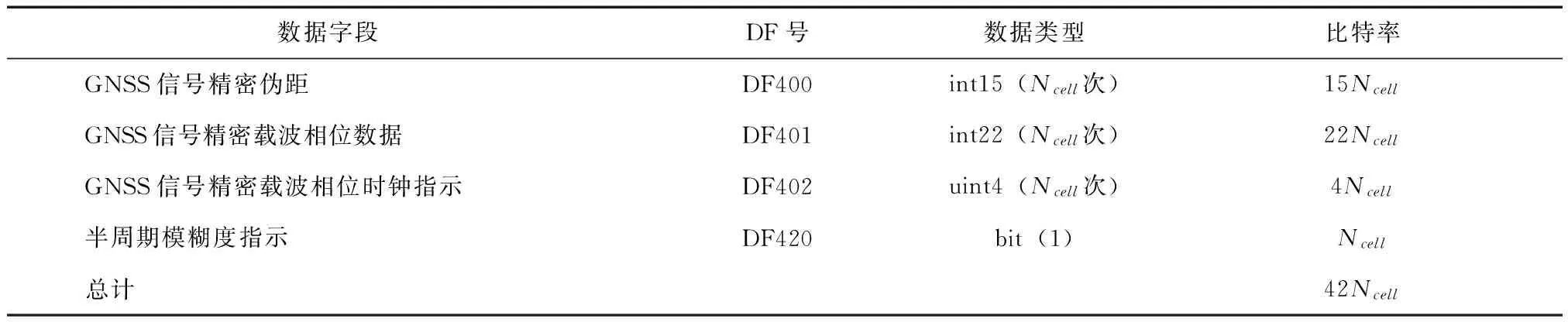
表13 多信号信息类型MSM3的信号数据内容

表14 多信号信息类型MSM4的信号数据内容

表15 多信号信息类型MSM5的信号数据内容

表16 多信号信息类型MSM6的信号数据内容
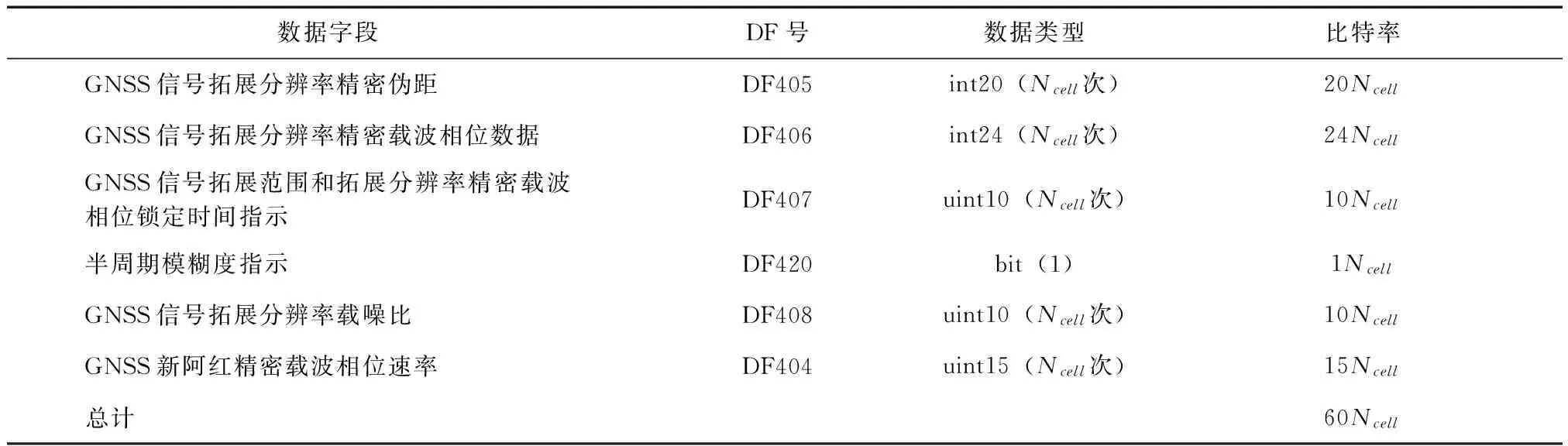
表17 多信号信息类型MSM7的信号数据内容
多信号信息是以某一物理历元来发送,因此,采用多信息指示符(DF393)来表示该历元是否结束(该指示符适用于各种GNSS系统)。当在某一物理历元和某一参考站ID后还有同一种或另一种GNSS系统多信号信息存在时,该指示符被设为1。为有效利用该指示符,解码软件应当了解该数据流中所有可能发送的GNSS信息类型。然而,未来更多导航卫星系统多信号信息将会被定义,裂解所有GNSS信息类型不太现实。由信息头结构可知,在MTxxx1、MTxxx2、MTxxx3、MTxxx4、MTxxx5、MTxxx6、MTxxx7信息中第55个字符代表MSM多信息指示符,这能确保解码软件在不了解新导航卫星系统多信号信息的内容和格式的情况下得到历元结束信息。
3.5.2 真实参考站坐标信息
新定义的真实参考站坐标信息类型1032的内容如表18所示。
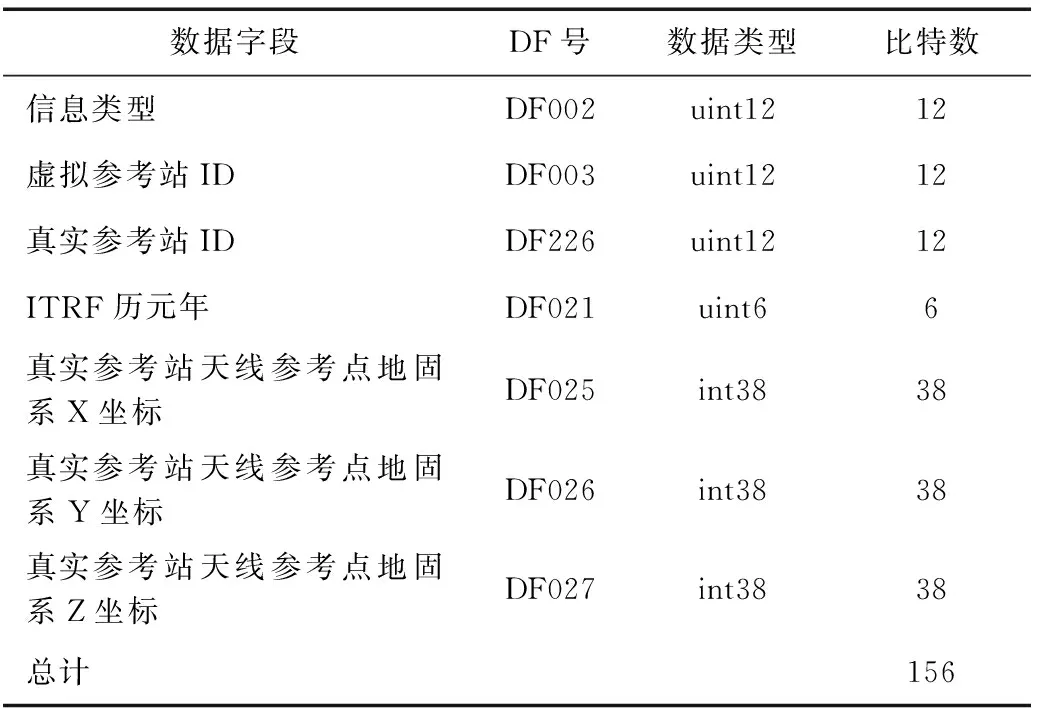
表18 真实参考站坐标信息类型1032的内容
下面是一个信息类型1032(真实参考站坐标信息)的十六进制例子:
D3 00 14 40 80 03 7D 30 02 98 0E DE EF D2 D2
F5 8A B0 94 19 86 F3 30 36 0B 98
此条信息代表的参数是:
虚拟参考站ID:03
真实参考站ID:2003
真实参考站天线参考点地固系X坐标:1 114 104.599 9 m
真实参考站天线参考点地固系Y坐标:-4 850 729.710 8 m
真实参考站天线参考点地固系Z坐标:3 975 521.464 3 m
4 RTCM V3.2标准格式的未来应用
新版本的内容大体可分为RTK、网络RTK、
状态空间差分SSR、辅助GNSS技术等协议,这些功能主要应用于GNSS高精度实时定位领域,符合RTCM SC-104标准发展的主流方向。在未来应用上,RTCM协议应该会将实现区域增强系统格式的修订作为首要目标。
RTCM V3.2标准格式的制定,弥补了此前版本中网络RTK信息的不足,定义了包含GPS、GLONASS、Galileo和BDS的多信号信息组(MSM),增加Galileo和BDS信息,同时伴随着选择可用性政策的撤消,使得支持RTK服务的带宽显著降低,支持现在所有的服务并减少了数据传载量,拓宽了RTCM的应用领域,目前已被广泛应用于海运、内陆交通、工程施工、国土规划、大地测量等各个领域来传输差分GNSS数据[10]。RTCM标准格式已成为卫星导航定位领域芯片制造商、板卡集成商、整机制造商、应用服务提供商、以及用户等在设计研发、生产加工、应用推广等产业链中必须遵守的关键协议之一,虽然是推荐标准,但却是事实上的产业标准。
5 结束语
RTCM第三版本通过对一个参考站或一个参考站网络的描述,定义了支持GPS和GLONASS系统操作的信息格式和技术手段。新版本顾全了开发中的新系统(尤其是BDS和Galileo)的应用、已有系统的完善(如新L2C、L5信号)和星基增强系统的使用,这些更新是为了满足当前和未来差分GNSS技术的需求,使传输的信息更加简洁实用,更好的为在航海、航空、地面交通和科研工作中的应用打下基础,尤其是BDS系统相关协议的制定将会为北斗在国内外GNSS高精度差分定位领域的应用提供标准支撑,从而提供完整、独立、兼容的服务。
[1] 党亚民,秘金钟,成英燕.全球导航卫星系统原理与应用[M].北京:测绘出版社,2007: 136-155.
[2] 张九宴.GPS差分协议及基准站算法研究[D].武汉:武汉大学,2003.
[3] 裴凌,王庆,王慧青.实时DGPS数据通讯模式分析与方案设计[J].电子测量与仪器学报,2005,19(6):98-102.
[4] 刘智敏,林文介,唐卫明.GPS差分协议RTCM电文分析与应用[J].桂林工学院学报,2004,24(2):188-191.
[5] 郭洪涛,任超.差分GPS数据通讯格式RTCM3.0及应用发展[J].全球定位系统,2010(3):63-65.
[6] RTCM10403.1,Standard for Differential Global Navigation Satellite Systems[S].
[7] 朱静然,潘树国,孔丽珍.DGPS数据RTCM3.1介绍及编解码方法[C]//第四届中国卫星导航学术年会(CSNC 2013)论文集.武汉:中国卫星导航学术年会,2013.
[8] RTCM 10403.2,Standard for Differential Global Navigation Satellite Systems[S].
[9] Amendment 1 To RTCM10403.2,Standard for Differential Global Navigation Satellite Systems[S].
[10] 吴海玲,李作虎,刘晖.关于北斗加入RTCM国际标准的总体研究[J].全球定位系统,2014,39(1):27-33.
猜你喜欢
军民两用技术与产品(2021年10期)2021-11-25 14:17:57
新世纪智能(数学备考)(2021年5期)2021-07-28 06:19:46
科学家(2019年3期)2019-08-18 09:47:43
科学与财富(2016年28期)2016-10-14 22:02:34
山东青年(2016年1期)2016-02-28 14:25:25
信息安全研究(2015年3期)2015-02-28 20:17:57
太空探索(2014年1期)2014-07-10 13:41:50
四川生理科学杂志(2014年2期)2014-02-28 14:09:20
当代修辞学(2014年3期)2014-01-21 02:30:44
新东方英语(2014年1期)2014-01-07 19:56:11