推送自锁式肩关节机构的研究设计与试验分析
2014-01-14 02:38蒋恩臣孟醒权龙哲查韶辉
东北农业大学学报 2014年2期
蒋恩臣,孟醒,权龙哲,查韶辉
(东北农业大学工程学院,哈尔滨 150030)
推送自锁式肩关节机构的研究设计与试验分析
蒋恩臣,孟醒,权龙哲,查韶辉
(东北农业大学工程学院,哈尔滨 150030)
为提高农业自动化程度,改善农业机器人的多样性与适应性,增大农业机器人作业空间,增强机械手的灵活性和作业稳定性,文章提出一种基于三自由度的具有横向推送和径向自锁功能的农业机器人新型肩关节,并对该新型机构进行了原理设计以及运动学分析,运用Matlab软件对其进行控制试验与误差分析。结果表明,该机构作业稳定性好,精度可靠,工作空间可提高50%以上,可推广应用于多功能机器人。
农业机器人;肩关节;自锁;试验设计;运动学
随着计算机人工智能和自动控制技术迅速发展,机器人已越来越多应用于各个领域[1-3]。其中,田间采摘机器人作为农业机器人类型,已引起国内外学界的关注。
农业采摘是一项劳动强度大,消耗时间长的作业。采摘机器人的应用可提高劳动生产率和作业质量,减轻劳动强度,解决劳动力不足等问题,因而具有很大的发展潜力。目前采摘机器人大多针对某一特定品种作物进行单一采摘,且手臂的采摘范围有限,作业稳定性差,甚至不够灵活,制约作物采摘的多样性,同时意味着在单季作物采摘工作结束后,该类型采摘机器人就进入休眠期,大幅降低采摘机器人利用率[4-5]。为充分高效地使用采摘机器人,使其产生更大效率,增加机器人采摘多样性和作业稳定性,本文提出一种能够更换机械手且扩大手臂采摘范围、具有横向推送和径向自锁功能的新型肩关节设计。
1 肩关节的结构设计
农业机器人新型肩关节的结构设计图如图1所示。
在U型架的内腔底部固定一旋转平台,该旋转平台下表面固定在180°旋转舵机,在其上表面固定一套T型伞齿轮组,在沿T型伞齿轮组中轴线上依次连接增速器和180°旋转舵机,在T型伞齿轮组两端连接两根长度相同的梯形丝杠,交叉式折叠推进装置的两端分别铰接在两根梯形丝杠的螺母上,其末端连接机械手推送装置,推送装置的外侧固定机械手臂。工作时,该机构中U型架在机械动力带动下可实现径向180°可控角度的旋转,而在U型架腔内的旋转平台在其底部旋转舵机的带动下可实现横向180°可控角度的旋转,同时,在舵机经增速器增速带动下,连接在T型伞齿轮组两端的两个梯形丝杠可实现等速反向旋转,从而使铰接在梯形丝杠螺母上的交叉式折叠推进装置实现直线往复运动。
在这3种不同运动的结合下,机械手推送装置的运动实际上是一种球体运动,从而保证机械手可精确到达指定空间位置,且伸缩机构的设置有效增大推送装置的空间运动范围。在径向采用蜗轮蜗杆传动以实现肩关节的自锁功能,从而增强其自身作业稳定性。

图1 新型肩关节的结构模型Fig.1 Structure model of new shoulder joint
2 肩关节的运动学分析
机械手臂的功能是将末端执行器移动到接近目标位置,并调整方向使其容易接触目标。考虑作物有不同形状、分布特点、栽培方式及生长环境,要求机械手有一套灵活而精确的路径规划,因此,需要对新型肩关节进行空间运动学分析。
2.1 利用D-H矩阵求解肩关节的运动学正解和逆解
为描述新型肩关节的特征参数以及各自由度之间的运动关系,采用Denavit-Hartenberg方法设定新型肩关节的坐标系,如图2所示。

图2 新型肩关节的坐标系Fig.2 Coordinate system of new shoulder joint
2.1.1 运动学正解
已知该肩关节的运动学参数如表1所示。
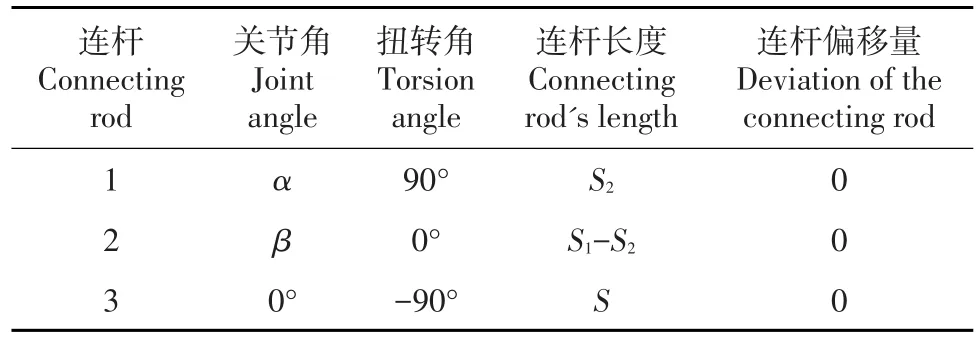
表1 肩关节的运动学参数Table 1 Kinematics parameter of shoulder joint
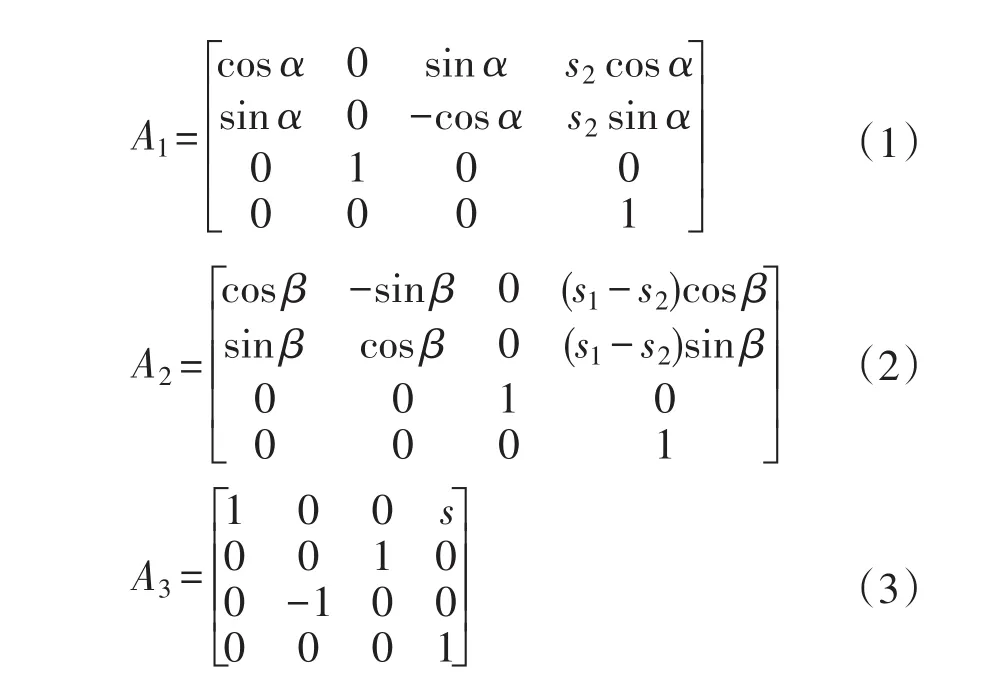
由此可得,机构连杆的D-H坐标变换矩阵为:
因此,肩关节推送装置末端位置和姿态为:

假定肩关节末端目标位置坐标为M(a,b,c),则:

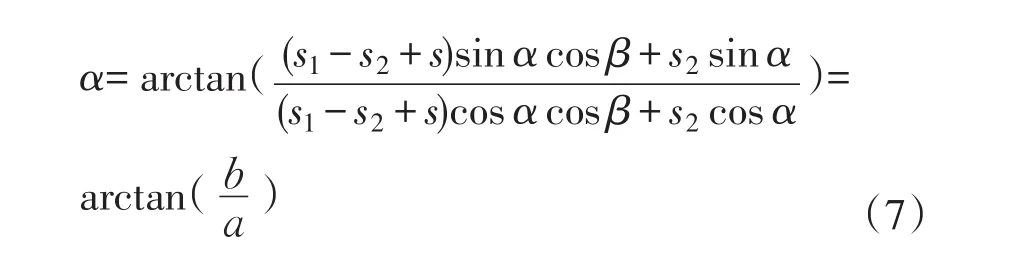
2.1.2 运动学逆解
所谓逆向运动学求解,就是针对式(6)给定的末端位姿,求解机器人各个关节的关节角[6-7]。


2.1.3 运动学空间分析
肩关节机构的空间坐标系O-XYZ如图2所示,圆心O选在径向转轴中间位置的轴心处。已知该机构的目标位置坐标为M(a,b,c),推送装置初始位置坐标为S1(s1,0,0),横向转轴初始位置坐标为S2(s2,0,0);机构径向转角为α,横向转角为β,推进装置推送距离为s,由于肩关节末端的运动为球体运动,则:
因此,推送自锁式肩关节机构的工作空间可提高:

为了保证肩关节整体的紧密性以及机构末端力矩的合理性,该机构横向转轴与径向转轴的距离s2控制在<10 cm,而推送距离s控制在10~15 cm,因此由式(9)可得,该推送自锁式肩关节机构的工作空间可提高50%以上。
2.2 求解雅可比矩阵
雅可比矩阵是关节空间速度向笛卡儿空间速度的传动比。因此,利用雅可比矩阵可以实现机器人在笛卡儿空间的速度控制。
对于转动关节的第i个连杆,其雅可比矩阵的列矢量为:
Ji=[(p×n)z(p×o)z(p×a)znzozaz]T,由式(1)和式(2)得:

对于平移关节的第j个连杆,其雅可比矩阵的列矢量为:


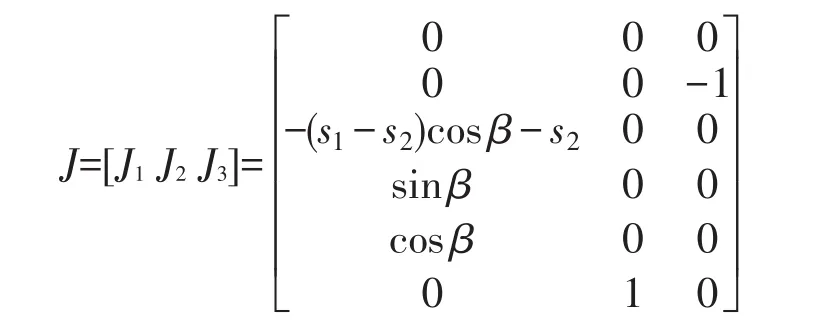
因此,机构的雅可比矩阵为:
3 实体搭建与试验
在设计好机械手新型肩关节的结构模型并对其进行运动学分析后,搭建该新型肩关节的实体结构,如图3所示。
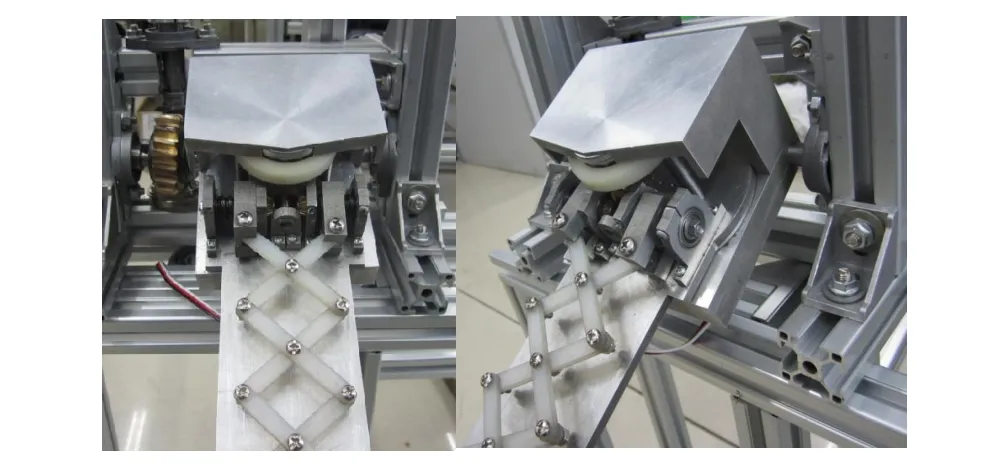
图3 新型肩关节的实体图Fig.3 Entity graph of new shoulder joint
在搭建好新型肩关节的结构实体后,对其进行试验模拟及程序控制,试验步骤如下:
1)随机选取六组不同的目标位置,并通过运动学逆解求出六组与之相对应的转角α、β和推送距离s;

图4 新型肩关节的控制界面Fig.4 Control interface of new shoulder joint
2)创建机械手新型肩关节的上位机控制界面,如图4所示(转角一即α,转角二即β);
3)将搭建好的机械手新型肩关节连接到上位机;
4)打开上位机通讯,将已求得的α、β和s输入到通过Matlab编写的控制程序中,进行试验;
5)记录数据,并进行数据分析。
通过试验得到六组目标位置的试验值,如表2所示。
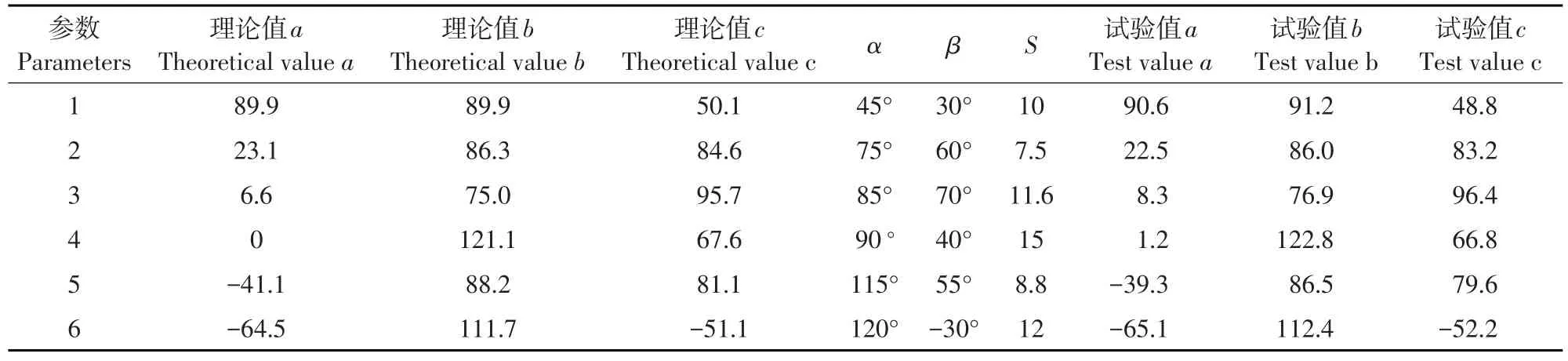
表2 新型肩关节的试验参数Table 2 Test parameters of the new shoulder joint
试验得到上述数据后,在Matlab环境下绘制出6组不同目标位置进行误差分析,如图5所示。

图5 肩关节目标位置的试验值和理论值Fig.5 Shoulder joint target location's test value and theoretical value
通过图5中目标位置试验值与理论值的空间落点可以看出,新型肩关节在试验过程中存在一定误差,但机构目标位置试验值和理论值非常接近,误差在允许范围内,满足设计要求。其中,存在误差的原因以及优化方法如下:(1)所选用的舵机扭矩偏小或脉宽频率不稳定;可选择大扭矩、高精度的舵机解决;(2)供电电压不稳定;可在系统中安装稳压模块解决;(3)机械加工及安装过程中存在误差;需严格控制加工精度,保证安装精度;(4)所选运行路径不是最优路径;需进行路径优化,确定选出最优解;(5)机构所用材料具有一定弹性;可选择刚性材料解决。
4 结论
本文提出一种基于三自由度的具有横向推送和径向自锁功能的农业机器人新型肩关节机构,并对其进行结构设计,运动学分析以及实验误差分析。实验结果表明:由于增设了机械手推进装置,使得机械手的运动范围在原球面的基础上向外扩展,加大新型肩关节工作范围,可提高50%以上;由于在新型肩关节的径向采用蜗轮蜗杆传动,使得新型肩关节具有径向自锁功能,增强其作业稳定性;经实验分析,该新型肩关节的作业误差在允许范围内,拆装方便,可推广应用于多作业机器人。
[1]李团结.机器人技术[M].北京:电子工业出版社,2009.
[2]赵匀,武传宇,胡旭东,俞高红.农业机器人的研究进展及存在的问题[J].农业工程学报,2003,19(1):20-24.
[3]谢存禧,张铁.机器人技术及其应用[M].北京:机械工业出版社, 2005.
[4]方建军.采摘机器人开放式控制系统设计[J].农业机械学报, 2005,36(5):83-86.
[5]Peng C,Yoshizo H,Mitushi Y.Grasping control of robot hand us⁃ing fuzzy neural network[J].Lecture Notes in Computer Science, 2006,39(72):1178-1187.
[6]谭民,徐德,侯增广,等.先进机器人控制[M].北京:高等教育出版社,2007.
[7]崔冰艳,金振林.农业机器人新型肘关节的静力学性能分析[J].农业工程学报,2011,27(3):122-125.
Experimental design and analysis for a new shoulder joint with pushing and self-locking function
JIANG Enchen,MENG xing,QUAN Longzhe,ZHA Shaohui(School of engineering,NortheastAgricultural University,Harbin 150030,China)
In order to improve the degree of automation in agriculture,ameliorate the diversity and adaptability of agricultural robot and increase the work space when agricultural robot works,enhance the flexibility and operation stability of manipulator,the dissertation puts forward a kind of new shoulder joint of agricultural robot with pushing and self-locking function which was based on 3-D,and also carried out the principle design and kinematics analysis of the new mechanism,did the control experiment and analysed the result's error by Matlab.The experimental results showed that this mechanism's operation stability was good, its accuracy was reliable and its work place could improve more than fifty percent,and it could be popularized to the structure of multijob robot.
agricultural robot;shoulder joint;self-locking;experimental design;kinematics
S767.5;X172
A
1005-9369(2014)02-0089-05
2012-12-24
国家科技支撑计划项目(2011BAD20B08);教育部博士点专项科研基金项目(20132325120007)
蒋恩臣(1960-),男,教授,博士,博士生导师,研究方向为农业机械化工程。E-mail:ecjiang@sina.com
时间2014-1-17 16:37:31[URL]http://www.cnki.net/kcms/detail/23.1391.S.20140117.1637.006.html
蒋恩臣,孟醒,权龙哲,等.推送自锁式肩关节机构的研究设计与试验分析[J].东北农业大学学报,2014,45(2):89-93.
Jiang Enchen,Meng xing,Quan Longzhe,et al.Experimental design and analysis for a new shoulder joint with pushing and self-locking function[J].Journal of Northeast Agricultural University,2014,45(2):89-93.(in Chinese with English abstract)
猜你喜欢
中学生数理化·高一版(2021年3期)2021-06-09
数学物理学报(2021年1期)2021-03-29
重型机械(2020年3期)2020-08-24
河北省科学院学报(2020年1期)2020-05-25
数学年刊A辑(中文版)(2019年3期)2019-10-08
重型机械(2019年3期)2019-08-27
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2018年11期)2018-11-23
河北农机(2017年12期)2018-01-20
制造技术与机床(2017年4期)2017-06-22