卡尔曼滤波在无线信号定位中的应用
2014-01-16 05:50:19张言哲陈国良张俪文汪云甲
导航定位学报 2014年4期
张言哲,陈国良,张俪文,汪云甲,王 坚
(中国矿业大学 环境与测绘学院,江苏 徐州 221116)
1 引言
目前很多应用都是基于位置服务(location-based services,LBS[1])的,为了能够提供可靠、高效的位置服务,对位目标进行实时、准确的定位成为了目前最需要解决的问题。定位分为两种情况:室外定位和室内定位。在室外环境中美国的全球定位系统(global positioning system,GPS)[2]和俄罗斯格洛纳斯卫星导航系统(global navigation satellite system,GLONASS)[3]得到了广泛和成熟地应用,为室外环境中实现LBS提供了很好的技术支持。随着我国的北斗卫星导航系统(BeiDou navigation satellite system,BDS)[4]和欧盟伽利略卫星导航系统(Galileo navigation satellite system,Galileo)[5])的逐步建成和投入使用,以及GPS和GLONASS的升级,使得全球卫星导航系统(global navigation satellite system,GNSS)不断壮大和完善[6]。另外,基于移动通信基站的蜂窝定位技术(如Cell-ID)以实时性好、网络流量耗费较少的特点,也得到广大移动通信用户的青睐[7]。这使得室外定位技术走向成熟和完善。然而,由于GNSS信号和蜂窝信号在室内环境中受到建筑物本身的遮挡以及建筑物内部结构如墙壁、门窗、各种摆设和实时变化的人员走动的影响,使得在室内环境中接收到的信号极其微弱,无法从中获得定位所需的有效信息[8]。
随着无线保真(wireless fidelity,WiFi)网络在城市的普及,使得利用公共WiFi无线信号实现室内定位成为可能。目前WiFi室内定位技术多采用基于接收信号强度(received signal strength indication,RSSI)的方法,该方法可以分为两大类:基于WiFi信号传播模型和基于WiFi信号指纹匹配的定位方法。基于WiFi信号传播模型方法需预先采集待定位区域的每个无线访问接入点(access point,AP)的位置和参数,由于每个AP点的位置无法有效获取使得该方法实施困难。WiFi信号指纹匹配的定位方法无需获取相关参数且部署简单,因此,该方法成为室内定位方法的首选。但是,由于WiFi信号本身的不稳定性使得采用WiFi信号指纹匹配定位方法在连续单点定位时定位结果存在较大的噪声,使得定位结果产生跳动现象。均值滤波是常用的降噪算法,该方法虽然算法简单容易实现,但是不能有效的对WiFi信号指纹匹配定位结果进行去噪处理。本文利用卡尔曼滤波对定位结果进行去噪处理,进而估算用户的位置坐标。试验结果表明,相比常用的均值滤波,卡尔曼滤波算法是鲁棒的,可有效改善WiFi定位精度,使得定位结果快速收敛到真实值附近,进而改善连续单点定位时的跳动问题。
2 WiFi信号指纹定位
2.1 WiFi信号指纹定位原理
WiFi信号指纹定位是基于指纹匹配算法的,该方法不考虑信号的衰减规律,而是通过与参考数据对比来估计物体可能的位置。此方法包括离线勘测和在线定位两个阶段:离线勘测阶段是在待定位区域按照一定的间隔距离确定若干采样点,形成一个采样点的网格,并将每个点上测得的RSSI连同其位置信息一同保存到数据库中,这些信息被称为位置指纹;在线定位阶段是将实时测得的RSSI与数据库中的信息比较,取信号强度最接近的采样点作为最终的定位结果。
在指纹库记录的点位信息中,一个点位上记录所接收到的AP的MAC地址和对应RSSI值。匹配算法最常用的是由微软公司采用的信号空间最近邻法(nearest neighbor in signal space,NNSS)[9]。定位时,首先扫描所在点的AP信号,读取MAC地址和对应的RSSI值,然后计算扫描到的RSSI值与指纹库中每个指纹点的匹配度Length为
(1)

2.2 WiFi信号指纹定位跳动因素分析
由于WiFi在硬件条件的制约下,使其信号随时间变化存在很大的波动性。如图1所示,在一个指纹点上选取接收到的三个AP的信号,时间间隔为1 s连续采集25次的信号强度分布图。从图1可以看出,三个AP点的信号强度都存在很大的波动。且不同的AP跳动的范围和幅度也不尽相同。图中AP2的信号强度十分不稳定,浮动范围接近20 dBm。
影响WiFi信号稳定性的因素有很多,有WiFi硬件的不稳定性、室内环境的不同、周围建筑物的材质不同等。但是针对一个特定的室内环境,流动人员成为影响WiFi信号稳定性的一个重要因素。另外,在离线勘测阶段采集样本点上WiFi信号强度的工作,一般是由相关的人员来进行。而定位面向的主要对象也是人,即针对用户携带的移动设备收到的信号强度进行定位。据统计,人体70%的部分是由水组成,水的共振频率正是无线局域网使用的通信频率2.4 GHz,因此,人也是影响室内信号传播一个十分重要的因素。为了研究人对接收信号强度的影响,利用手机作为WiFi信号接收平台做了下面的实验:在一个样本点上选取接收到的三个AP的连续25信号强度的方差来做对比,图2为对比结果图。图2中无人指仅把手机放在该样本点上不动采集25次,有人指手机平放在手中旋转一周采集25次信号。

图1 信号强度图
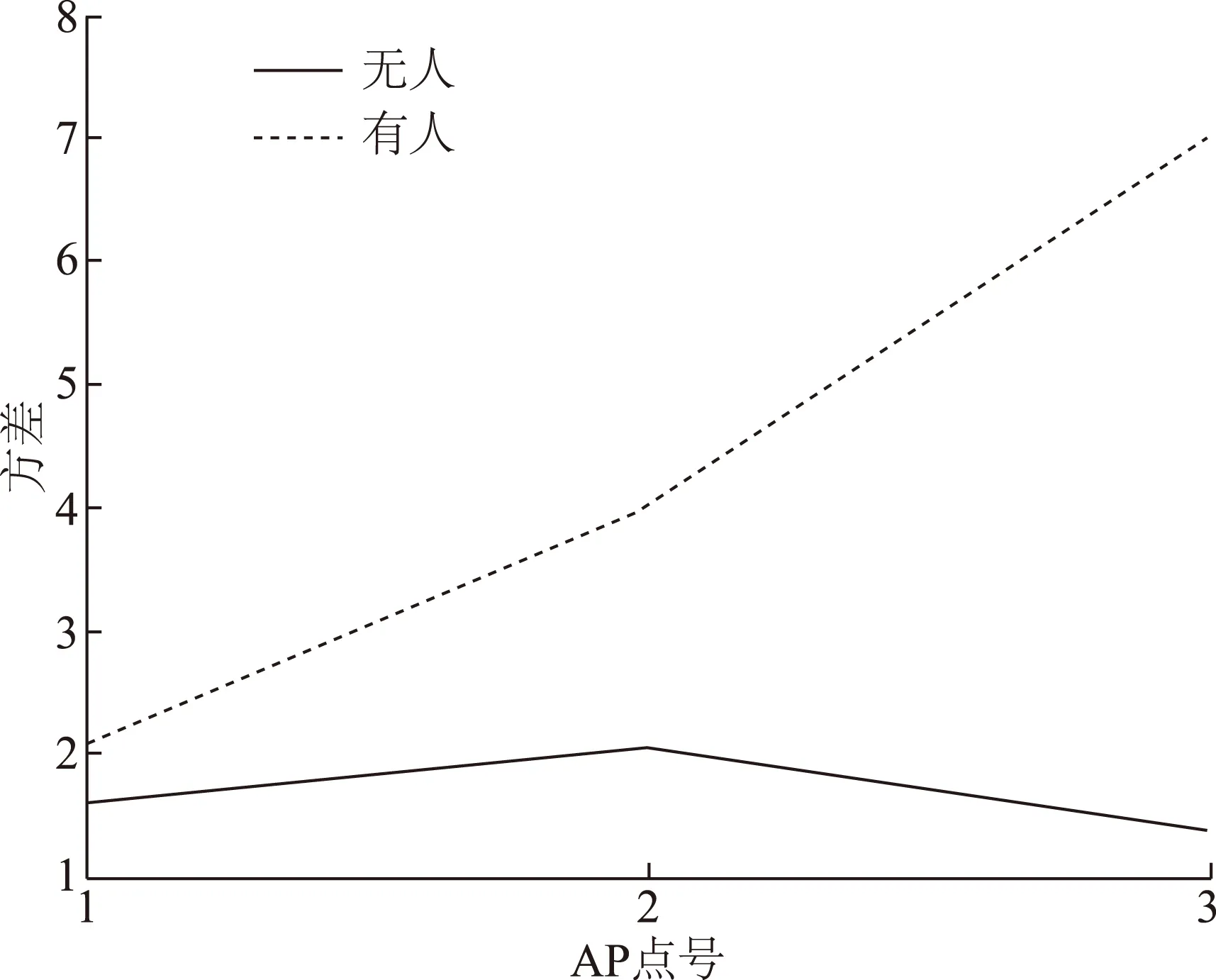
图2 信号强度方差图
由图2结果可以看出:无人情况下信号强度的方差最低,有人信号强度方差很大。说明在有人员参与采集指纹库时会影响到WiFi信号的稳定性。
综上所述,WiFi信号的波动性一定程度上会影响到定位结果的稳定性。这样就造成了在同一位置连续定位时得到的定位结果会不断变化,表现在用户界面上就会出现位置的不断跳动,这就降低了定位系统的用户体验。为模拟定位结果的跳动,在一个点静止地连续定位40次,所得定位结果如图3所示,可以看出跳动现象非常明显。常用的降噪方法就是采用均值滤波来处理定位结果,但是降噪效果并不理想。本文利用卡尔曼滤波方法对定位结果进行降噪处理。

图3 定位结果图
3 滤波算法
所谓滤波就是从混合在一起的诸多信号中提取出所需要的信号。针对WiFi信号指纹单点定位这一过程,在每一次定位结果都是一次反应位置坐标的信号,最简单的滤波算法就是对所有定位结果的坐标值求平均得出最终的滤波结果。
3.1 均值滤波
均值滤波对噪声进行了求均值运算,在某种程度上对噪声进行了平滑[10]。在连续定位过程中,每次定位只得到一组坐标值。将第k组坐标与第k-1步滤波后的坐标结果进行如下计算得出第k步滤波后的坐标结果:
(2)

3.2 卡尔曼滤波
卡尔曼滤波(Kalman filter,KF)是高斯过程最优化滤波的一种有效算法,当对象模型足够准确且系统状态和参数不发生突变时,性能较好[11]。针对WiFi信号指纹单点连续定位这一过程,对象模型是一个平面位置坐标(x,y),系统状态为恒定的值,不会发生突变,在理论上可以采用卡尔曼滤波来进行定位结果的优化。
建立以下卡尔曼滤波的过程方程和观测方程:
Xk=AXk-1+W,W~N(0,Q)
(3)
Zk=HXk+V,V~N(0,R)
(4)
卡尔曼递推滤波过程可描述如下:
输入参数:上一步预测结果Xk-1和上一步预测系数Pk-1
4 实验结果与分析
4.1 实验环境
本文定位的试验场地为中国矿业大学环境与测绘学院四层,该环境为典型的室内办公环境,部署了定位所需的AP。每个采样点的间距为3 m左右,每个采样点的采样次数为25次,采样间隔为1 s,对25次信号强度值取平均作为该采样点的最终信号强度值存入指纹库。
4.2 实验结果
针对上述实验环境,任选一试验样本点(坐标已知),进行25次连续定位并按顺序记录每次定位结果,分别利用均值滤波和卡尔曼滤波进行处理。将已知的坐标值作为真值,WiFi定位结果作为观测值,分别从观测值、均值滤波值、卡尔曼滤波值与真值的对比来做比较分析。图4为X轴方向的结果对比图,图5为Y轴方向的结果对比图。图4和图5的对比结果表明,卡尔曼滤波与均值滤波对定位结果都有一定的去噪作用,但是相比均值滤波,卡尔曼滤波的作用效果更显著,卡尔曼滤波很快就会收敛到真值附近。

图4 结果对比图

图5 结果对比图
图6为观测值、均值滤波和卡尔曼滤波的25次定位的轨迹对比图,从图中可以明显看到观测值跳动毫无规律,经过均值滤波和卡尔曼滤波处理后,跳动范围和幅度有所降低,但相比于均值滤波卡尔曼滤波的效果更显著。卡尔曼滤波最终收敛在一个很小的范围,而均值滤波未能收敛。
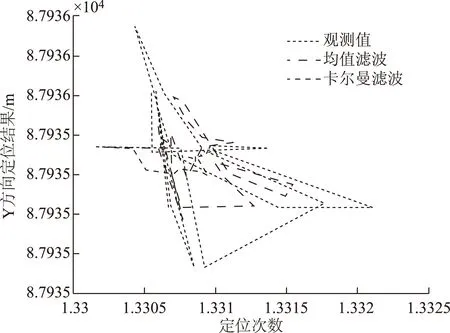
图6 定位轨迹对比图
5 结束语
本文在介绍了WiFi信号指纹定位原理基础上,讨论了WiFi信号不稳定性对单点连续定位产生的影响。利用卡尔曼滤波算法来改善定位结果跳动这一问题,对比常用的均值滤波方法,该方法能很好的去除定位结果中的噪声,使定位结果快速收敛到真实值附近,有效的解决了WiFi信号指纹连续单点定位时定位结果出现跳动的问题。
[1] CHEN Xi-hui,PANG Jun.Protecting Query Privacy in Location-based Services[J].Geoinformatica,2014,18(1):95-133.
[2] BAUER F H,HARTMAN K,LIGHTSEY E G.Spaceborne GPS Current Status and Future Visions[C]//Proceedings of ION GPS-98.Salt Lake City:[s.n.],1998:21-28.
[3] WANG Jin-ling,STEWART M P,TSAKIRI M.Modelling GLONASS Measurements for Precise Positioning[J].Survey Review,2001,36(280):110-120.
[4] YANG Yuan-xi,LI Jin-long,WANG Ai-bing.Preliminary Assessment of the Navigation and Positioning Performance of BeiDou Regional Navigation Satellite System[J].SCIENCE Science China Earth Sciences,2014,57(1):144-152.
[5] TYTGAT L,CAMPAGNE B P.Galileo:Control of Space at the Service of Citizens[C]//Proceedings of the International Symposium GEOMARK 2000.Paris:[s.n.],2000:3-20.
[6] LECHNER W,BAUMANN S.Global Navigation Satellite Systems[J].Computers and Electronics in Agriculture,2000,25(1-2):67-85.
[7] 王睿.基于多传感器融合的定位系统设计与实现[D].北京:北京邮电大学.2012.
[8] 胡天琨.基于Android的室内导航定位系统设计与实现[D].上海:东华大学.2012
[9] BAHL P,PADMANNABHAN V N.RADAR:an In-building RF-based Location and Tracking System[EB/OL].[2014-08-12].http://engr.uconn.edu/~song/classes/nes/radar.pdf.
[10] 吴建华,李迟生,周卫星.中值滤波与均值滤波的去噪性能比较[J].南昌大学学报:工科版,1998,20(1):32-35.
[11] 赵永翔,周怀北,陈淼,等.卡尔曼滤波在室内定位系统实时跟踪中的应用[J].武汉大学学报:理学版,2009,55(6):696-700.
猜你喜欢
中华眼视光学与视觉科学杂志(2022年8期)2022-08-17 06:05:42
学生天地(2020年17期)2020-08-25 09:28:48
农村青少年科学探究(2020年4期)2020-06-24 11:35:52
红领巾·探索(2018年11期)2018-12-10 01:43:30
现代测绘(2018年1期)2018-03-06 05:16:16
北京航空航天大学学报(2017年9期)2017-12-18 07:12:25
测绘通报(2016年9期)2016-12-15 01:56:16
电源技术(2016年9期)2016-02-27 09:05:39
电源技术(2015年1期)2015-08-22 11:16:28
计算机工程(2015年8期)2015-07-03 12:19:45