
舵系统相频特性与误差分析
2014-01-10 01:13应浩,黄健,孙宾
机电工程技术 2014年5期
应 浩,黄 健,孙 宾
(总参六十所,江苏南京 210016)
舵系统相频特性与误差分析
应 浩,黄 健,孙 宾
(总参六十所,江苏南京 210016)
在伺服控制系统中,幅频特性通常容易实现,相频特性经常难以达到要求。相频特性反映了伺服系统对输入信号的跟随性,其特性往往决定着系统的整体性能。对某型无人直升机数字舵回路中影响相频特性的关键环节进行分析,并就如何提升舵系统的相频特性提供了方法。
舵系统;相频特性;时延
舵系统是无人机系统中重要的组成部分,是机械、电气和传感器等部分复杂的组合体。对舵系统的要求,除了能精确的到达指定位置,相频特性也是一个重要技术指标,它反映了舵系统对指令的响应速度,同时也反映了舵回路中从电气、机械和传感器等组成部分的真实情况[1]。本文对某无人直升机电动舵回路及影响系统相频特性的各环节进行分析,提出了误差修正的方法。
1 舵回路分析
某型无人直升机舵系统信号流程图如图1所示。
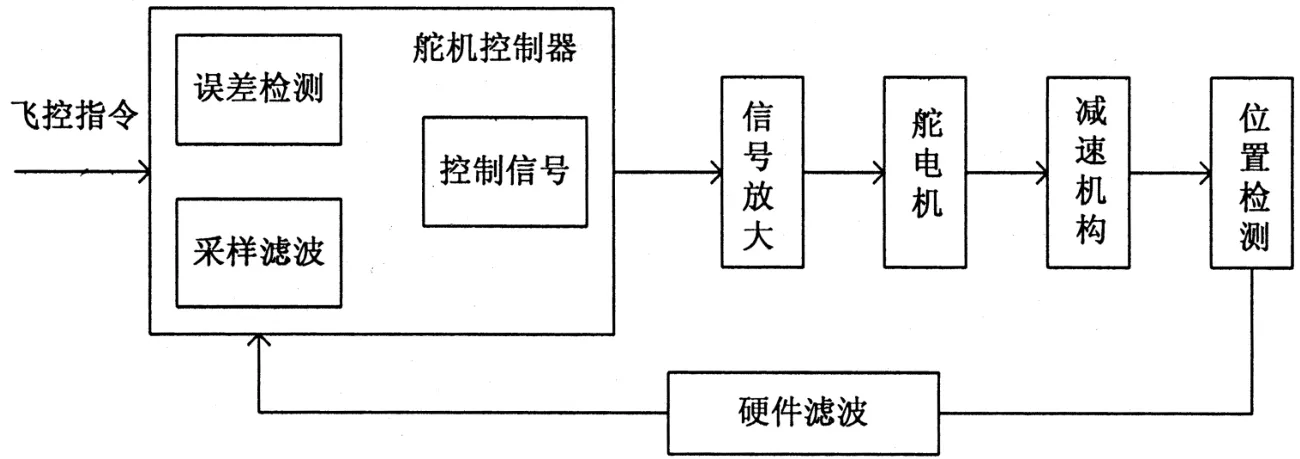
图1 舵系统信号流程图
舵机控制器采用数字控制方式,控制器一方面接收飞控计算机的指令,另一方面通过对舵机丝杆位置信号的采集,通过PID运算,发出舵电机控制指令,通过信号放大电路驱动电机,舵电机通过齿轮减速箱带动丝杆来控制无人机浆叶以完成对无人直升机的姿态控制[2-3]。系统指标要求,空载10%F.S、6 Hz正弦信号输入时,幅值衰减不超过10%,相位滞后不起过35 ms。
与幅频特性不同,舵回路中任何一个环节都影响到系统的相频特性,从图1中可以看出,影响相频特性的因素主要有反馈信号采集与滤波,误差检测与控制、减速机构的机械特性以及位置检测装置的灵敏度等。
2 相位误差产生的原因
若伺服控制系统各传递环节均可简化为系数恒定的比例环节,在这种理想情况下,频率特性的计算值与实际值是一致的[4]。但是由于系统的输入输出通道各环节的噪声干扰、滤波衰减、机械常数等非线性因素的影响,存在一定的时滞环节,使频率特性传递值产生了一定的差别,测试信号在传递过程中的幅值衰减和相位滞后现象造成了频率特性测试的系统误差,从而影响了整个控制系统的频率响应。
频率特性测试信号传递示意图如图2所示。
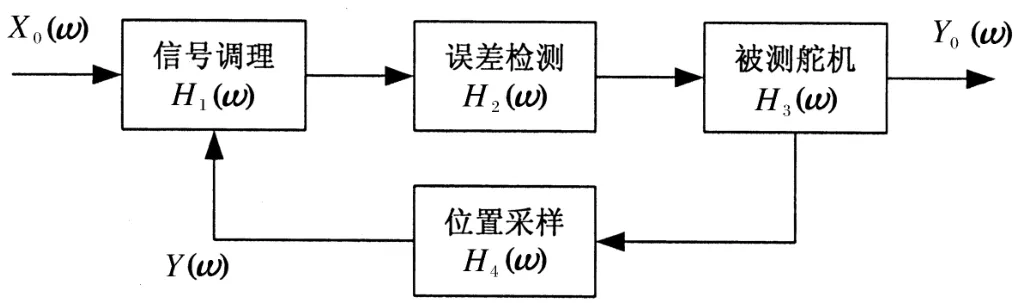
图2 频率响应测试信号传递示意图
对输入的测试信号X0(ω)、输出信号Y0(ω)进行相关滤波分析,得到被测舵机频率特性的计算值H0(ω):

本系统信号调理环节信号传递函数:

误差检测环节信号传递函数:

被测舵机:

反馈滤波电路:

式中,A1、A2、A3、A4为系统中各部分的比例环节;t1为系统采样时间常数;TPID为PID控制周期;t2为被测舵回路机械常数;t3为反馈滤波时间常数。相关值由电路及软件相关参数确定。
3 系统误差分析
3.1 舵电机
舵系统接收到飞控计算机的指令后,从静止状态下的初始位置运动到目标位置停止,从时域上分析,舵电机的运行可分3个阶段,时间/速度曲线如图3所示。
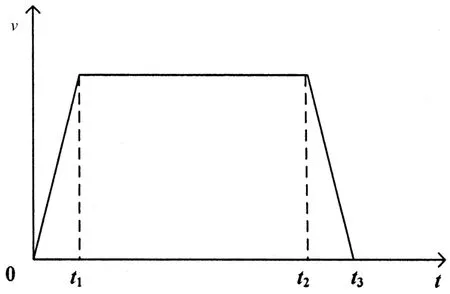
图3 舵机动行时间/速度曲线
其中,第一阶段0~t1为加速区域,速度从0加速到最大;第二阶段t1~t2为匀速运行区域,速度最大;第三阶段t2~t3为减速区域,速度从最大按照一定规则减速至0。
为使系统达到快速响应的目的,在传动比一定的情况下,提高舵机过载能力可明显减小t3的值,但由此带来系统功耗增加以及电气回路干扰增大;同样,在舵电机参数选定的情况下,在对舵电机进行控制时,可使第一、第三阶段尽可能小,第二阶段尽可能长,也能改善系统的相频特性,此部分可由软件部分算法进行实现。
3.2 信号采集与调理
对位置反馈信号进行周期性采样处理,结果用于位置环的伺服控制。反馈信号采样周期t1包括采样间隔Δt11、转换时间以及数据读取时间Δt12,通常t1≈Δt11>>Δt12。
舵系统为达到系统控制精度(±0.5%F.S)要求,对反馈信号采取了硬件滤波和软件滤波方式,采用RC滤波方式减小电路中高频信号对舵系统带来的干扰,并用软件方式对反馈信号进行平滑滤波,使系统运行更平稳,减小不必要的抖动。
软、硬件滤波时延t3,硬件滤波时间常数Δt31=RC与滤波电路的截止频率、器件选型有关;软件滤波采样矩形窗进行平滑滤波,滤波常数Δt32与软件算法有关。
理论上,反馈信号应时实反映舵机的当前位置状态,由于上述原因,信号采集与调理存在时间差t1、t3,造成了输入与反馈信号上的相位误差,通过软、硬件对电路进行优化,或对反馈信号做屏蔽、防干扰处理,也能改善系统的相频特性。
3.3 位置误差控制
位置误差控制环节是对整个舵回路进行PID调节环节,调节环节周期过快,影响舵电机运行的平稳性及连续性,调节周期过慢,影响位置检测精度,系统容易产生超调。
根据舵电机运行时间/速度曲线,对控制舵系统参数影响最大的第三阶段进行插值化处理,伺服控制采用积分分离式PI算法[5],在0~t2段使用增加大比例系数的方式,加快调节速度;在t2~t3阶段引入积分控制,提高控制精度,同时减小比例调节的比重,以控制系统的超调,从算法上优化PI调节的时间。
设定位置检测误差e(k),积分控制门限ε,精度控制门限ε0,系统伺服控制表达式:

其中:
(1)位置误差|e(k)|≥ε时,使用大比例控制系数KP;
(2) ε0≤|e(k)|<ε时,减小比例系数,同时引入积分控制项Ki;
(3)|e(k)|<ε0调节结束。
对于控制参数ε、ε0的选定,可由插值算法的控制周期、位置精度要求等进行优化调整。
3.4 机械传动的影响
机械传动部分也是影响舵系统相频特性的重要环节,包括机电时间常数、摩擦力、转动惯量等。其中,机械部分的机电时间常数与转动惯量对相位影响最大,从舵电机运行的时间/速度曲线上看,增大了0~t1的运行时间,整体上延长了舵电机的运行时间,增加了系统在相位上的延时,此部分为传动系统的固有特性,无法从根本上消除。
4 系统仿真及实验对比
某无人直升机舵系统控制回路主要参数如表1所示。
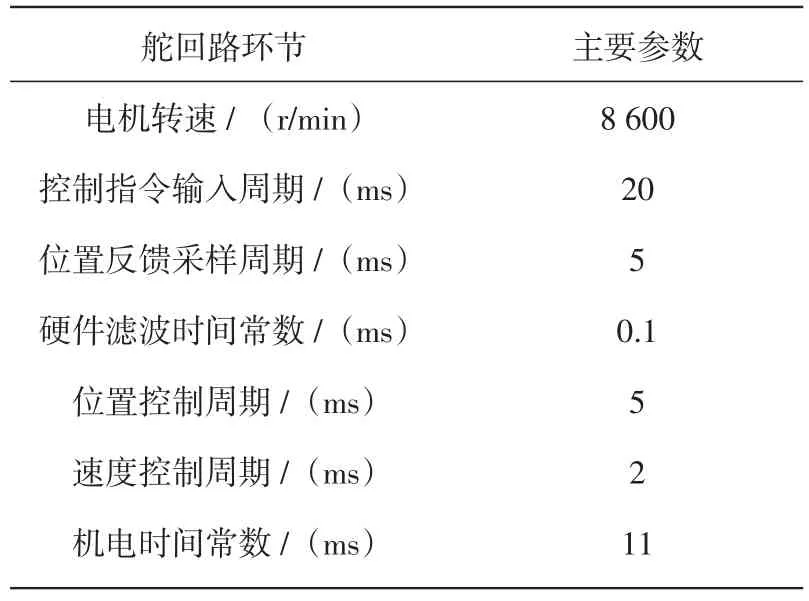
表1 某舵系统控制回路主要参数
通过上述分析,根据舵系统模型通过Matlab对系统进行6 Hz正弦信号输入波形仿真,如图4所示。波形1为输入信号,波形2为输出信号,波形3为去除机械常数时的波形图。从图4中可以看出,时滞环节引入和去除,对幅频特性影响几乎没有影响,相位跟随性提升了近20%。

图4 系统频响仿真图
空载情况下,对舵系统某通道回路分别注入幅值为10%F.S的阶跃信号和6 Hz正弦信号,输入/输出信号波形如图5、图6所示。
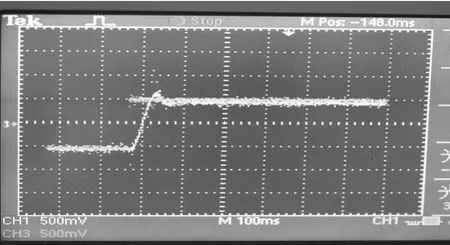
图5 系统阶跃信号响应

图6 6 Hz正弦信号输入时相频特性
从图形上可以看出,系统回路对阶跃信号的响应时间约为75 ms,超调约10%;舵系统能够对正弦输入信号进行跟踪,幅值几乎没有衰减,相位滞后约为30 ms。
5 结论
相频特性是伺服控制系统是重要技术参数,也是难以实现的部分,反映了系统从器件选型、加工、组装、软件控制优化等各各环节。通过以上对舵回路各环节分析可以看出,相频特性反映了舵回路输入输出各环节中的误差特性,有些可以优化,有些不可避免。减少系统回路中的时滞环节可有效的改善系统的跟随特性,同时,去除系统的迟滞环节,系统抗干扰能力减弱,不利于系统的鲁棒性。
[1]汪首坤,王军政.舵机频率特性的测试与误差分析与修正[J].北京理工大学学报,2007(1):35-36.
[2]王慧娟,王道波.一种无人机用小型双余度电动伺服舵机的设计[J].微电机,2010(3):24-25.
[3]高同跃,龚振邦,罗均,等.一种超小型无人机舵机控制系统的设计[J].计算机测量与控制,2007(8):1006-1007.
[4]张海涛,林辉.高精度机电伺服控制系统[J].微特电机,2007(2):35-37.
[5]杨丽.无人机无刷直流电动舵回路研究[D].南京:南京航空航天大学,2009.
Phase Frequency Characteristic and Error Analysis for Rudder System
YING Hao,HUANG Jian,SUN Bin
(The Sixtieth Institute of the Headquarters of the General,Nanjing 210016,China)
In the servo control system,the amplitude frequency characteristics are usually easy to achiever the requirement than phase frequency characteristics.Phase frequency characteristics reflect the servo system to follow the input signal,and its characteristic is often determines the overall performance of the system.This article analyzes the phase frequency characteristic of an unmanned helicopter’s rudder system,and bring forward a method to optimize the capability of rudder system.
rudder system;frequency response;time-delay
TM383.4
A
1009-9492(2014)05-0093-03
10.3969/j.issn.1009-9492.2014.05.023
应 浩,男,1981年生,安徽界首人,硕士研究生。研究领域:无人机作动系统、电机控制。已发表论文7篇。
(编辑:向 飞)
2013-11-25
猜你喜欢
重型机械(2019年3期)2019-08-27
自动化学报(2019年6期)2019-07-23
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
西部广播电视(2015年17期)2016-01-18
贺州学院学报(2015年1期)2015-02-28
舰船科学技术(2015年8期)2015-02-27
物探化探计算技术(2014年1期)2014-06-27
电力自动化设备(2013年11期)2013-09-18
电气电子教学学报(2013年1期)2013-07-05
