
基于PIC单片机的船用测速系统设计
2014-01-15 09:33余佳佳
湖北工业大学学报 2014年2期
赵 阳,余佳佳
(湖北工业大学电气与电子工程学院,湖北 武汉430068)
舰船在航行过程中,艉轴转速与转向和主机转速等重要航行数据需要实时反馈给驾驶操作人员。因此,需要对主机和艉轴状态参数实施准确监控,以确保舰船在安全、可靠的状态运行。
转速的测量按传感器安装方式可分为:接触式和非接触式。在接触式测量方式中,传感器通过弹性联轴器与被测旋转轴相联接,安装复杂。非接触式转速测量又可分为光电测量和磁性测量。光电测量虽然精度较高,但体积大、成本高。磁性测量则尺寸小,便于安装,外围电路简单,触发方式多样,使用寿命长。本文采用PIC单片机作微处理器,设计了一种基于磁性测量的船用测速系统。
1 转速测量原理
单片机通过检测测速传感器两路输出脉冲的相位差来判断转动方向,通过其中一路脉冲输出就可以进行转速测量。艉轴运行过程中,转速处于低速状态;主机运行过程中,转速处于高速状态。本系统通过功能选择拨码可以在线进行艉轴与主机测速切换。由于艉轴与主机运行状态的不同,为了保证测量的精度,本系统选择了两种测速方法。
1.1 T法测速
测量相邻两个旋转脉冲之间的时间间隔来计算转速,计算公式为

式中:N为转速,r/min;n为旋转一周的脉冲数(通常指测速码盘的齿数);T1为定时器周期;M1为定时器周期的计数值。当电机转速较低时,定时器周期的计数值分布均匀,用T法计算出来的转速精度高,适合艉轴测速。
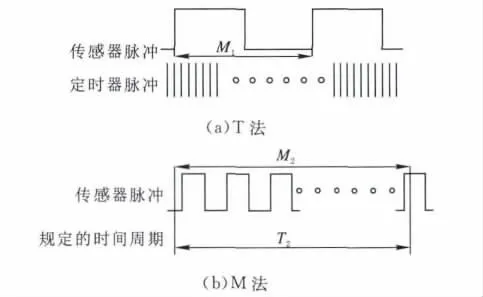
图1 两种测速方法原理图
1.2 M法测速
运用规定时间内检测到旋转脉冲的个数来测量转速,计算公式为

式中:T2为规定的时间周期;M2为检测脉冲数。当电机转速较高时,由于定时器周期的计数值分布集中,T法计算出来的转速误差大,而规定的时间周期内检测到的脉冲数分布均匀,M法计算出来的转速精度高,适合主机测速。
2 测速系统设计
2.1 系统设计
下图为测速系统的结构框图,本系统有两组信号输入端,分别接左右双艉轴测速传感器或左右双主机测速传感器,两个传感器均采用W18LD型传感器。其中输入为两个双路测速传感器的四路脉冲信号,高电平约24V,低电平小于0.5V。W18LD型传感器为双向测速传感器,具有0~10kHz宽响应频率,输出两路有相位差的幅度稳定的方波信号。触发形式包括:钢铁齿轮、齿条、凹槽、孔洞、软磁和硬磁材料。
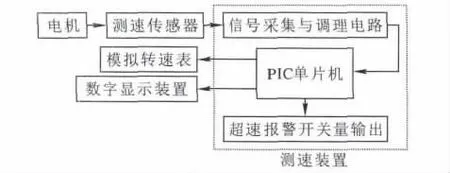
图2 系统结构框图
单片机读入4路脉冲信号进行处理,计算出双艉轴或者双主机的转速与转向。如果计算出的转速大于设定的超速临界值,输出开关量报警信号。测速装置通过接口将计算出的转速通过D/A转换后直接连接到模拟转速表显示,同时通过RS485和CAN接口将处理后得到的艉轴或者主机的信息送至数字显示装置上显示。
2.2 硬件电路设计
2.2.1 信号采集与调理电路 图3为一路脉冲信号输入电路,本系统采用的传感器为外包有屏蔽层的四芯电缆,屏蔽层接地后具有非常良好的去除电磁干扰效果。在变频器驱动电机旋转的强电磁干扰环境下,光耦6N137原边的脉冲波形比较理想,副边经过电容滤波处理,进入单片机引脚的脉冲波形质量良好。另外3路脉冲输入电路与此电路相同。
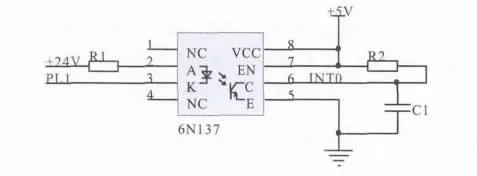
图3 传感器脉冲输入电路
2.2.2 模拟量输出调节电路 测速装置外接模拟转速表,模拟转速表一般为0-±10V电压表。艉轴正车时,需要输出0~+10V电压值;艉轴倒车时,需要输出0~-10V电压值。而所选用的D/A转换芯片只能输出0~+5V电压值,故需要对输出电压进行调节。如图4所示,选用高精度运放OP07,双电源供电,取R6/R5=R8/R7=4,得V0=4(DA1-2.5)V。此电路完成了将0至5V电压值转换为-10V~+10V电压值。
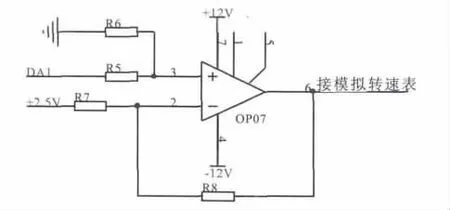
图4 模拟量输出电路
2.2.3 RS485和CAN接口电路 测速装置内单片机串口经光耦隔离后与MAX485芯片相连(图5),数据按通讯协议所规定的数据格式发送。同样,数字显示装置的RS485接收电路与图5相同。

图5 RS485通讯电路

图6 CAN通讯电路
所选PIC单片机内部集成了CAN模块(图6),支持CAN1.2,CAN2.0A 和 CAN2.0B协议,CAN收发器选用的是NXP公司的TJA1051。测速装置和数字显示装置的CAN通讯电路均见图6。CAN网络中的各节点均可接收需要的数据信息,易于系统集成和扩展。
2.3 软件设计
单片机的软件部分主要包括测速装置主程序、定时器0中断服务程序、外部中断INT0和INT1中断服务程序和数字显示装置主程序、串口接收中断服务程序以及CAN模块接收中断服务程序。测速装置中定时器0中断主要用于提供周期T1(1ms)和周期T2(1s);外部中断INT0和INT1设置为下降沿触发,用于计算转速。数字显示装置中串口接收和CAN接收用于接收测速装置通讯过来的转速信息。图7~图9分别为测速装置主程序、定时器0中断和INT0中断的程序流程图。
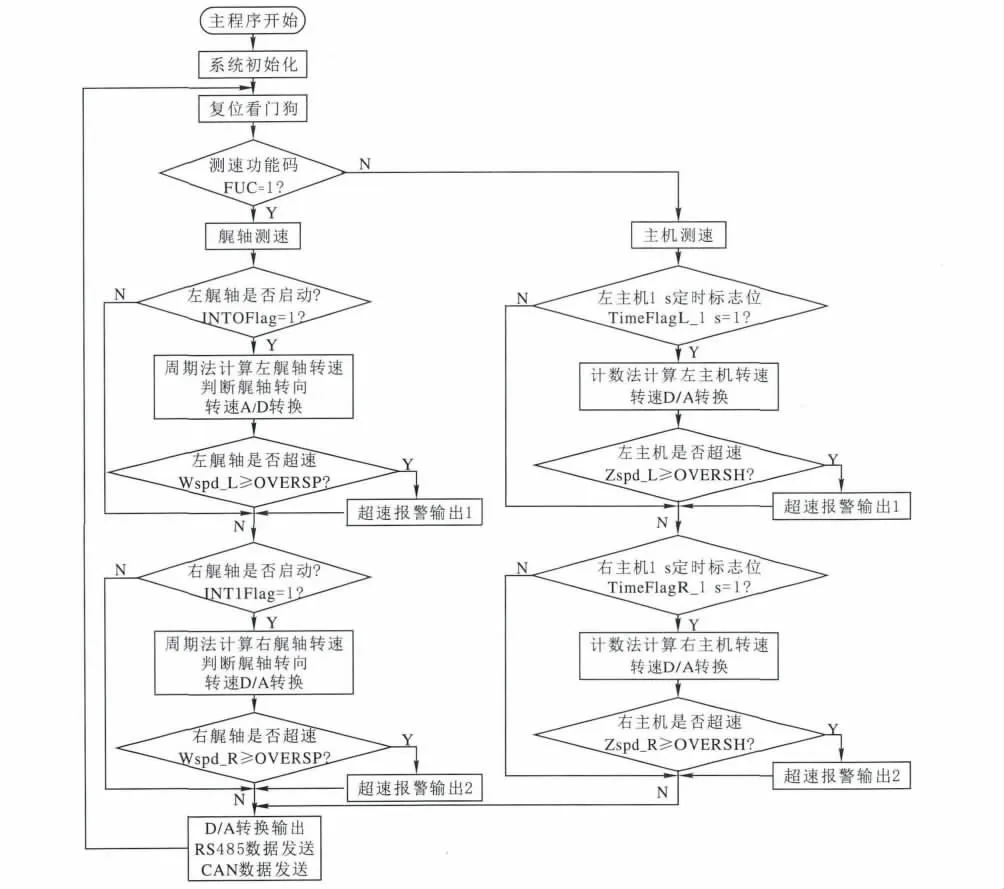
图7 测速装置主程序流程图
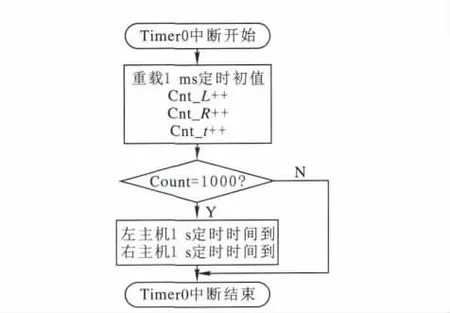
图8 定时器0中断流程图
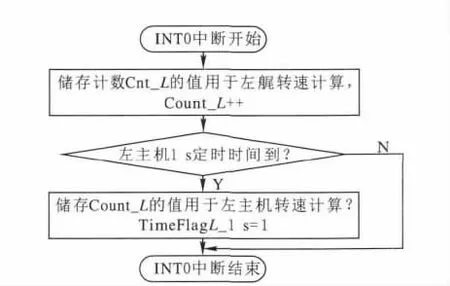
图9 INT0中断流程图
3 实验结果
为了验证测量的准确性,做了对比试验,实验结果见表1和表2。其中实际转速值N0由高精度测速仪测得。测量值N 为数字显示装置的显示值。测量误差


表1 艉轴测速实验数据
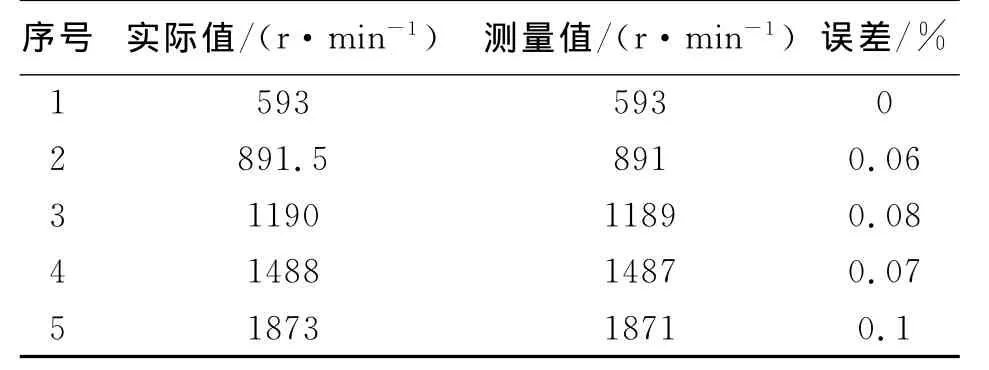
表2 主机测速实验数据
误差分析表明,T法测量艉轴转速时,测量误差在1%以内;M法测量主机转速时,测量误差在0.2%以内,该测速系统具有良好的性能。
4 结论
本文主要设计了一种基于PIC单片机和磁性测速传感器的船用测速系统。运行实验表明,该系统工作稳定可靠,具有实用价值。该设计思想可推广到其他工程应用领域,尤其在测量空间有限或传感器不便安装的条件下,该测速系统具有明显的优势。
[1] 郑凤阁.轮机自动化[M].大连:大连海运学院出版社,1993.
[2] 蔡道萌.基于嵌入式仿真和诊断技术的船舶主机遥控装置设计[D].武汉:武汉理工大学图书馆,2010-04-01.
[3] 姜庆明,杨 旭,甘永梅,等.一种基于光电编码器的高精度测速和测加速度方法[J].微计算机信息,2004,20(06):48-49.
[4] 蔡道萌,胡国梁.基于CAN总线技术的船舶艉轴监控装置 设 计 [EB/OL].[2010-05-19].http://www.paper.edu.cn.
[5] 范则阳.基于分布式总线的船舶非接触数字式艉轴转速测量装置[J].机电工程,2013,30(06):707-710.
猜你喜欢
数学物理学报(2022年3期)2022-05-25
科学与信息化(2021年15期)2021-06-11
视听(2020年3期)2020-06-11
电子技术与软件工程(2020年5期)2020-04-23
数学物理学报(2019年5期)2019-11-29
通信技术(2018年11期)2018-11-07
中成药(2017年12期)2018-01-19
时代英语·高二(2017年4期)2017-08-11
解放军健康(2017年5期)2017-08-01
建筑工程技术与设计(2015年12期)2015-10-21
